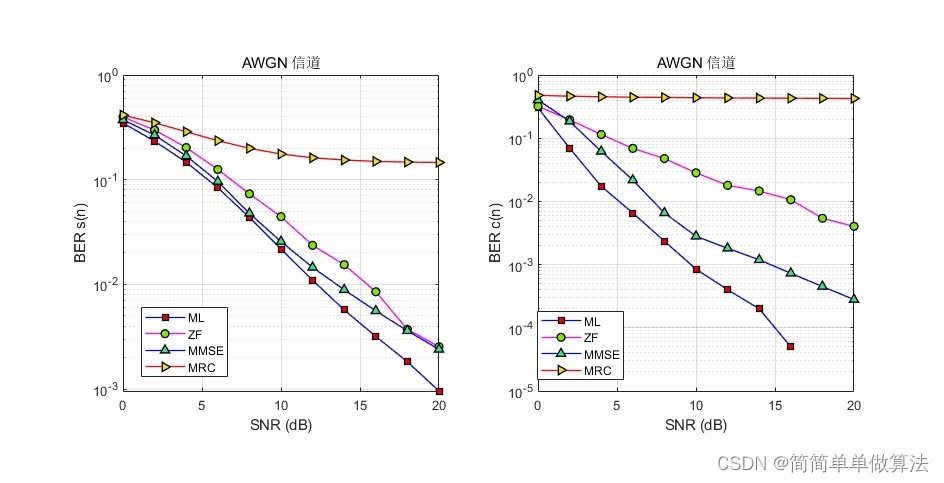
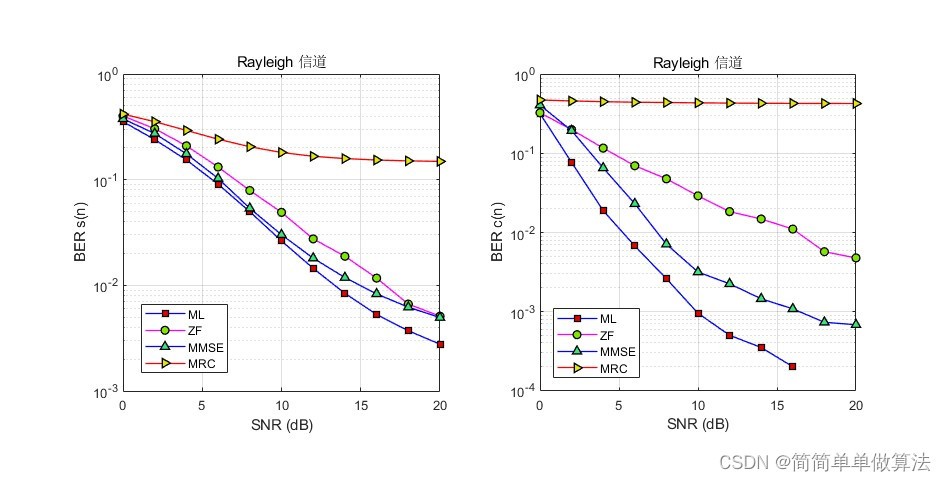
通信系统中ZF,ML,MRC以及MMSE四种信号检测算法误码率matlab对比仿真
1.算法运行效果图预览
2.算法运行软件版本
matlab2022a
3.算法理论概述
通信系统中ZF(Zero Forcing,零迫)、ML(Maximum Likelihood,最大似然)、MRC(Maximum Ratio Combining,最大比合并)和MMSE(Minimum Mean Square Error,最小均方误差)是四种常见的信号检测算法。这些算法在通信系统中用于从接收信号中恢复出原始发送信号。
3.1、ZF(零迫)算法
ZF算法是一种简单的信号检测算法,它的目标是在接收端完全消除干扰和噪声,从而恢复出原始的发送信号。ZF算法通过迫零接收端的干扰和噪声,使得接收信号只包含所需的信号分量。
假设接收信号为y,发送信号为s,信道矩阵为H,噪声为n,则接收信号可以表示为:
y = Hs + n
ZF算法通过左乘信道矩阵的逆矩阵H^(-1),得到:
s = H^(-1) * y
这样,就可以恢复出原始的发送信号s。
3.2、ML(最大似然)算法
ML算法是一种基于统计学的信号检测算法,它的目标是在所有可能的发送信号中,找到最有可能的那一个。ML算法通过比较接收信号与所有可能的发送信号的似然度,选择似然度最大的那个作为最终的检测结果。
假设发送信号有M种可能,每种可能的概率为p(s|y),则ML算法的目标是找到使得p(s|y)最大的s。具体的数学表达式为:
s_ML = arg max p(s|y)
3.3、MRC(最大比合并)算法
MRC算法是一种多天线技术中的信号检测算法,它的目标是通过合并多个接收天线的信号,提高接收信号的信噪比。MRC算法通过对每个接收天线的信号进行加权合并,使得合并后的信号信噪比最大化。
假设有N个接收天线,每个天线的接收信号为y_n,信道为h_n,噪声为n_n,则MRC算法的输出可以表示为:
y_MRC = Σ (h_n^* * y_n) / Σ |h_n|^2
其中,*表示共轭运算。
3.4、MMSE(最小均方误差)算法
MMSE算法是一种考虑噪声和干扰的信号检测算法,它的目标是在抑制噪声和干扰的同时,尽可能地减小误差。MMSE算法通过最小化均方误差来衡量检测性能的优劣。
假设接收信号为y,发送信号为s,信道矩阵为H,噪声为n,则MMSE算法的输出可以表示为:
s_MMSE = (H^H * H + σ^2 * I)^(-1) * H^H * y
其中,σ^2是噪声的方差,I是单位矩阵。
以上是ZF、ML、MRC和MMSE四种信号检测算法的原理和数学公式。这些算法在通信系统中有着广泛的应用,可以提高通信系统的性能和稳定性。
4.部分核心程序
N = 100; %Tc/TS the ratio between symbol period
num_Source_bit = 2e6; %1000000
num_Tag_bit = num_Source_bit/N;%10000
num_Channel = num_Source_bit/f_s;%100
s_Alphabet = 1/sqrt(2)* [1+1j;-1+1j ;-1-1j ;1-1j];%4x1
c_Alphabet = [1;-1]; %2x1
s_Matrix = exp(j*(randi([0 3],num_Channel,f_s)*pi/2+pi/4)); %ambient signal (QPSK) %100x10000
c_Matrix = 2*(randi([0 1],num_Channel,f_s/N))-1; %backscattered signal (BPSK) %100x100
noise_Matrix = 1/sqrt(2)* (normrnd(0,sqrt(varNoise),num_Channel,f_s) + 1i*normrnd(0,sqrt(varNoise),num_Channel,f_s));%100x10000
%% AWGN
for kChannel = 1:num_Channel%100
kChannel
h = 1/sqrt(2)*(normrnd(0,1) + 1i*normrnd(0,1)); %normalized direct-link channel
f = 1/sqrt(2)*(normrnd(0,1) + 1i*normrnd(0,1)); %normalized TX-Tag channel
