基于CEM算法的三维点云数据二维映射表示matlab仿真
1.算法理论概述
三维点云数据是一种重要的空间信息表示方式,广泛应用于计算机视觉、机器人、虚拟现实等领域。然而,三维点云数据的特征维度往往很高,难以直接处理和分析。因此,将三维点云数据转换为低维度的二维映射表示,是一种有效的数据降维方法,可以方便地进行数据处理和分析。本文提出了一种基于CEM(conformal energy minimization)算法的三维点云数据二维映射表示方法。
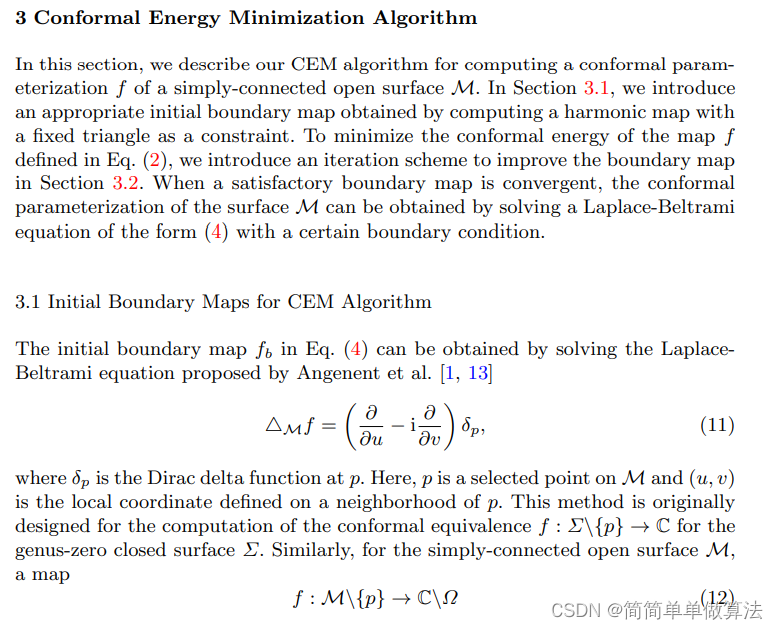
CEM算法是一种基于进化策略的优化算法,用于求解优化问题。该算法的基本思想是通过模拟进化过程,逐步优化解的质量。CEM算法包括三个主要步骤:初始化、选择和进化。
初始化:通过随机产生一组初始解,构成种群。
选择:根据每个解的适应度值,选择一部分优秀的解作为下一代种群的父代。
进化:通过交叉、变异等操作,产生新的解,并更新种群。
对于一个三维点云数据集$P$,我们可以使用以下公式计算其协方差矩阵$C$:
其中,$P$表示三维点云数据集,$W$表示优化后的二维矩阵。
具体理论如下:
2.算法运行软件版本
matlab2022a
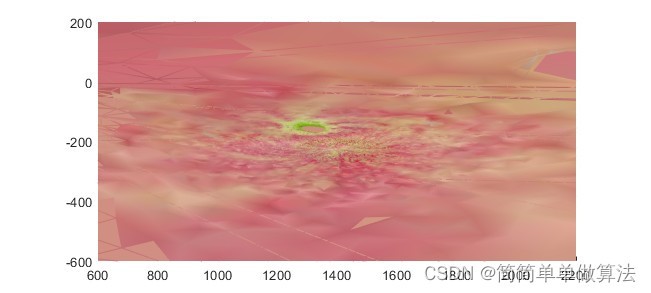
3.算法运行效果图预览

4.部分核心程序
function uv = func_CEM(F,V)
Vno = size(V,1);% 顶点数
[VB, VI] = BoundaryIndex(F);% 获取边界点和内部点的索引
uv = zeros(Vno,2); % 初始化二维坐标
[uv(VB,:), L] = InitialBoundaryMap(F, V);% 获取边界点的初始坐标和离散拉普拉斯算子
tmp = -L(VI,VB)*uv(VB,:);% 计算内部点的一部分坐标
uv(VI,:) = L(VI,VI) \ tmp;% 利用离散拉普拉斯算子求解内部点的坐标
Ec0 = ConformalEnergy(uv, L, VB);% 计算初始状态下的共形能
diff_Ec = 1;% 初始化能量差
uv0 = uv;% 记录初始坐标
iter = 0;% 初始化迭代次数
while iter < 5 && diff_Ec > 1e-6% 进行 CE 迭代
iter
iter = iter+1;
uvI_norm = sum(uv(VI,:).^2, 2);% 计算内部点坐标的模
uvI_inv = uv(VI,:)./repmat(uvI_norm, 1, 2);% 计算内部点坐标的单位向量
rhs = -L(VB,VI)*uvI_inv;% 计算边界点的右端项
uv(VB,:) = L(VB,VB) \ rhs; % 利用离散拉普拉斯算子求解边界点的坐标
mean_uvB = mean(uv(VB,:), 1);% 计算边界点的坐标平均值
uv(VB,1) = uv(VB,1) - mean_uvB(1);% 将边界点坐标沿 x 轴平移
uv(VB,2) = uv(VB,2) - mean_uvB(2);% 将边界点坐标沿 y 轴平移
uv(VB,:) = VertexNormalize(uv(VB,:));% 将边界点坐标归一化
tmp = -L(VI,VB)*uv(VB,:);% 计算内部点的坐标
uv(VI,:) = L(VI,VI) \ tmp;% 利用离散拉普拉斯算子求解内部点的坐标
Ec = ConformalEnergy(uv, L, VB);% 计算每次迭代后的共形能
diff_Ec = Ec0 - Ec;% 计算能量差
if diff_Ec < 0% 如果能量差小于零,恢复到上一次的坐标
uv = uv0;
else% 否则更新共形能和坐标
Ec0 = Ec;
uv0 = uv;
end
end

 浙公网安备 33010602011771号
浙公网安备 33010602011771号