基于粒子滤波和帧差法的目标跟踪matlab仿真
1.算法运行效果图预览
(完整程序运行后无水印)
原重采样方法:

改进重采样方法:

2.算法运行软件版本
matlab2013b
3.部分核心程序
(完整版代码包含详细中文注释和操作步骤视频)
for Frm = 15:Num_Frame-15
%获得每一帧图像
PIX_each_frame = read(PIX,Frm);
if Frm > 1
if Samples == 1
%粒子重采样
X1 = func_Particle_Resample(X1,STATE1);
else
%粒子改进后的重采样模块
X1 = func_Particle_advance_Resample(X1,STATE1);
end
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%更新粒子
X2 = func_Particle_Updata(Para_Updata,X_pos,X_vec,X2);
%计算状态
STATE2 = func_likelihood(X_rgb,Target,X2(1:2,:),PIX_each_frame);
%粒子重采样
X2 = func_Particle_Resample(X2,STATE2);
%跟踪效果显示
figure(1);
image(PIX_each_frame)
if Samples == 1
STR = ['(原重采样)粒子跟踪效果',num2str(Frm)];
else
STR = ['(改进重采样)粒子跟踪效果',num2str(Frm)];
end
title(STR)
hold on
plot(X2(2,:),X2(1,:),'g.');
hold on
plot(X1(2,:),X1(1,:),'g.');
hold off
drawnow;
end
end
10_023m
4.算法理论概述
粒子滤波与帧差法结合的目标跟踪技术是一种既利用了运动估计的直观性,又融合了概率统计框架灵活性的现代视觉跟踪策略。这种方法在处理复杂背景、遮挡、光照变化等挑战性场景时表现出较好的鲁棒性和准确性。
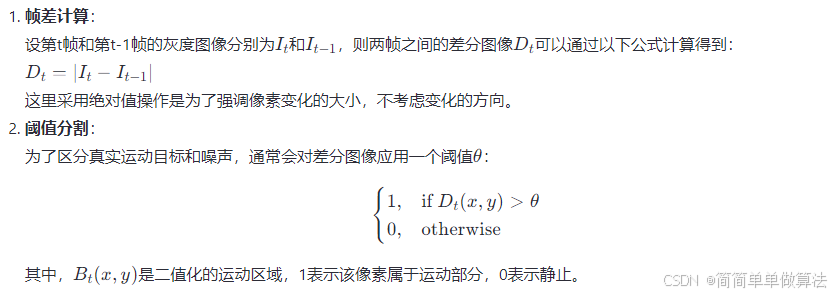
4.1 帧差法
帧差法是一种简单而有效的方法,用于从视频序列中检测动态目标。其基本思想是通过比较连续两帧之间的差异,从而识别出移动的对象。具体步骤如下:
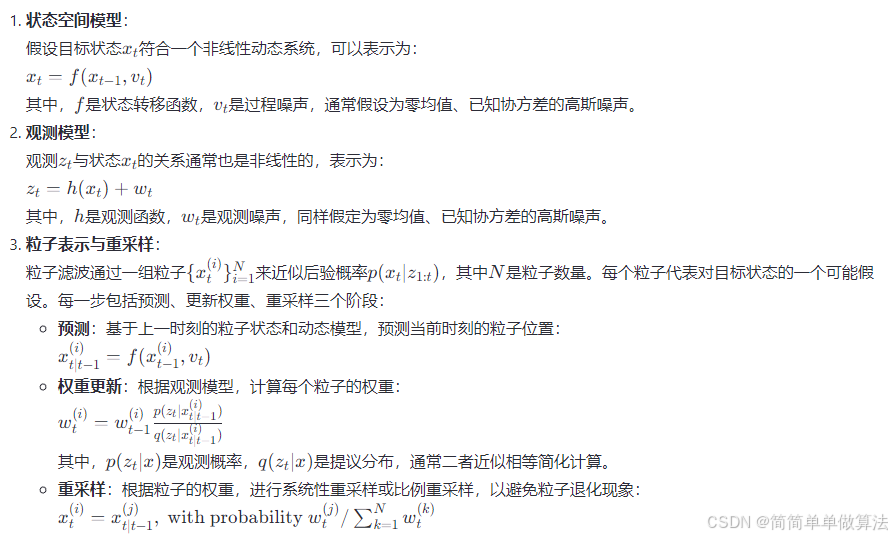
4.2 粒子滤波
粒子滤波是一种基于蒙特卡洛方法的概率滤波器,用于解决非线性、非高斯问题下的状态估计问题。在目标跟踪中,粒子滤波通过一组随机采样的“粒子”来近似目标的状态分布,并通过不断更新和重新采样这些粒子来跟踪目标状态。
4.3 粒子滤波与帧差法的结合
在实际应用中,帧差法产生的运动区域Bt可以作为粒子滤波器观测模型的一部分,即在更新权重时,利用运动区域内的信息来指导粒子的权重分配。具体地,可以将观测概率p(zt∣x)设计为与运动区域的交集度量相关,例如,如果粒子位置对应的图像区域与运动区域有大量重叠,则该粒子的观测概率较大,反之较小。这样,粒子滤波不仅考虑了目标的运动模型,还利用了帧间差异直接提供的运动线索,提高了在复杂场景下的跟踪性能。
整个算法的流程如下所示:


 浙公网安备 33010602011771号
浙公网安备 33010602011771号