基于Levenberg-Marquardt算法的声源定位matlab仿真
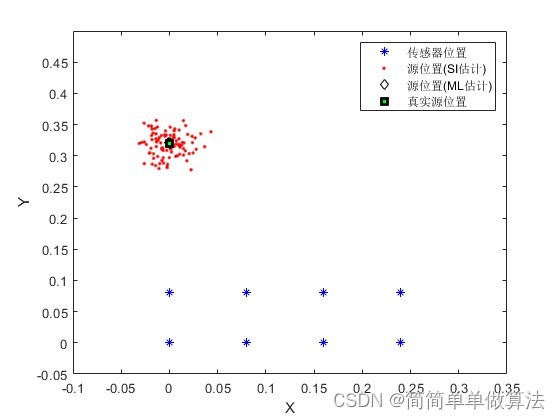
1.算法运行效果图预览
2.算法运行软件版本
matlab2022a
3.算法理论概述
Levenberg-Marquardt 算法是求非线性最小二乘问题的一种优化算法。它在不需要二阶导数信息的情况下,仍然可以取得相当不错的优化效果。它对于具有强非线性性和高维度的问题,尤为适用。
Levenberg-Marquardt 算法是在高斯-牛顿法和梯度下降法之间寻求一种折中的优化算法。在每一步迭代中,它使用高斯-牛顿法的近似 Hessian 矩阵,但是加上一个引入松弛性质的调节因子,这样可以大幅度减少病态问题的发生。同时,Levenberg-Marquardt 算法也采用了梯度下降法的思想,在 Hessian 矩阵无法更新或者接近于无法更新的时候,使用梯度下降法继续迭代。
Levenberg-Marquardt 算法的本质是在求解非线性最小二乘问题中,将误差平方和作为代价函数,找到一种参数的集合,使得该代价函数最小。在每一步迭代中,它通过计算代价函数的一阶导数和二阶导数,更新参数的值。对于 Hessian 矩阵接近奇异矩阵或者代价函数停滞不前的情况,它通过调节因子来提高二阶导数的稳定性。同时,为了防止过拟合,Levenberg-Marquardt 算法还采用了正则化的方法,用来处理噪声和异常点。
声源定位是一种通过声音来确定其来源的技术。它广泛应用于语音识别、音频信号处理、机器人听觉、生物医学影像处理等领域。
在声源定位中,基于Levenberg-Marquardt算法是一种常用的优化方法,它主要用于求解非线性最小二乘问题。其基本原理是通过迭代来优化目标函数,直到达到最优解。
一、Levenberg-Marquardt算法的基本原理
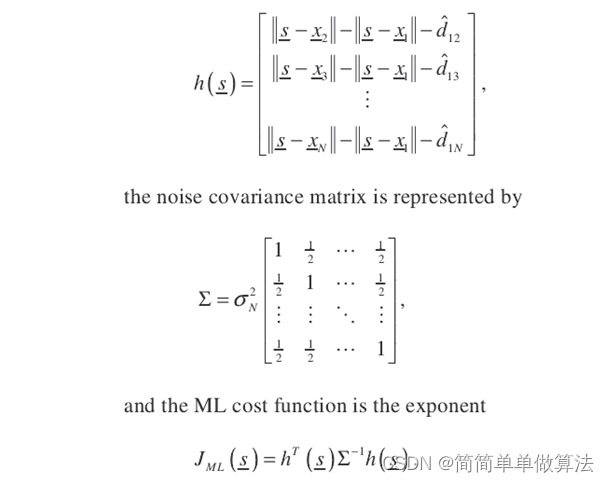
Levenberg-Marquardt算法是一种迭代方法,用于求解非线性最小二乘问题,它通过最小化目标函数与已知数据之间的差异来定位声源。
其基本原理是将目标函数与已知数据之间的差异定义为残差,然后通过迭代来最小化残差。在每次迭代中,根据当前估计的参数值,计算出残差的梯度,然后使用该梯度来更新参数。
Levenberg-Marquardt算法的优点在于它能够处理非线性问题,同时避免了大量的矩阵计算,因此适用于实时声源定位系统。
其基本原理如下:
在迭代过程中,需要根据具体情况调整阻尼因子λ的值,以确保算法的收敛速度和稳定性。一般来说,如果迭代次数过多或者收敛速度较慢,可以增大λ的值;如果迭代次数过少或者收敛速度过快,可以减小λ的值。
二、Levenberg-Marquardt算法的应用
在声源定位中,Levenberg-Marquardt算法可以应用于多种场景,例如:
语音识别:通过分析语音信号的特征,利用Levenberg-Marquardt算法确定说话人的位置;
音频信号处理:对音频信号进行特征提取和模型训练,再利用Levenberg-Marquardt算法优化模型参数;
机器人听觉:通过分析声音信号的空间分布,利用Levenberg-Marquardt算法确定声源在机器人坐标系下的位置;
生物医学影像处理:通过对医学影像进行分析和处理,利用Levenberg-Marquardt算法确定病灶的位置和大小。
总之,Levenberg-Marquardt算法在声源定位领域中具有广泛的应用前景。然而,在实际应用中还需要考虑其他因素,如噪声干扰、多径传播、信号衰减等,这些因素可能会影响定位精度和稳定性。因此,在实际应用中需要结合具体场景进行算法优化和实验验证。
4.部分核心程序
%ML
if (bML==1)
varxs_ML=var(bias_Xs_ML(:,1));
varys_ML=var(bias_Xs_ML(:,2));
