室内障碍物射线追踪算法matlab模拟仿真
1.算法运行效果图预览
(完整程序运行后无水印)
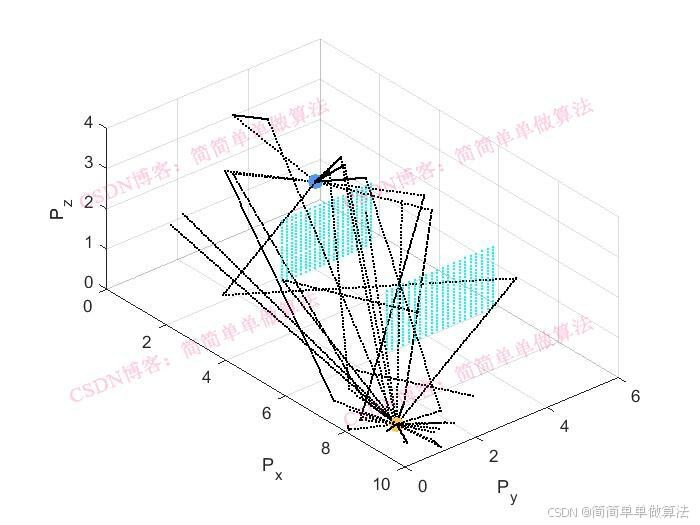
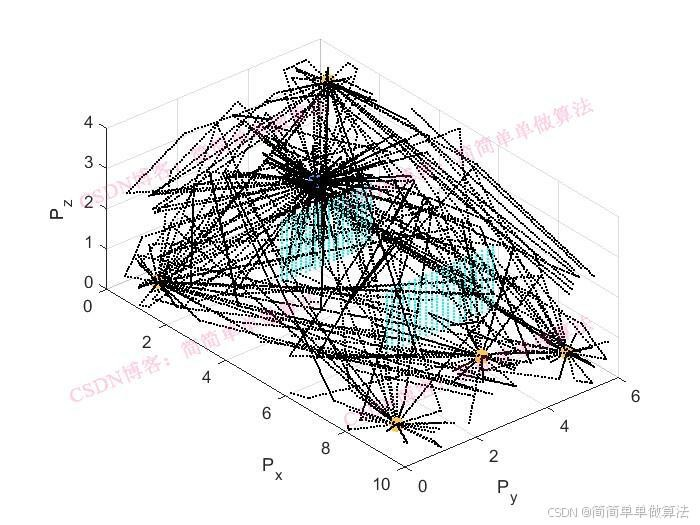
增加发射点
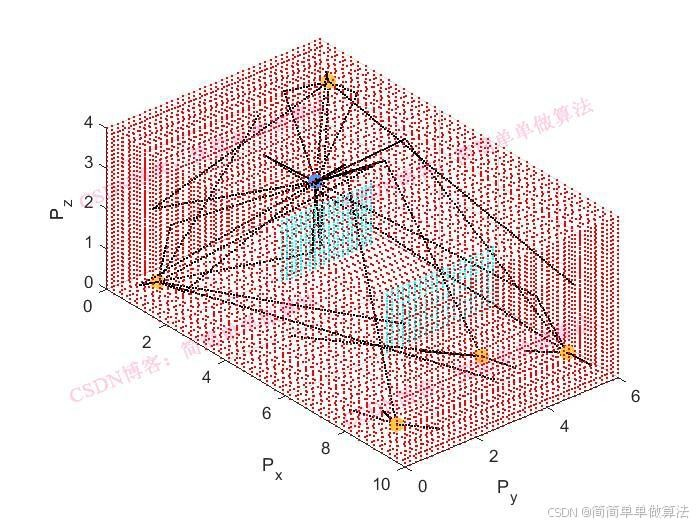
加入室内墙壁:
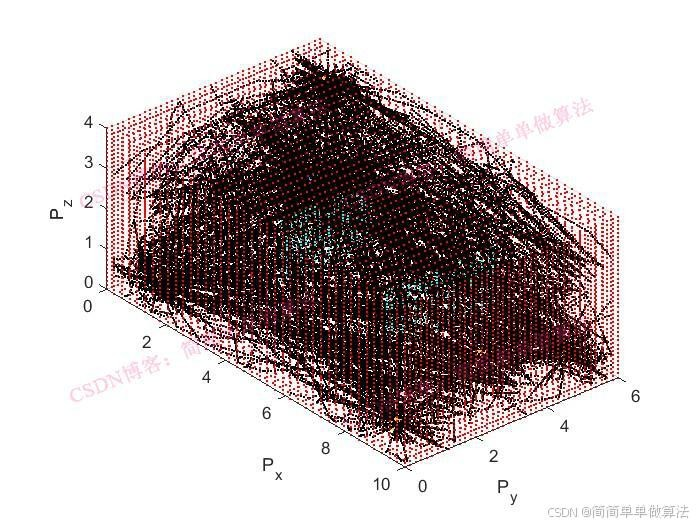
同时增加发射点和室内墙壁:
2.算法运行软件版本
matlab2022a
3.部分核心程序
(完整版代码包含详细中文注释和操作步骤视频)
%最终显示射线的间隔,如果配置高泽间隔小,那么效果更流畅
Ray_step = 0.075;
%障碍物,墙壁,点数,配置高,则设置大
VR_num = 20;
%射线碰撞的最大次数,实际则为0~Col_ray之间
Col_ray = 3;
%UWB发射机发射信号长度
Lens = 16;
%UWB带宽
BW = 1*10^6;
% 采样频率
Fs = 1e4;
%载波频率
Fc = 3*10^9;
%发射功率
TAmp = 1;
%接收功率
RAmp = 1;
%室内六个墙壁
VR3D(1,1:12) = [[0,0,1],[3,3,0] ,[0,RL],[0,RW],[-50,50]];
VR3D(2,1:12) = [[0,0,1],[3,3,RH],[0,RL],[0,RW],[-50,50]];
VR3D(3,1:12) = [[0,1,0],[3,RW,0],[0,RL],[-50,50],[0,RH]];
VR3D(4,1:12) = [[0,1,0],[3,0,0],[0,RL],[-50,50],[0,RH]];
VR3D(5,1:12) = [[1,0,0],[0,3,1],[-50,50],[0,RW],[0,RH]];
VR3D(6,1:12) = [[1,0,0],[RL,3,1],[-50,50],[0,RW],[0,RH]];
%室内障碍物
VR3D(7,1:12) = [[1,0,0],[7,3,1],[-100,100],[2,2+ZW1],[0.8,0.8+ZH1]];
VR3D(8,1:12) = [[1,0,0],[3.5,3,1],[-100,100],[2,2+ZW2],[1,1+ZH2]];
%墙壁材料
VR3m(1,1) = 0.4;
VR3m(2,1) = 0.4;
VR3m(3,1) = 0.4;
VR3m(4,1) = 0.4;
VR3m(5,1) = 0.4;
VR3m(6,1) = 0.4;
VR3m(7,1) = 1.4;
VR3m(8,1) = 1.4;
[Num_VR,~]= size(VR3D);
%%
figure;
hold on
%显示室内效果
[obstacle_number,~]=size(VR3D);
for i = 1:6
ap = VR3D(i,1);
bp = VR3D(i,2);
cp = VR3D(i,3);
dp = -(ap*VR3D(i,4)+bp*VR3D(i,5)+cp*VR3D(i,6));
Xmin = VR3D(i,7);
Xmax = VR3D(i,8);
Ymin = VR3D(i,9);
Ymax = VR3D(i,10);
Zmin = VR3D(i,11);
Zmax = VR3D(i,12);
