基于深度学习网络的USB摄像头实时视频采集与人脸检测matlab仿真
1.算法运行效果图预览
将摄像头对这播放视频的显示器,然后进行识别,识别结果如下:





本课题中,使用的USB摄像头为:

2.算法运行软件版本
matlab2022a
3.部分核心程序
程序中包括MATLAB读取摄像头的配置方法,摄像头配置工具箱安装文件。
while toc < runtime
% Compute the frame rate averaged over the last 10 frames
if counter==10
counter = 0;
fps = 10/(toc-timeTracker);
timeTracker = toc;
end
counter = counter + 1;
% Get a new frame from the camera
img = getsnapshot(vid);
%进行识别
[R,C,K] = size(img);
KK1 = R/img_size(1);
KK2 = C/img_size(2);
tmps1 = [];
tmps2 = [];
I = imresize(img,img_size(1:2));
[bboxes,scores] = detect(detector,I,'Threshold',0.4);
bboxes2 = bboxes;
scores2 = scores;
imshow(I2, []); axis off
title(['FPS: ' sprintf('%2.1f', fps)])
end
150
4.算法理论概述
于YOLOv2(You Only Look Once, Version 2)深度学习网络的USB摄像头实时视频采集与人脸检测是一项结合计算机视觉与深度学习技术的复杂应用,旨在实时地从视频流中检测并定位人脸。这一过程大致分为几个关键步骤:图像采集、目标检测、以及后处理。
首先,通过USB摄像头采集实时视频流。这一步通常涉及硬件接口编程,确保摄像头能够以合适的帧率(例如,20fps)稳定输出视频数据。在软件层面,可能使用MATLAB的视频采集库等工具来捕获视频帧。
然后进行目标检测,采用yolov2深度学习网络:
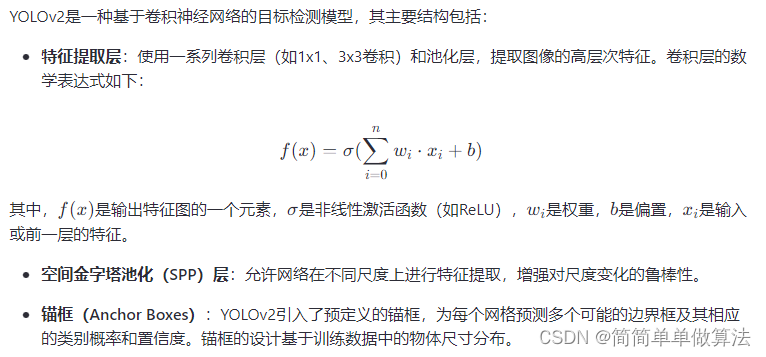
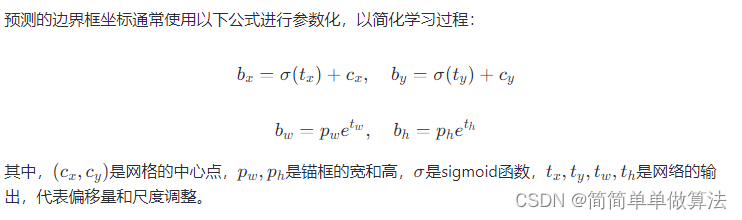
YOLOv2将目标检测视为一个回归问题,直接在输出层预测边界框的坐标、类别概率和置信度。对于每个网格(YOLOv2将图像划分为S×S个网格),网络预测B个边界框,每个边界框包含44个坐标值(中心点坐标、宽度、高度)、C个类别的概率和一个对象存在的置信度。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号