【原】Coursera—Andrew Ng机器学习—课程笔记 Lecture 9_Neural Networks learning
神经网络的学习(Neural Networks: Learning)
9.1 代价函数 Cost Function
参考视频: 9 - 1 - Cost Function (7 min).mkv
假设神经网络的训练样本有𝑚个,每个包含一组输入 𝑥 和一组输出信号 𝑦,𝐿 表示神经网络层数,𝑆𝐼表示每层神经元的个数( 𝑆𝑙 表示输出层神经元个数),𝑆𝐿代表最后一层中处理单元的个数。
神经网络分类分两种:
(1)二类分类:𝑆𝐿 = 0, 𝑦 = 0 𝑜𝑟 1表示哪一类;
(2)𝐾类分类:𝑆𝐿 = 𝑘, 𝑦𝑖 = 1表示分到第 i 类;(𝑘 > 2)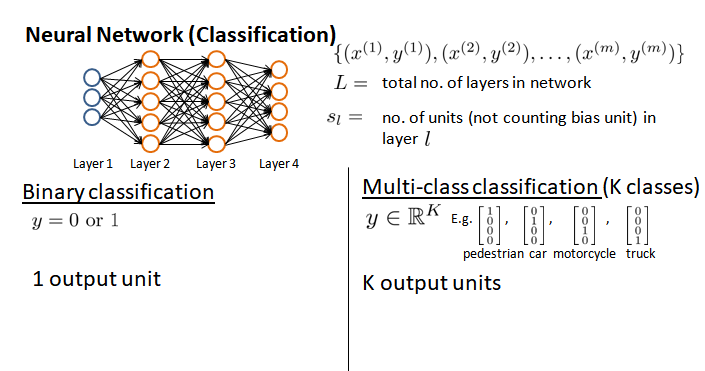
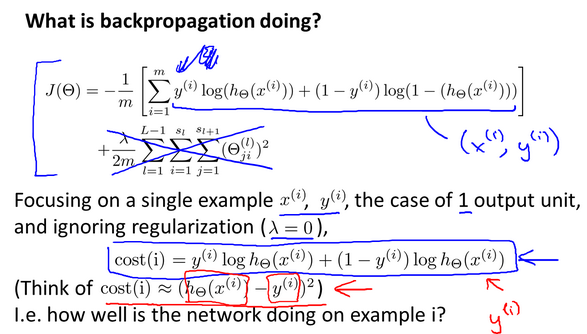
之前定义逻辑回归的Cost Function如下(前半部分表示hypothesis与真实值之间的距离,后半部分是对参数进行regularization的bias项):

神经网络的 cost function 同理:
原理都是希望得到预测结果与真实情况的误差。不同的是结果有k个。hypothesis与真实值之间的距离为 每个样本—每个个类输出的加和。
对参数进行regularization的bias项是排除了每一层𝜃0后,每一层的 𝜃 矩阵平方和。即所有参数的平方和。
9.2 反向传播算法
参考视频: 9 - 2 - Backpropagation Algorithm (12 min).mkv
为了最小化 J(Θ),需要求偏导。
