基于EKF扩展卡尔曼滤波的传感器网络目标跟踪matlab仿真
1.算法运行效果图预览

2.算法运行软件版本
MATLAB2022a
3.算法理论概述
随着传感器网络技术的不断发展,目标跟踪作为其核心应用之一,在军事、民用等领域中得到了广泛的关注。扩展卡尔曼滤波(EKF)作为一种有效的非线性滤波方法,被广泛应用于传感器网络的目标跟踪中。
传感器网络是由分布在空间中的多个传感器节点组成,这些节点通过无线通信方式相互连接,共同协作完成对环境信息的感知、处理和传输。目标跟踪是指利用传感器网络获取的目标状态信息(如位置、速度等),通过一定的算法估计目标的运动状态,并实现对目标未来运动状态的预测。
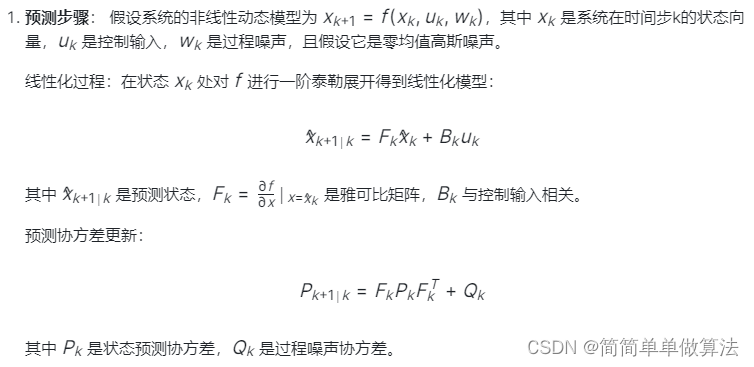
在传感器网络目标跟踪中,由于传感器节点的观测数据通常受到噪声干扰和非线性因素的影响,因此需要采用有效的滤波算法对观测数据进行处理,以提高目标跟踪的精度和鲁棒性。扩展卡尔曼滤波(EKF)正是一种适用于非线性系统的滤波方法,它通过对非线性系统进行线性化近似处理,再利用标准卡尔曼滤波框架进行状态估计和预测。
扩展卡尔曼滤波是一种处理非线性系统状态估计的方法,它通过线性化非线性过程和测量模型,在每次迭代中利用高斯分布的性质进行最优估计。
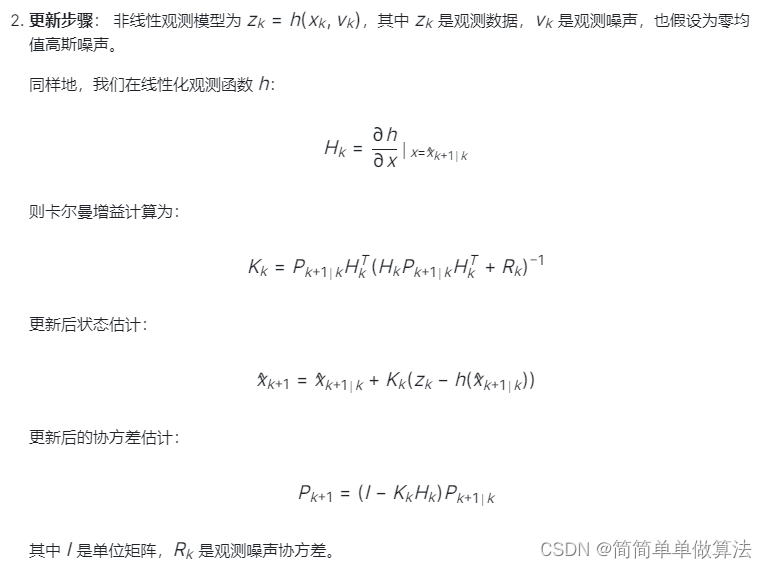
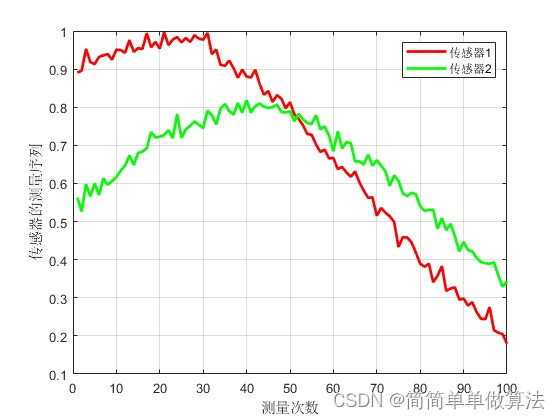
在多传感器网络环境下,每个传感器可能提供关于目标的不同视角或不同属性的观测数据。每个传感器节点都独立运行一个EKF,然后通过数据融合技术(如卡尔曼融合或分布式卡尔曼滤波)整合所有传感器的信息来获取更准确的目标状态估计。
4.部分核心程序
% 定义初始位置的均值和标准差
Xreal0 = [-0.5; 0];
sgm0 = sqrt(0.05);
% 初始化估计位置,加入随机噪声
XNreal0= Xreal0 + sgm0 * randn(2, 1); % posicion inicial estimada
% 初始化估计位置矩阵
Xst = zeros(2, MTKL);
Xst(:, 1) = XNreal0;
% 初始化位置协方差矩阵
P_t = sgm0^2 * eye(size(Xst, 1));
% 定义u的协方差矩阵
Q = 0;
% 定义测量噪声的协方差矩阵
R = sgm^2 * eye(size(Pxy, 2));
% 初始化f向量
