GPS信号的数字接收处理matlab仿真,包括频率点搜索,捕获跟踪,相关峰检测等步骤
1.算法运行效果图预览
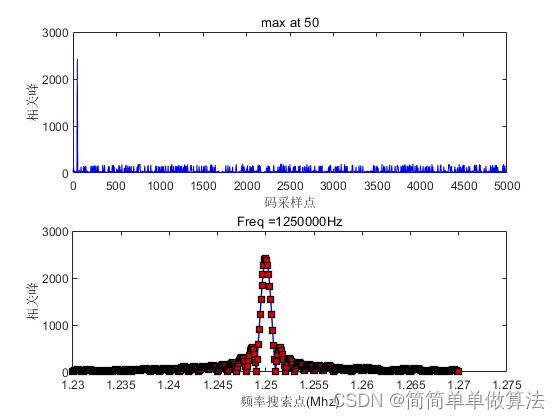

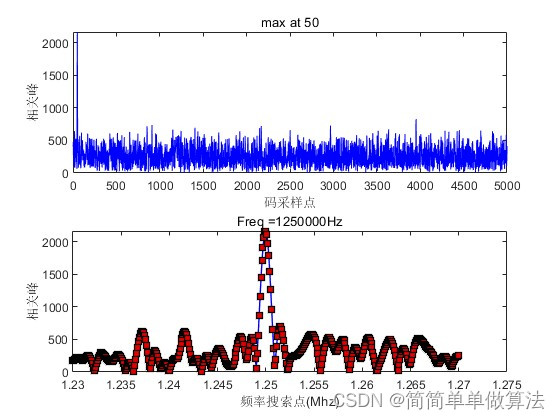
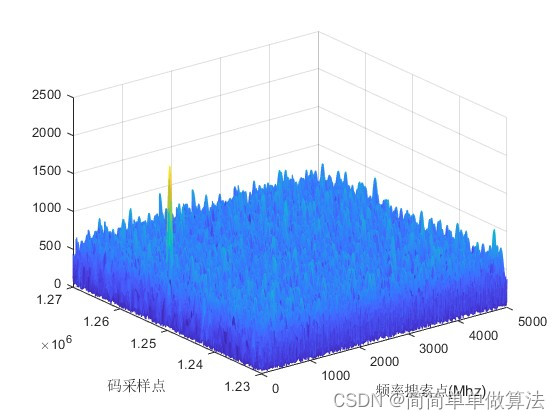
低信噪比下仿真结果如下:

2.算法运行软件版本
matlab2022a
3.算法理论概述
GPS(全球定位系统)信号的数字接收处理是GPS接收机核心技术之一,它涉及到从接收到的卫星信号中提取导航数据和解算出位置信息的一系列处理过程。这个过程主要包括频率点搜索、捕获跟踪和相关峰检测等几个步骤。下面将对这些步骤的原理进行详细介绍。
3.1. 频率点搜索
在GPS信号接收过程中,首先需要进行频率点搜索,以确定卫星信号的载波频率和码相位。由于GPS卫星信号的载波频率是已知的,但是由于接收机与卫星之间的相对运动以及信号传播过程中的多普勒效应,接收到的卫星信号频率会发生偏移。因此,接收机需要在一定的频率范围内进行搜索,以找到正确的卫星信号频率。
频率点搜索一般采用扫频的方式,即按照一定的步长,在可能的频率范围内逐一尝试,通过检测信号功率或相关峰等方法来判断是否找到了正确的频率点。为了提高搜索速度,一般采用多级搜索的策略,即先在较宽的频率范围内进行粗搜,然后在找到的候选频率点附近进行细搜,以精确确定卫星信号的频率。
3.2. 捕获跟踪
在找到正确的卫星信号频率后,接收机需要进行捕获跟踪,以实现对卫星信号的稳定跟踪和数据解调。捕获跟踪的主要任务是确定卫星信号的码相位和载波相位,并建立对信号的稳定跟踪。
捕获跟踪一般采用延迟锁定环(DLL)和载波锁定环(PLL)两个闭环控制系统来实现。DLL通过比较接收到的卫星信号与本地生成的伪随机码之间的相关性,来调整本地码的相位,使其与接收到的卫星信号对齐。PLL则通过比较接收到的卫星信号的载波相位与本地生成的载波之间的相位差,来调整本地载波的频率和相位,使其与接收到的卫星信号保持同步。通过不断调整本地码和载波的相位,捕获跟踪模块可以实现对卫星信号的稳定跟踪。
3.3. 相关峰检测
在捕获跟踪的过程中,相关峰检测是一个非常重要的环节。它的主要目的是检测接收到的卫星信号与本地生成的伪随机码之间的相关性,以判断是否已经正确捕获到卫星信号。
相关峰检测一般采用滑动窗口的方式来实现。即在一个固定的时间窗口内,不断滑动本地生成的伪随机码,并计算每个码相位下接收到的卫星信号与本地码之间的相关性。当滑动到正确的码相位时,相关峰的值会达到最大,从而判断已经正确捕获到卫星信号。同时,相关峰的值也可以用于评估信号的信噪比和定位精度等性能指标。
总结来说,GPS信号的数字接收处理是一个复杂而精细的过程,它涉及到多个环节的处理和优化。通过频率点搜索、捕获跟踪和相关峰检测等步骤的有机结合,可以实现从卫星信号中提取导航数据和解算出位置信息的目标。这些技术在GPS接收机中发挥着至关重要的作用,为我们提供了高精度、高可靠性的定位服务。
4.部分核心程序
%频偏搜索
doppler_index=0;
step1 = 100;
Fscale2 = (fr-5000):step1:(fr+5000);
D = zeros(length(Fscale2),1);
t=(0:(n-1))/Fs;
% 开始循环,以100为步长,在[fr-500, fr+500]的范围内搜索频率fc
for jj=Fscale2
doppler_index=doppler_index+1; % 更新多普勒索引
for m=1:10
% 计算I分量,用正弦函数乘以数据data,得到Icomp
Icomp=sin(2*pi*jj*t).*data((ph:5000+ph-1)+5000*(m-1));
% 计算Q分量,用余弦函数乘以数据data,得到Qcomp
Qcomp=cos(2*pi*jj*t).*data((ph:5000+ph-1)+5000*(m-1));
% 计算I,对Icomp和CA进行点乘后求和
I=sum(Icomp.*CA);
% 计算Q,对Qcomp和CA进行点乘后求和
Q=sum(Qcomp.*CA);
% 更新D(doppler_index),加上I的平方和Q的平方
D(doppler_index)=D(doppler_index)+I.^2+Q.^2;
end
end
% 对D进行归一化处理,使其最大值为1
D=D/max(D);
% 找到D中最大值所在的位置
a=find(D==max(D));
% 根据最大值的位置,计算频率f
f=fr+(a-(length(Fscale2)+1)/2)*step1;
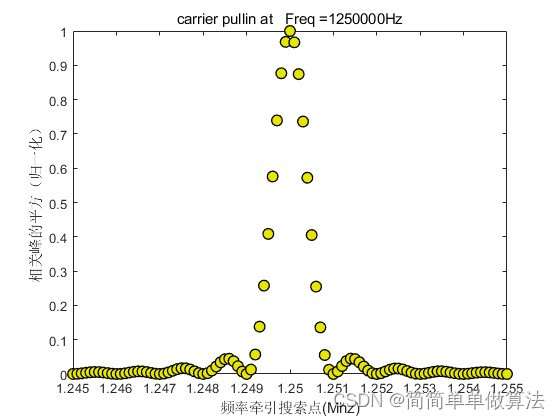
figure
plot(Fscale2/1e6,D,'ro',...
'LineWidth',1,...
'MarkerSize',8,...
'MarkerEdgeColor','k',...
'MarkerFaceColor',[0.9,0.9,0.0]);
title(['carrier pullin at ' 'Freq =' num2str(f) 'Hz'])
xlabel('频率牵引搜索点(Mhz)')
ylabel('相关峰的平方(归一化)')

 浙公网安备 33010602011771号
浙公网安备 33010602011771号