采用一种反向传播算法:首先计算最后一层(最右)的误差,然后再反向(向左)求出各层的误差,直到倒数第二层(第一层是输入变量,不存在误差)。

(1)最后一层误差是激活单元的预测 aj(4) 与实际值 𝑦j之间的误差( j = 1:𝑘),设其为 𝛿j(4)
𝛿(4) = 𝑎(4) - 𝑦
(2)计算第三层的误差:
𝛿(3) = (𝛩(3))𝑇𝛿(4) ∗ 𝑔′(𝑧(3))
其中(𝜃(3))𝑇𝛿(4) 则是权重导致的误差的和, 𝑔′(𝑧(3))是 sigmoid函数的导数,sigmoid函数导数有一个特点:
𝑔′(𝑧(3)) = 𝑎(3)∗(1−𝑎(3))。
(3)计算第二层的误差:
𝛿(2)=(𝛩(2))𝑇𝛿(3)∗𝑔′(𝑧(2))
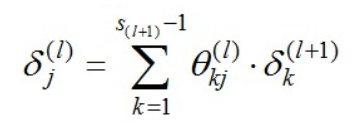
(4)有了误差,开始计算代价函数的偏导。假设 𝜆=0(即不做任何正则化处理),有:
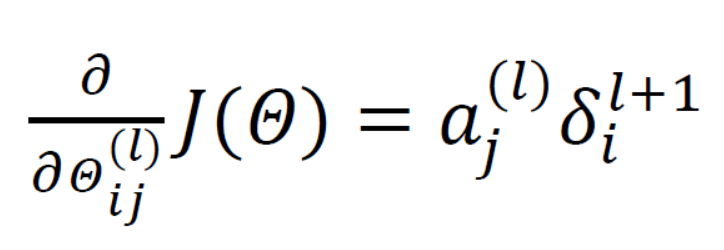
𝑙 :目前所计算的是第几层。
𝑗 :目前层中的激活单元下标(下一层的第 j 个输入变量的下标)
𝑖 :下一层中误差单元的下标(受到权重矩阵中第 𝑖 行影响的下一层中误差的下标)
上面得到了error变量δ的计算,下面来看backpropagation算法的伪代码 :
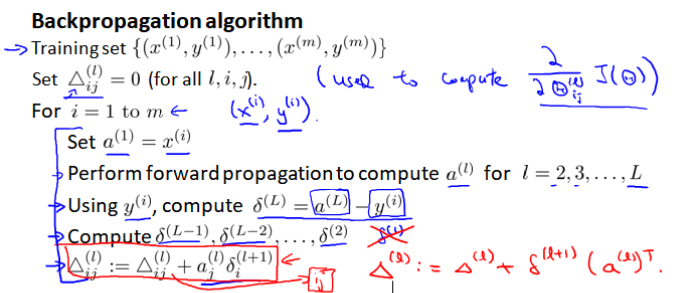
然后计算代价函数的偏导数,公式如下:

9.3 反向传播算法的直观理解
参考视频 : 9 - 3 - Backpropagation Intuition (13 min).mkv
现在说反向传播模型的学习过程。
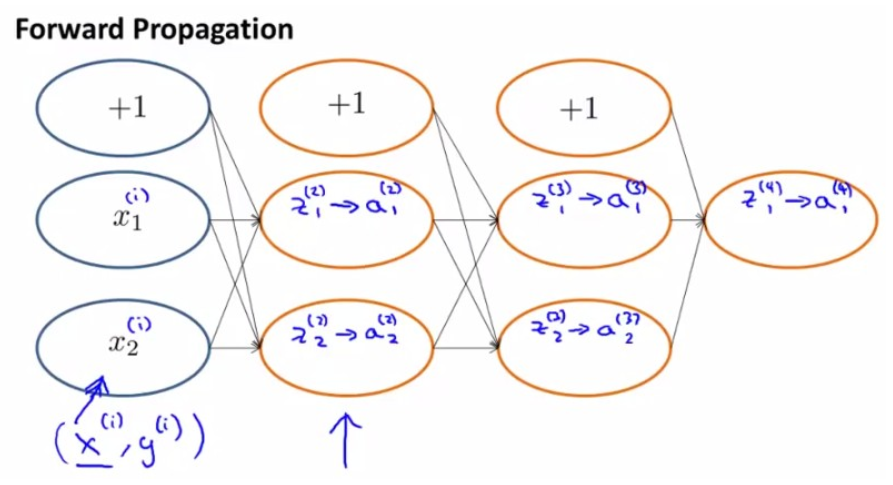
