基于双目RGB图像和图像深度信息的三维室内场景建模matlab仿真
1.算法运行效果图预览

2.算法运行软件版本
matlab2022a
3.算法理论概述
三维室内场景建模在计算机视觉、机器人导航、虚拟现实等领域有广泛应用。传统的建模方法通常基于激光扫描仪或深度相机,但这些设备价格昂贵且不易普及。基于双目RGB图像和图像深度信息的建模方法则具有成本低、易于推广的优点。
3.1 双目视觉原理
双目视觉是模拟人类双眼观察物体的方式,通过两个不同视角的图像获取物体的三维信息。其核心原理是视差(Disparity)计算。
假设左右两个相机的焦距为f,基线距(两相机中心距离)为B,物体在左图像和右图像中的像素坐标分别为(xl,yl)(x_l, y_l)(xl,yl)和(xr,yr)(x_r, y_r)(xr,yr),则物体的深度Z可计算为:
Z=fBxl−xrZ = \frac{fB}{x_l - x_r}Z=xl−xrfB
此公式是基于理想情况下的双目视觉模型,实际应用中还需要考虑相机校正、图像匹配等问题。
3.2 深度信息获取
除了双目视觉,还可以通过其他方法获取图像的深度信息,如结构光法、飞行时间法等。这些方法各有优缺点,适用于不同场景。
通过双目视觉或其他方法获取深度信息后,可以将二维图像中的每个像素点映射到三维空间中,形成三维点云。点云的生成涉及相机内参和外参的标定。
假设相机内参矩阵为K,外参矩阵为[R∣T][R|T][R∣T],对于图像中的一点p=(u,v,1)Tp = (u, v, 1)^Tp=(u,v,1)T,其对应的三维空间点P=(X,Y,Z)TP = (X, Y, Z)^TP=(X,Y,Z)T满足:
p=K[R∣T]Pp = K[R|T]Pp=K[R∣T]P
通过解这个方程,可以得到点P的三维坐标。遍历图像中的所有像素,即可生成三维点云。
3.3 表面重建
生成三维点云后,需要进行表面重建以得到完整的三维模型。常用的表面重建方法有Delaunay三角剖分、Poisson表面重建等。这些方法旨在根据点云的空间分布,构建出光滑的表面模型。
4.部分核心程序
%读取左右RGB图像和对应的深度图像以进行校准
% 左RGB图像和对应的深度图像
Image_L = imread('images\Image_L.png');% 读取左RGB图像
Dep_L = imread('images\Dep_L.png');% 读取左深度图像
% 右RGB图像和对应的深度图像
Image_R = imread('images\Image_R.png');% 读取右RGB图像
Dep_R = imread('images\Dep_R.png');% 读取右深度图像
figure();
subplot(221);
imshow(Image_L );
title('双目左图')
subplot(222);
imshow(Dep_L,[0.8,3.0]);
title('双目左图深度信息')
subplot(223);
imshow(Image_R);
title('双目右图')
subplot(224);
imshow(Dep_R,[0.8,3.0]);
title('双目右图深度信息')
%将深度图像中的所有2D点反投影到3D空间中(针对左相机)
%左相机的2D点:
Dep_Lmap = func_2D_2_3D(Dep_L,Cdx,Cdy,Fdx,Fdy);
%将深度图像中的所有2D点反投影到3D空间中(针对右相机)
%右相机的2D点:
Dep_Rmap = func_2D_2_3D(Dep_R,Cdx,Cdy,Fdx,Fdy);
%将所有变换后的3D点投影到RGB图像上(针对左相机)
% 左相机投影:
[Image_Lp1,Image_Lp2] = func_3D_POINT(Image_L,Dep_L,Dep_Lmap,mat_rot,mat_tra,FLx_cam,FLy_cam,CLx_cam,CLy_cam);
% 右相机投影:
[Image_Rp1,Image_Rp2] = func_3D_POINT(Image_R,Dep_R,Dep_Rmap,mat_rot,mat_tra,FRx_cam,FRy_cam,CRx_cam,CRy_cam);
%将左相机的3D坐标转换为右相机的3D坐标系统
len = length(Image_Lp1);
pc_RGB_left_right = zeros(len, 3);
for i=1:len
pc_RGB_left_right(i, :) = (I_R * Image_Lp1(i, :)' + I_tras')';
end
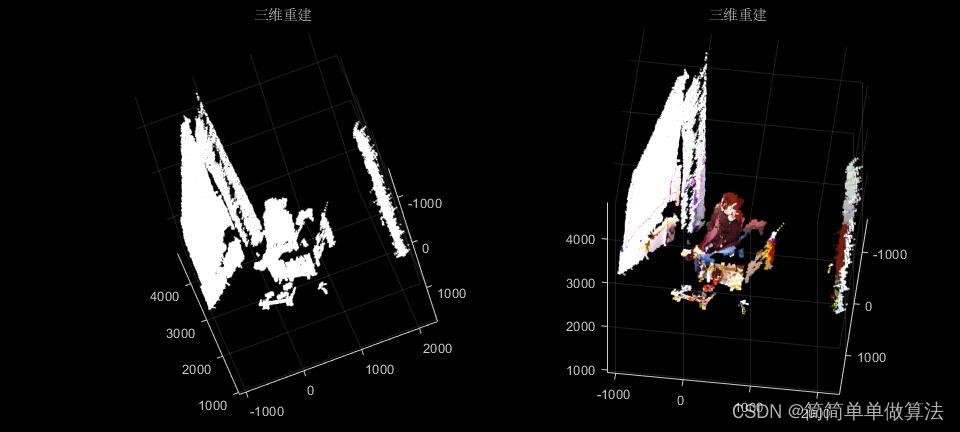
%将左右两个相机的点云合并并显示最终重建的图像
figure
subplot(121);
pcshow([pc_RGB_left_right; Image_Rp1], [Image_Lp2; Image_Rp2]);
title('三维重建')
view([150,-120]);
subplot(122);
pcshow([pc_RGB_left_right; Image_Rp1], [Image_Lp2; Image_Rp2]/128);
title('三维重建')
view([150,-120]);

 浙公网安备 33010602011771号
浙公网安备 33010602011771号