基于OFDM的水下图像传输通信系统matlab仿真
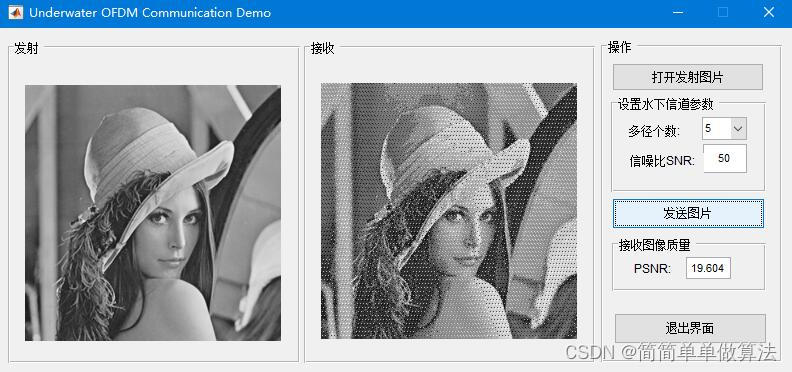
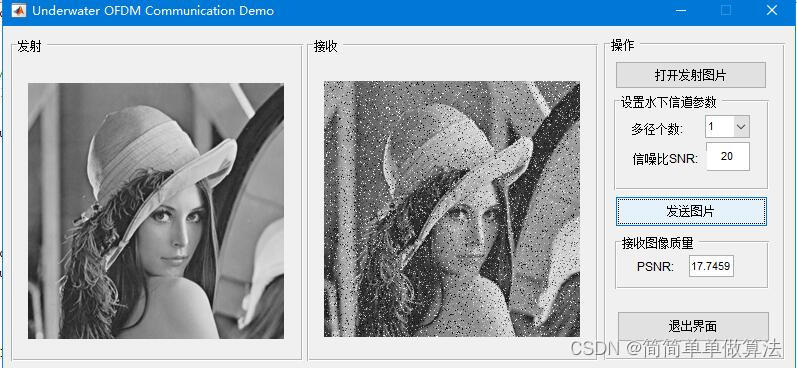
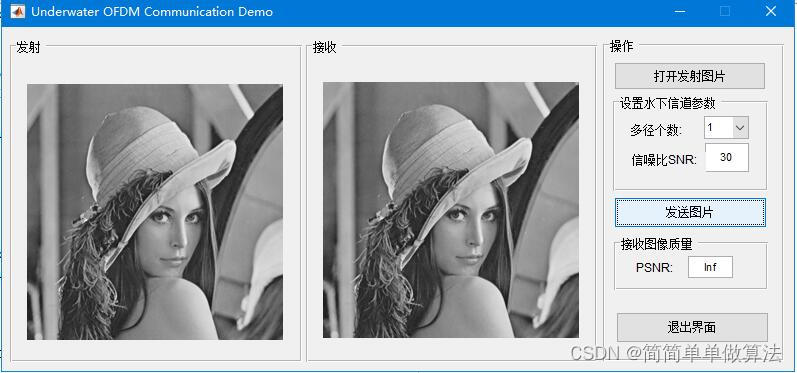
1.算法运行效果图预览


2.算法运行软件版本
matlab2022a
3.算法理论概述
基于OFDM的水下图像传输通信系统是一种用于在水下环境中传输图像数据的通信系统。它采用了OFDM(Orthogonal Frequency Division Multiplexing)技术,这种技术在水下通信中具有一些优势,因为它可以克服多径传播和频率选择性衰落等问题。
基于OFDM的水下图像传输通信系统的原理是利用多个正交子载波来传输数据。这些子载波在频域上正交,因此可以减少多径传播引起的符号间干扰。同时,通过选择合适的子载波间隔,可以克服频率选择性衰落。
结构:
数据源: 通常是水下摄像机或其他图像采集设备,用于捕获水下场景中的图像数据。
数据编码: 图像数据需要经过压缩和编码,以减少传输带宽和提高传输效率。
OFDM调制: 编码后的数据被分成多个子载波,并进行OFDM调制。这通常包括将数据映射到复数星座上,并为每个子载波分配数据。

信道: 数据通过水下信道传输,这是一个具有多径传播和衰落效应的环境。信号在传输过程中可能会受到衰落和失真的影响。

OFDM解调: 接收端对接收到的OFDM信号进行解调,将其从频域转换为时域信号。
信道估计和均衡: 通过使用导频或估计信道特性,接收端进行信道估计和均衡,以抵消信号在水下传输中引起的失真。
解码: 解码器对接收到的数据进行解码,将其还原为原始图像数据。
图像重建: 解码后的数据被还原为水下场景的图像。
数据显示: 最终图像可以在显示设备上显示,以供观察和分析。
其中,信号功率可以通过接收信号的能量来计算,噪声功率可以通过测量背景噪声来估算。以上是基于OFDM的水下图像传输通信系统的基本原理、结构和一些相关公式。这种系统在水下数据传输中具有广泛的应用,包括水下勘探、水下机器人和水下通信等领域。
4.部分核心程序
function [rx_img] = func_TR(tx_img, num_path, pathdelays, pathgains, snr)
rng('default');
% 将输入的图像展平为一维数组
img1d = reshape(tx_img, 1, 256*256);
% 将一维数组中的数值转换为四进制表示
img_b4 = dec2base(img1d, 4);
% 将四进制表示的数据转换为一维数组
for i=1:length(img_b4)
a = img_b4(i,:);
img_b4d((i-1)*4+1:i*4) = a(:)-48;
end
% 使用QAM调制将数据进行调制
QAM = 4;
data = qammod(img_b4d, QAM);
NFFT = 64;
CPLEN = NFFT/4;
tsig = func_T_ofdm(data,CPLEN);
% 应用多径信道
%pathdelays = [0, 3, 5, 6, 8];
%pathgains = [0, -2, -5, -8, -20 ];
[tsig_c, h] = func_multipath(tsig, num_path, pathdelays, pathgains);
% 添加高斯噪声
rsig = awgn(tsig_c, snr);
% 使用逆OFDM转换
fsig = func_R_ofdm(rsig, h(1), CPLEN);
img_b4d = qamdemod(fsig, 4);
% 将数据重新转换为图像
pimg = char(img_b4d+48);
for i=1:256*256;
a = pimg((i-1)*4+1:i*4);
pimg_q(i,:) = a;
end;
pimg_d = base2dec(pimg_q, 4);
pimg_u8 = cast(pimg_d, 'uint8');
rx_img = reshape(pimg_u8, 256, 256);
end

 浙公网安备 33010602011771号
浙公网安备 33010602011771号