首先,前向传播算法forward propagation 从前往后计算z(j),a(j) 的过程如下:
然后将原cost function 进行简化,去掉regularization项,得到 cost(i):
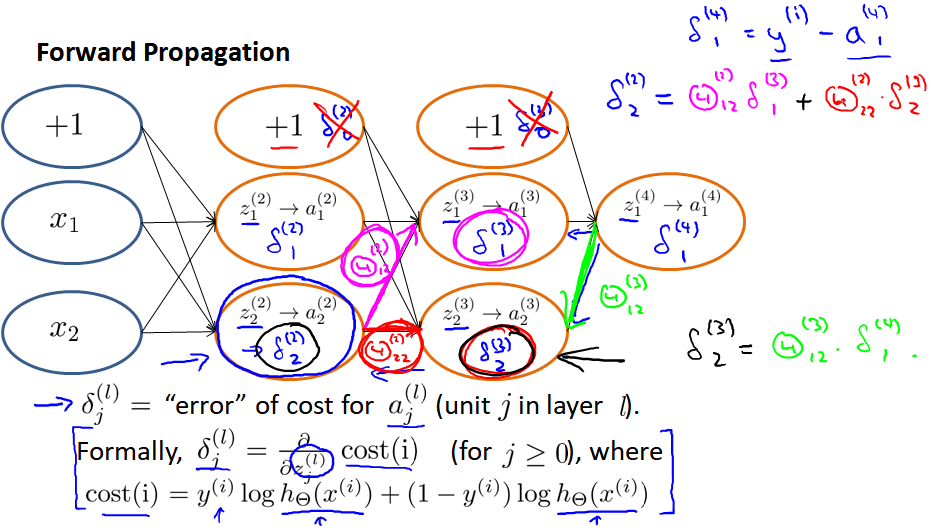
即对于每一层来说,δ分量都等于后面一层所有的δ的加权和,其中权值就是参数θ:
9.4 实现注意:展开参数
参考视频 : 9 - 4 - Implementation Note_ Unrolling Parameters (8 min).mkv
在Octave中,如果要使用fminc这样的优化算法来求解权重矩阵,需要将矩阵展开成为向量,再利用算法求出最优解后再重新转回矩阵。
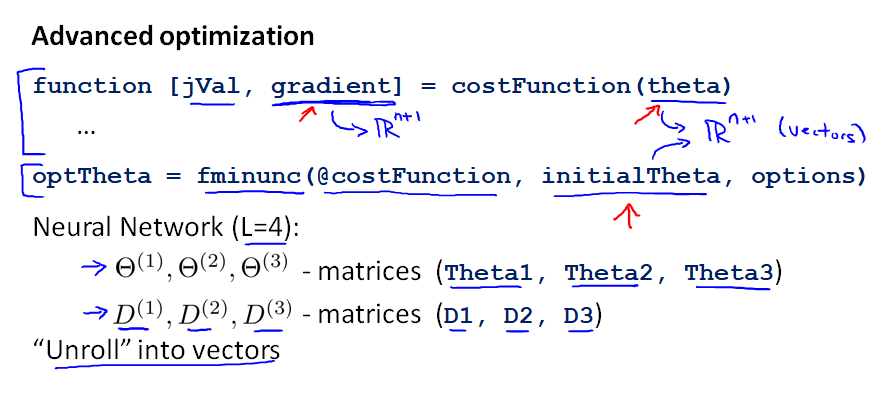
假设有三个权重矩阵:Theta1,Theta2,Theta3 。下面是将其向量化 unroll into vector,再变回矩阵的方法。
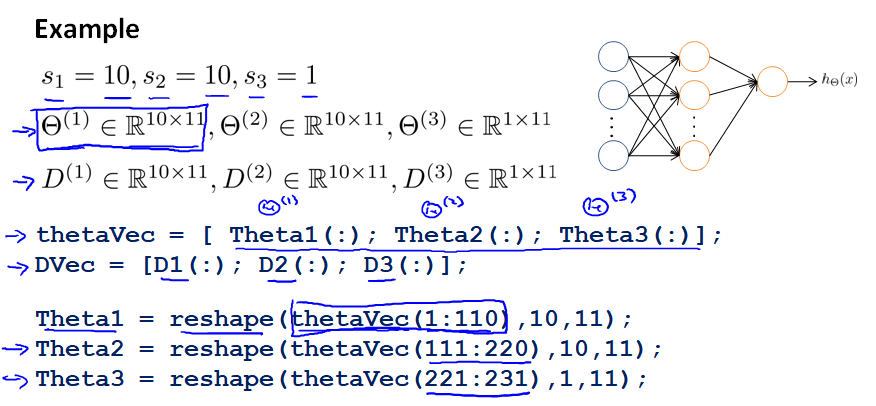
实例代码如下:
>> Theta1 = ones(10,11)
1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1
>> Theta2 = 2*ones(10,11)
2 2 2 2 2 2 2 2 2 2 2
2 2 2 2 2 2 2 2 2 2 2
2 2 2 2 2 2 2 2 2 2 2
2 2 2 2 2 2 2 2 2 2 2
2 2 2 2 2 2 2 2 2 2 2
2 2 2 2 2 2 2 2 2 2 2
2 2 2 2 2 2 2 2 2 2 2
2 2 2 2 2 2 2 2 2 2 2
