基于Volterra级数的DFE判决反馈均衡器可见光通信系统误码率matlab仿真
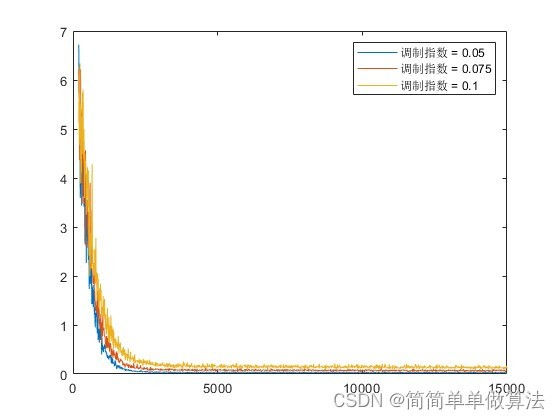
1.算法运行效果图预览

2.算法运行软件版本
matlab2022a
3.算法理论概述
Volterra级数是一种描述非线性系统行为的强大工具。在一个非线性系统中,输出信号y(t) 可以通过输入信号x(t) 的多个卷积和来表示,形成所谓的Volterra级数。第一阶Volterra核(线性部分)和高阶Volterra核(非线性部分)共同决定了系统的整体响应。对于一个非线性系统,其输出可以用以下形式的Volterra级数表示:

其中,ℎ1h1 是一阶Volterra核,代表线性响应;ℎ2,ℎ3,...h2,h3,... 是二阶及更高阶的Volterra核,它们描述了系统的非线性特性;τ1,τ2,... 表示时间延迟。
判决反馈均衡器(Decision Feedback Equalizer, DFE)原理
在通信系统中,判决反馈均衡器主要用于克服信道引起的码间干扰(ISI)。DFE包含两个主要部分:前馈均衡器(FFE)和反馈均衡器(FBF)。
假设接收信号为r(t),经过FFE处理后的信号为rffe(t),则该信号进入判决器产生初步判决结果 x^(t)。然后将x^(t) 通过反馈均衡器与原始接收信号进行减法操作,得到最终均衡后信号 y^(t):

在基于Volterra级数的DFE设计中,会利用Volterra级数对非线性失真进行建模,并在设计反馈均衡器时考虑这些非线性项的影响。
在可见光通信系统中的应用
在可见光通信(VLC)系统中,由于光源的非线性特性、光电检测器的响应以及信道的多径效应等因素,可能导致严重的非线性失真和ISI问题。因此,可以采用基于Volterra级数的DFE技术来改善这些问题。
数学模型(简化表达): 假设 VLC 系统的非线性失真可以通过高阶Volterra级数近似,那么针对接收到的信号r(t),均衡过程可描述为:

其中,hn 是第n 阶Volterra核,N 是考虑的最高阶数。
实际实现过程中,需要先通过实验或理论分析确定Volterra核的具体形式,然后将其应用于DFE的设计中,使得均衡器能够更好地抵消由非线性导致的失真,从而提高系统的误码率性能。
4.部分核心程序
% 生成随机输入信号
msg0 = randi([0,2^numberOfBits-1],maxRuns*2,1);
% 使用PAM调制
pilot = real(pammod(msg0,2^numberOfBits,0,'gray'));
% 计算卷积长度
Cov_Len = length(pilot) + LEDfreqRespPoints -1;
% 计算FFT的尺寸
NFFT = 2^nextpow2(Cov_Len);
% 对调制信号进行FFT
pilotFreq = fft(pilot,NFFT);
% 生成频率向量
f = fs/2*linspace(0,1,NFFT/2 + 1)*2*pi;
% 生成对称频率向量
w = [-fliplr(f(2:end-1)) f];
% 计算LED的频率响应
LEDResp = func_LEDfreq(w);
% 对信号进行滤波
msg_filter = real(ifft(pilotFreq.*fftshift(LEDResp)));
% 修剪滤波后的信号
filteredVin = msg_filter(1:length(pilot));
% 计算电压常数
VoltageConstant = Modn_idx*maxVoltage/((1+Modn_idx)*max(filteredVin));
% 调整信号电压
filteredVin = filteredVin*VoltageConstant + VDC;
% 计算LED输出电流
iLEDOutput = func_IV(filteredVin,Uvt,Nled,ISat);
% 计算电功率
Pow_out = filteredVin.*iLEDOutput;
% 计算光功率
Opt_Pow_out = Poptical(Eff_led,Pow_out,kNonLinearity);
% 计算光功率的卷积输出
Opt_Pow_cout = Opt_Pow_out*H_0;
% 生成噪声信号
n = randn(length(Opt_Pow_cout),1);
% 计算接收到的电流信号
Rec_Isignal = Opt_Pow_cout*R*A;
% 去直流分量
Rec_ac = Rec_Isignal - mean(Rec_Isignal);
% 计算信号功率
Rec_pow = Rec_ac'*Rec_ac/length(Rec_Isignal);
% 计算噪声功率
Pow_noise = n'*n/(length(n));
% 计算所需的噪声功率
powerNoise = (Rec_pow/db2pow(SNR));
% 调整噪声信号的功率
n = n.*sqrt(powerNoise/Pow_noise);
% 添加噪声到接收信号
Rec_voltages = (Rec_Isignal + n);
% 去直流分量
Rec_voltages = Rec_voltages - mean(Rec_voltages);
% 调整接收信号的方差
receivedVoltageSignal = Rec_voltages*sqrt(var(pilot)/var(Rec_voltages));
% 准备信号向量
xAux = [zeros(N-1,1);receivedVoltageSignal];
% 初始化权重矩阵
w = zeros(adapFiltLength,maxRuns);
% 初始化期望信号矩阵
d = zeros(maxRuns + delayinSamples + 1,1);
% 初始化误差信号矩阵
e = zeros(maxRuns + delayinSamples + 1,1);
% 对每个时间步

 浙公网安备 33010602011771号
浙公网安备 33010602011771号