varrs_ML=var(bias_Rs_ML);
varbear_ML=var(bias_bearing_ML);
vect_var_ML=[varxs_ML;varys_ML;varrs_ML;varbear_ML];
end
% Calculate second moment (RMS)= sqrt {E[a^2]} = sqrt {mean^2 + variance}
% -----------------------------------------------------
rmsxs_SI=sqrt(mean(bias_Xs_SI(:,1)).^2+varxs_SI);
rmsys_SI=sqrt(mean(bias_Xs_SI(:,2)).^2+varys_SI);
rmsrs_SI=sqrt(mean(bias_Rs_SI).^2+varrs_SI);
rmsbear_SI=sqrt(mean(bias_bearing_SI).^2+varbear_SI);
vect_rms_SI=[rmsxs_SI;rmsys_SI;rmsrs_SI;rmsbear_SI];
%ML
if (bML==1)
rmsxs_ML=sqrt(mean(bias_Xs_ML(:,1)).^2+varxs_ML);
rmsys_ML=sqrt(mean(bias_Xs_ML(:,2)).^2+varys_ML);
rmsrs_ML=sqrt(mean(bias_Rs_ML).^2+varrs_ML);
rmsbear_ML=sqrt(mean(bias_bearing_ML).^2+varbear_ML);
vect_rms_ML=[rmsxs_ML;rmsys_ML;rmsrs_ML;rmsbear_ML];
end
......................................................................
fisher=jacobian'*inv(cov_mat)*jacobian;
crlb= trace(fisher^-1); % compare with MSE of Rs
% -----------------------------------------------------
% Generate Plots
% -----------------------------------------------------
% hfig1=figure;
if (bML==1)
plot(xi, yi,'b*',Xs_SI(:,1), Xs_SI(:,2),'r.',Xs_ML(:,1), Xs_ML(:,2), 'kd'); % plot both SI and ML
hold on
plot(xs_src_actual, ys_src_actual,'rs','LineWidth',2,'MarkerEdgeColor','k','MarkerFaceColor','g','MarkerSize',6); % plot both SI and ML
else
plot(xi, yi,'bv', xs_src_actual, ys_src_actual, 'r^', Xs_SI(:,1), Xs_SI(:,2), 'mo'); % plot just SI only
end
if (bML==1)
legend('传感器位置', '源位置(SI估计)','源位置(ML估计)','真实源位置' );
else
legend('传感器位置', '真实源位置', '源位置(SI估计)');
end
xlabel('X');
ylabel('Y');
axis([-0.1,0.35,-0.05,0.5]);

 浙公网安备 33010602011771号
浙公网安备 33010602011771号