2 2 2 2 2 2 2 2 2 2 2
2 2 2 2 2 2 2 2 2 2 2
>> Theta3 = 3*ones(1,11)
3 3 3 3 3 3 3 3 3 3 3
转成向量:
>> thetaVec = [Theta1(:);Theta2(:);Theta3(:)];
>> size(thetaVec)
231 1
转回矩阵:
>> reshape(thetaVec(1:110),10,11)
1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1
>> reshape(thetaVec(111:220),10,11)
2 2 2 2 2 2 2 2 2 2 2
2 2 2 2 2 2 2 2 2 2 2
2 2 2 2 2 2 2 2 2 2 2
2 2 2 2 2 2 2 2 2 2 2
2 2 2 2 2 2 2 2 2 2 2
2 2 2 2 2 2 2 2 2 2 2
2 2 2 2 2 2 2 2 2 2 2
2 2 2 2 2 2 2 2 2 2 2
2 2 2 2 2 2 2 2 2 2 2
2 2 2 2 2 2 2 2 2 2 2
>> reshape(thetaVec(221:231),1,11)
3 3 3 3 3 3 3 3 3 3 3
9.5 梯度检验
参考视频 : 9 - 5 - Gradient Checking (12 min).mkv
为了验证复杂模型内部是否呀运行正常,我们是用一种叫做 Numerical gradient checking的方法来验证梯度是否在下降。
对于下面这个J(θ)图,取θ点左右各一点(θ+ε),(θ-ε),则点θ的导数(梯度)近似等于(J(Θ+ε)-J(θ-ε))/(2ε)。

