基于sift变换的农田杂草匹配定位算法matlab仿真
1.算法运行效果图预览
(完整程序运行后无水印)


2.算法运行软件版本
matlab2022a
3.部分核心程序
(完整版代码包含详细中文注释和操作步骤视频)
%对两个图片分别进行角度选择和不同角度的特征提取
if sel == 1
tic;
disp('对图片1进行处理');
[Hrl_feature1,Hr_pointl_feature1,cnt1]=func_sift_angle(img1s,m1,n1,t);
Time = toc;
disp('对图片2进行处理');
[Hrl_feature2,Hr_pointl_feature2,cnt2]=func_sift_angle(img2s,m2,n2,t);
save feature_data_B1.mat Hrl_feature1 Hr_pointl_feature1 Hrl_feature2 Hr_pointl_feature2 cnt1 cnt2 Time
else
load feature_data_B1.mat
end
%进行配准
pp = 0;
level = 0.7;%这个参数要根据不同的测试样本进行调整
image_match1 = [];
image_match2 = [];
for i = 1:(cnt1 - 1)
for j = 1:(cnt2 -1)
pp = pp + 1;
fprintf('处理进度:');fprintf('%3.2f',100*pp/(cnt1*cnt2));fprintf('%%\n\n');
NF1(i) = size(Hrl_feature1{i},1);
NF2(j) = size(Hrl_feature2{j},1);
same_feature = func_feature_match(Hrl_feature1{i},Hrl_feature2{j},level);
ind1 = find(same_feature);
ind2 = same_feature(ind1);
%根据门限来选择一定区域内的配准点
ind = find(sqrt(sum(((Hrl_feature1{i}(ind1,:)-Hrl_feature2{j}(ind2,:)).^2),2)) <= level);
