基于三帧差算法的运动目标检测系统FPGA实现,包含testbench和MATLAB辅助验证程序
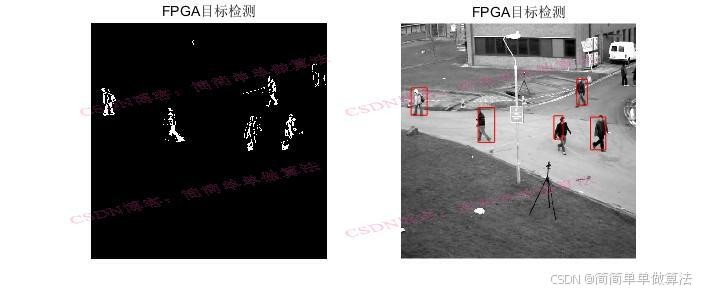
1.算法运行效果图预览
(完整程序运行后无水印)
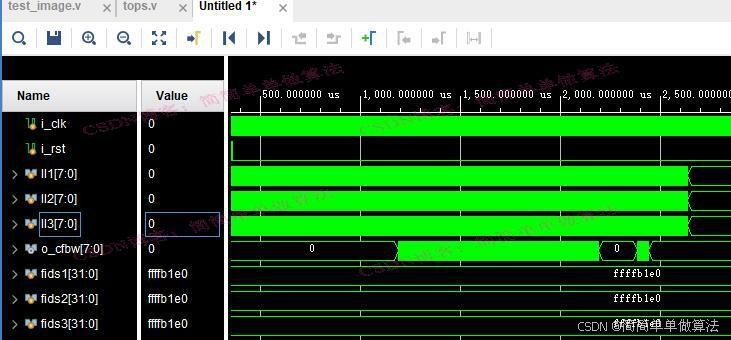
将FPGA的仿真结果导入到MATLAB中,分别得到MATLAB的结果和FPGA的结果:

2.算法运行软件版本
vivado2019.2
matlab2022a
3.部分程序
(完整版代码包含详细中文注释和操作步骤视频)
`timescale 1ns / 1ps
//
// Company:
// Engineer:
//
// Create Date: 2022/07/28 01:51:45
// Design Name:
// Module Name: test_image
// Project Name:
// Target Devices:
// Tool Versions:
// Description:
//
// Dependencies:
//
// Revision:
// Revision 0.01 - File Created
// Additional Comments:
//
//
module test_image;
reg i_clk;
reg i_rst;
reg [7:0] Buffer1 [0:300000];
reg [7:0] Buffer2 [0:300000];
reg [7:0] Buffer3 [0:300000];
reg [7:0] II1;
reg [7:0] II2;
reg [7:0] II3;
wire [7:0]o_cfbw;
integer fids1,fids2,fids3,idx=0,dat1,dat2,dat3;
//D:\FPGA_Proj\FPGAtest\codepz
initial
begin
fids1 = $fopen("D:\\code\\Proj\\1.bmp","rb");//调用3个图片
dat1 = $fread(Buffer1,fids1);
$fclose(fids1);
end
initial
begin
fids2 = $fopen("D:\\code\\Proj\\2.bmp","rb");//调用3个图片
dat2 = $fread(Buffer2,fids2);
$fclose(fids2);
end
initial
begin
fids3 = $fopen("D:\\code\\Proj\\3.bmp","rb");//调用3个图片
dat3 = $fread(Buffer3,fids3);
$fclose(fids3);
end
initial
begin
i_clk=1;
i_rst=1;
#1000;
i_rst=0;
end
always #5 i_clk=~i_clk;
always@(posedge i_clk or posedge i_rst)
begin
if(i_rst)
begin
II1<=8'd0;
II2<=8'd0;
II3<=8'd0;
idx<=0;
end
else begin
if(idx<=263145)
begin
II1<=Buffer1[idx];
II2<=Buffer2[idx];
II3<=Buffer2[idx];
end
else begin
II1<=8'd0;
II2<=8'd0;
II3<=8'd0;
end
idx<=idx+1;
end
end
//调用合并模块
tops tops_u(
.i_clk (i_clk),
.i_rst (i_rst),
.i_I1 (II1),
.i_I2 (II2),
.i_I3 (II3),
.o_cfbw (o_cfbw)
);
endmodule
0X_038m
4.算法理论概述
运动目标检测是计算机视觉中的一个重要问题,它涉及到从连续的视频帧中识别出运动物体的过程。这项技术在许多领域都有着广泛的应用,如安防监控、自动驾驶、人机交互等。三帧差算法作为一种简单的运动目标检测方法,通过对连续三帧图像的像素值进行比较,来识别出运动区域。
假设视频流中的连续三帧图像分别为It, It−1, It−2,其中t 表示当前时间点,t−1 和t−2 分别表示前一帧和前两帧。差分图像是通过计算相邻帧之间的像素值差异来获取的。对于三帧差算法而言,我们首先计算相邻两帧之间的差分图像,然后将这两个差分图像相加以获取最终的差分图像。具体步骤如下:
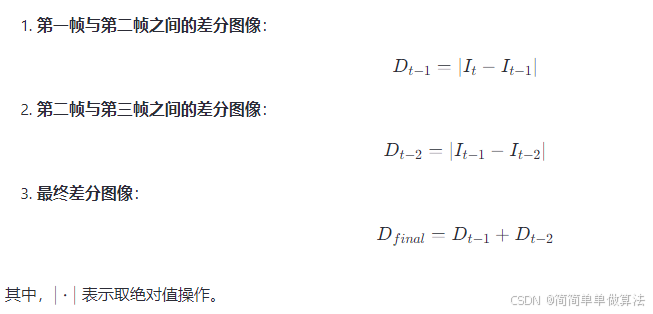
在获取最终的差分图像后,我们可以通过设定阈值 T 来检测运动目标。如果某像素点在差分图像中的值超过阈值,则认为该像素点属于运动区域。
设定阈值 T,如果某像素点(i,j) 在差分图像Dfinal 中的值大于T,则认为该像素点属于运动目标:

基于三帧差算法的运动目标检测是一种简单而有效的技术,它通过计算连续三帧图像之间的差分来检测运动目标。虽然这种方法容易受到光照变化和摄像机抖动等因素的影响,但通过一些改进措施(如适应性阈值、高斯滤波和光照补偿等),可以显著提高检测的准确性和鲁棒性。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号