因此,针对每个θ,其导数都可以近似为:
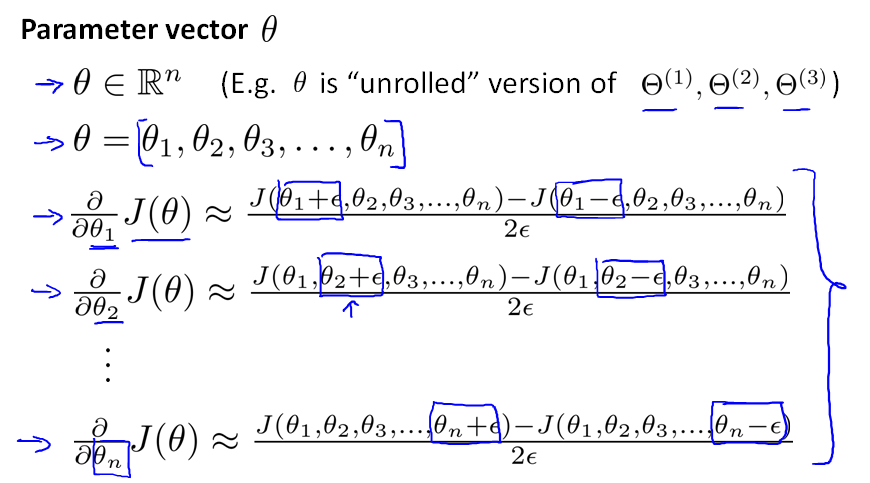
将这个近似值,与back-propagation算法中每一步得到的J(θ)的导数D(derivative)进行比较。如果这两个结果相近,则code正确,否则错误。上面描述的算法如下:

步骤:
- 在 back propagation 中计算出J(θ)对θ的导数D,并向量化成Dvec(unroll D(1),D(2),D(3))
- 用 numerical gradient check 方法计算梯度近似值 gradApprox
- 确保这两个值很接近
-(这一点非常重要)只在测试的时候进行校验。真正使用 back propagation 进行神经网络学习的时候,要停止校验,否则会非常慢
9.6 随机初始化
参考视频 : 9 - 6 - Random Initialization (7 min).mkv
之前对于逻辑回归,我们将参数θ全部初始化为0。 然而对于神经网络,此方法不可行: 如果第一层参数θ都相同(不管是不是0),意味着第二层的所有激活单元的值会完全相同。
注:这里考了几道选择题。
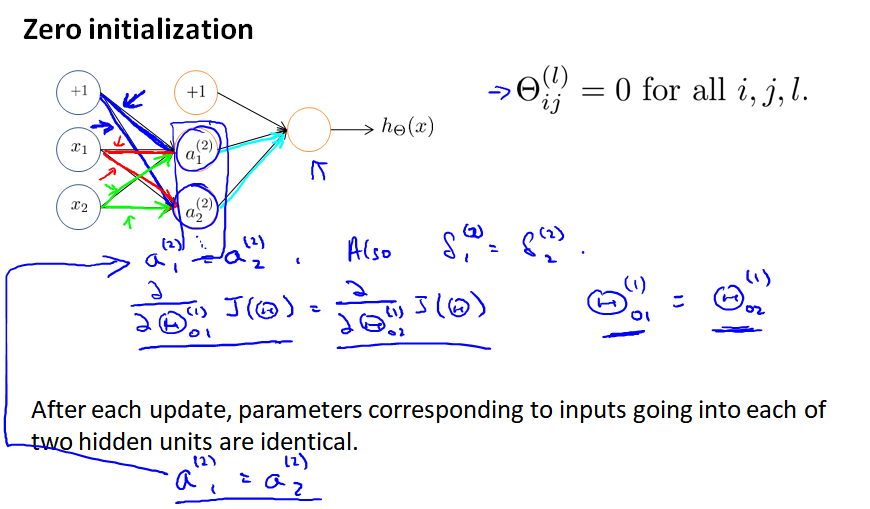
通常初始参数为正负 ε 之间的随机值,代码如下:

9.7 综合起来
参考视频 : 9 - 7 - Putting It Together (14 min).mkv
选择神经网络。通常情况下隐藏层神经单元的个数越多越好。

训练神经网络:
1. 参数的随机初始化
2. 利用正向传播方法计算所有的 ℎ𝜃(𝑥)
3. 编写计算代价函数 𝐽 的代码
4. 利用反向传播方法计算所有偏导数
5. 利用数值检验方法这些偏导