f = zeros(size(Pxy, 2), 1);
% Kalman 滤波循环
for t = 2 : MTKL
% 预测步骤
Xst1 = A * Xst(:, t - 1) + u; % 预测位置
Pst1 = Q + A * P_t * A';% 预测协方差
% 更新步骤
J = func_jacob(Xst1, Pxy);% 计算雅可比矩阵
K_t = Pst1 * J'/(J * Pst1 * J' + R); % 计算Kalman增益
for i = 1 : length(f)
f(i) = exp(-0.5 * norm(Xst1 - Pxy(:, i))^2);% 计算预测的测量值
end
% 更新估计位置
Xst(:, t) = Xst1 + K_t * (Yr(:, t) - f);
% 更新协方差
P_t = Pst1 - K_t * (J * Pst1 * J') * K_t';
end
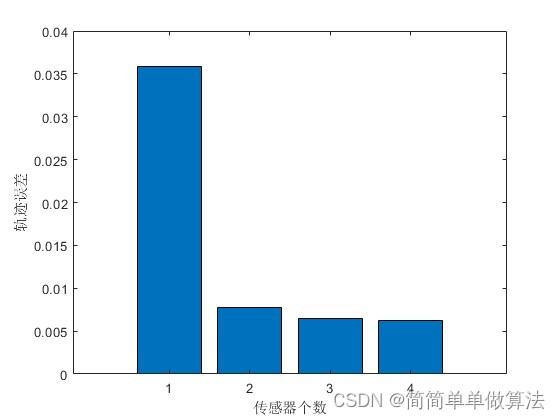
err= mean2(abs(Xr0-Xst))
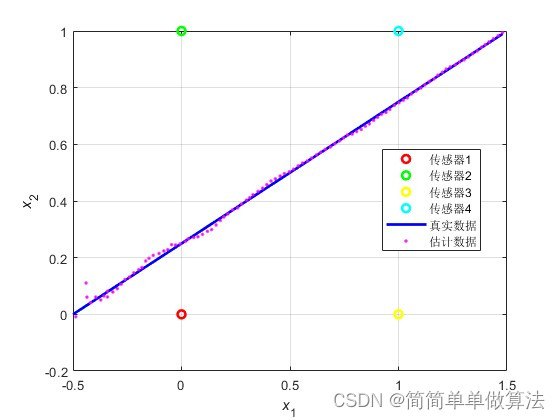
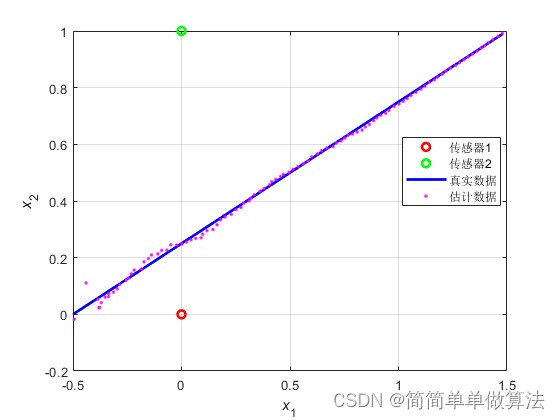
% 绘制传感器位置、真实轨迹和估计轨迹
figure
plot(Pos1(1), Pos1(2), 'ro', 'LineWidth', 2);
hold on
plot(Pos2(1), Pos2(2), 'go', 'LineWidth', 2);
hold on
plot(Pos3(1), Pos3(2), 'yo', 'LineWidth', 2);
hold on
plot(Pos4(1), Pos4(2), 'co', 'LineWidth', 2);
hold on
plot(Xr0(1, :), Xr0(2, :), 'b', 'LineWidth', 2);
hold on
plot(Xst(1, :), Xst(2, :), 'm.', 'LineWidth', 1);
xlabel('{\itx}_{1}'),
ylabel('{\itx}_{2}');
legend('传感器1', '传感器2', '传感器3', '传感器4', '真实数据', '估计数据');
grid;
save R1.mat err

 浙公网安备 33010602011771号
浙公网安备 33010602011771号