g = sqrt(0.5); %fixed Tag-C-RX channel
s = s_Matrix(kChannel,:);%%S-matrix:100x10000 ; S:1x10000
c = c_Matrix(kChannel,:);%c-matrix:100x100 ; c:1x100
noise = noise_Matrix(kChannel,:);%noise:1x10000
c_sample = reshape(repmat(c,N,1),1,f_s);%fs=1e4 thus,repmat(c,N,1):100x100;c-sample:1x10000
for kSNR = 1:length(SNR_dB)%length=11
p = P(kSNR);
y = sqrt(p)*h*s + sqrt(p)*f*alpha*g*s.*c_sample; %1x10000 received signal
y_std = sqrt(p)*h*s;
y = awgn(y,SNR_dB(kSNR),'measured');
y_std = awgn(y_std,SNR_dB(kSNR),'measured');
%%ML detection
%%fixed c=-1
s_detection_c1 = abs( repmat(y,4,1)- sqrt(p)*(h - alpha * g * f)* repmat(s_Alphabet,1,f_s));
[~,s_Est_c1_index] = min(s_detection_c1);
s_Est_c1 = exp(j*(mod(s_Est_c1_index-1,4)*pi/2+pi/4));
%%fixed c=1
s_detection_c2 = abs( repmat(y,4,1)- sqrt(p)*(h + alpha * g * f)* repmat(s_Alphabet,1,f_s));
[~,s_Est_c2_index] = min(s_detection_c2);
s_Est_c2 = exp(j*(mod(s_Est_c2_index-1,4)*pi/2+pi/4));
c_detection = abs([y-sqrt(p)*(h-alpha * g * f)*s_Est_c1; y-sqrt(p)*(h+ alpha * g * f)*s_Est_c2]).^2;
c_est_block1 = sqrt(sum(reshape(c_detection(1,:),N,f_s/N)));
c_est_block2 = sqrt(sum(reshape(c_detection(2,:),N,f_s/N)));
[~,c_Est_index] = min([c_est_block1;c_est_block2]);
c_Est = (c_Est_index-1)*2-1;
c_Est_sample = reshape(repmat(c_Est,N,1),1,f_s);%1x10000
s_detection = abs( repmat(y,4,1)- sqrt(p)*(h*repmat(s_Alphabet,1,f_s) + s_Alphabet*alpha * g * f*c_Est_sample));
[~,s_Est_index] = min(s_detection);
s_Est = exp(j*(mod(s_Est_index-1,4)*pi/2+pi/4));
Num_BER_s(kChannel,kSNR) = length(find(s-s_Est~=0));
Num_BER_c(kChannel,kSNR) = length(find(c-c_Est~=0));
end
end
num_BER_s = sum(Num_BER_s);
num_BER_c = sum(Num_BER_c);
BER_s = num_BER_s/num_Source_bit;
BER_c = num_BER_c/num_Tag_bit;
figure;
semilogy(SNR_dB,BER_s,'b-o')
hold on
semilogy(SNR_dB,BER_c,'r-s')
grid on
xlabel('SNR (dB)')
ylabel('BER')
legend('s(n)','c(n)')
save ML_Awgn.mat SNR_dB BER_s BER_c

 浙公网安备 33010602011771号
浙公网安备 33010602011771号