ind1 = ind1(ind);
ind2 = ind2(ind);
Match1Tmp = Hr_pointl_feature1{i}(ind1,[ 1 2 3 end ]);
Match2Tmp = Hr_pointl_feature2{j}(ind2,[ 1 2 3 end ]);
image_match1 = [image_match1;Match1Tmp];
image_match2 = [image_match2;Match2Tmp];
end
end
close all;
%显示最后处理的定位效果
[LineCoordX,LineCoordY,N] = func_figure(img1s,image_match1,img2s,image_match2,Feature_point);
figure;
imshow(img1);
hold on
r=40;
theta=0:pi/50:2*pi;
for i = 1:N
x0=LineCoordX(1,i);
y0=LineCoordY(1,i);
x=x0+r*cos(theta);
y=y0+r*sin(theta);
plot(x,y,'r-','linewidth',2);
hold on
end
4.算法理论概述
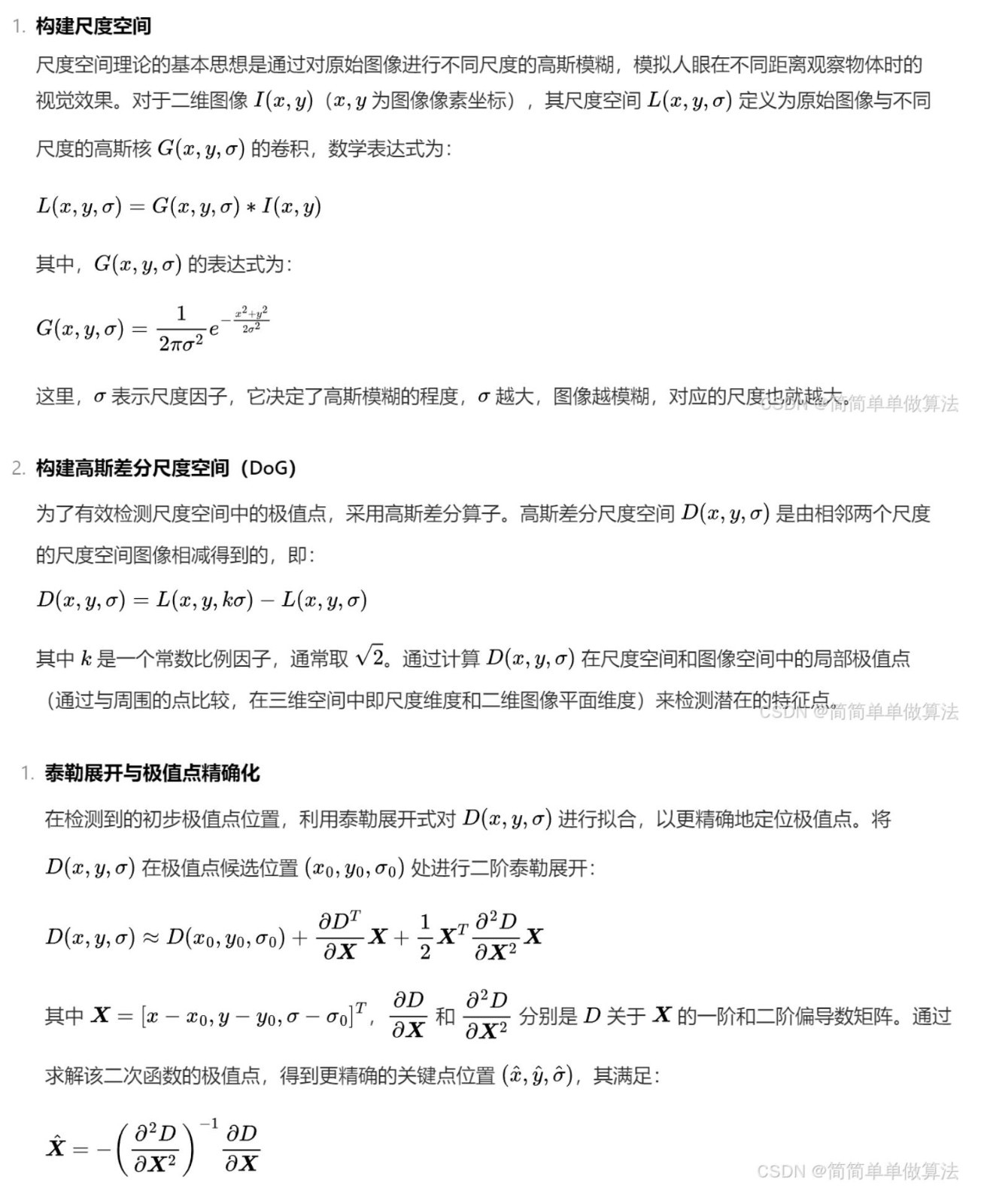
在现代农业中,农田杂草的精准识别与定位对于精准农业、杂草自动化防控等方面有着重要意义。基于计算机视觉技术,SIFT 变换能够提取图像中具有尺度、旋转、光照等不变性的特征点,进而通过特征匹配实现对农田杂草的定位,以下将详细阐述其原理。
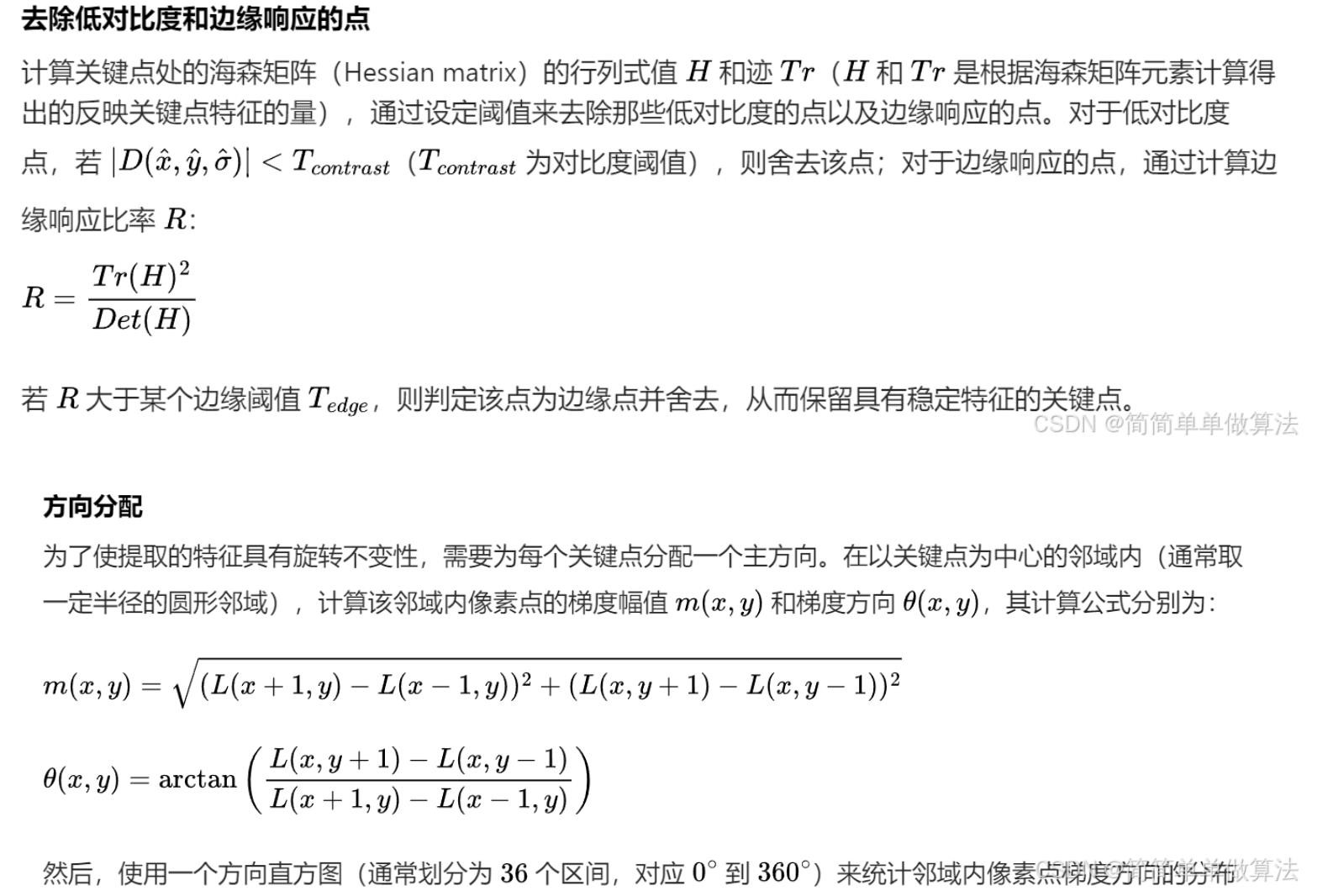
SIFT 算法主要由以下四个步骤组成:尺度空间极值检测、关键点定位、方向分配以及特征描述符生成。
基于SIFT变换的农田杂草匹配定位算法利用了SIFT特征的不变性优势,通过特征提取、匹配以及坐标变换等步骤实现对农田杂草的定位,但在实际应用中需要考虑诸多因素并不断进行优化改进,以更好地满足精准农业中杂草识别定位的需求。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号