6. 使用优化算法来最小代价函数
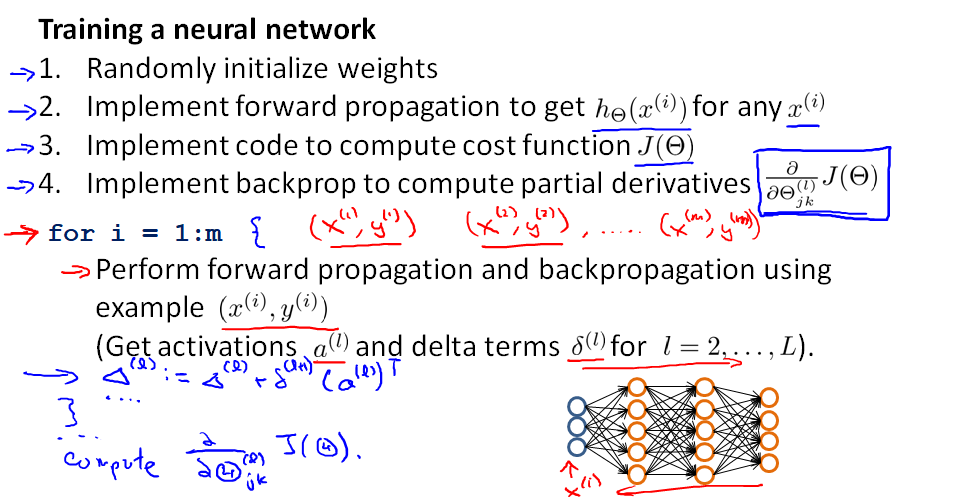
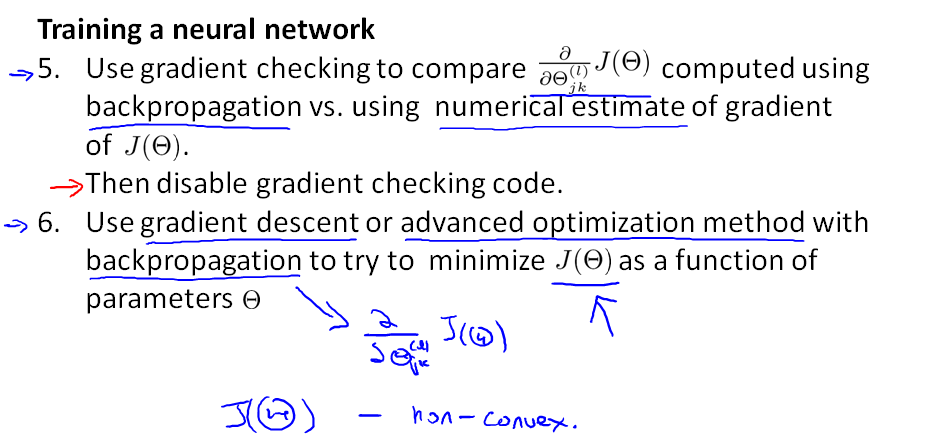
神经网络的直观表示如下。因为J(𝜃)不是一个凸函数,因此我们可以到达一个局部最小点。

9.8 自主驾驶
参考视频 : 9 - 8 - Autonomous Driving (7 min).mkv
ALVINN (Autonomous Land Vehicle In a Neural Network) 是一个基于神经网络的智能系统

https://blog.csdn.net/u010223750/article/details/50534451
神经网络过拟合有两种情况,可以通过两种方式解决:
(1)引入Validate 数据集
(2)规则化
加入规则化因子之后,整个模型其实是奔着选取较小的 w 而进化的,因为如果需要损失函数值小的话,一旦选取了比较大的 w,那么只有等式右边第一项式子的值比较小的情况下才行,因此规则化的目的其实是减轻比较大的 w 值对损失函数的影响,为什么需要这么做,我们假设对于线性回归而言,有一个数据特别偏离主模型,这样的话,往往会导致模型受这个影响比较大,从而偏离主模型,这时候就需要抵消这个数据对结果的影响,这就用到了规范化,目的是消除其某些损失函数值过大的点影响,对于神经网络,正则化的目的是为了消除太大的 w 对结果的影响,其结果就是局部的变化因素(个别 w 的变化)不会影响整个模型的数据,只有对全部模型起变化的因素才能影响到模型的建立,这样就消除了局部噪声的影响。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号