if SEL==1%如果内存吃紧,则设置SEL为0,那么不显示六个墙壁,那么就不会太卡
func_wall(ap,bp,cp,dp,[Xmin,Xmax],[Ymin,Ymax],[Zmin,Zmax],2*VR_num,'r.');
end
end
hold on
%显示障碍物
for i = 7:obstacle_number
ap = VR3D(i,1);
bp = VR3D(i,2);
cp = VR3D(i,3);
dp = -(ap*VR3D(i,4)+bp*VR3D(i,5)+cp*VR3D(i,6));
Xmin = VR3D(i,7);
Xmax = VR3D(i,8);
Ymin = VR3D(i,9);
Ymax = VR3D(i,10);
Zmin = VR3D(i,11);
Zmax = VR3D(i,12);
func_wall(ap,bp,cp,dp,[Xmin,Xmax],[Ymin,Ymax],[Zmin,Zmax],VR_num,'c.');
end
xlabel('P_x')
ylabel('P_y')
zlabel('P_z')
view(50,30)
axis equal
grid on
axis([0,RL,0,RW,0,RH]);
24_015m
4.算法理论概述
在无线通信领域,准确地预测信号在室内环境中的传播特性对于无线网络的规划、设计和优化至关重要。室内障碍物射线追踪算法作为一种有效的电磁传播预测方法,能够模拟无线信号在复杂室内环境中的传播路径和强度,为室内无线通信系统的性能评估和优化提供重要依据。
射线追踪算法是一种基于几何光学的电磁传播预测方法,其基本思想是将无线信号视为一束射线,通过追踪射线在室内环境中的传播路径,计算信号在接收点处的场强。射线追踪算法主要包括以下几个步骤:
场景建模
首先,需要对室内环境进行建模,包括建筑物的几何形状、墙壁、地板、天花板等障碍物的位置和材料特性。通常,室内环境可以用三维空间中的多边形网格来表示,每个多边形代表一个障碍物的表面。
对于障碍物的材料特性,需要确定其电磁参数,如介电常数、磁导率和电导率等。这些参数将影响射线在障碍物表面的反射、折射和透射特性。
射线发射
从发射源(如无线基站或移动终端)发射一束射线,通常采用均匀分布或随机分布的方式发射多束射线,以覆盖整个室内空间。
每束射线都具有一定的初始方向和能量,其方向可以根据发射源的位置和接收点的位置来确定,能量可以根据发射源的功率和天线增益等参数来计算。
射线传播
追踪每束射线在室内环境中的传播路径。当射线遇到障碍物时,根据几何光学原理,射线将发生反射、折射或透射。
反射:当射线入射到障碍物表面时,根据反射定律,反射角等于入射角。反射系数可以根据障碍物的材料特性和入射角度来计算,反射后的射线能量将根据反射系数进行衰减。
折射:当射线从一种介质进入另一种介质时,根据折射定律,入射角和折射角之间的关系满足斯涅尔定律。折射系数可以根据两种介质的电磁参数来计算,折射后的射线能量也将根据折射系数进行衰减。
接收点场强计算
当射线到达接收点时,根据射线的能量和传播路径长度,计算接收点处的场强。接收点处的总场强可以通过对所有到达接收点的射线场强进行叠加得到。
对于多径传播的情况,需要考虑不同路径的时延和相位差,以准确计算接收点处的信号强度和相位。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号