基于affine+sift+GTM算法的图像配准和三维重建算法matlab仿真
1.算法理论概述
在计算机视觉和图像处理领域,图像配准和三维重建是两个重要的研究方向。图像配准是指将多幅图像中的同一场景进行对齐,使得它们在同一坐标系下,以便进行后续的图像处理和分析。三维重建则是指将多幅图像中的二维信息重建成三维信息,以便进行三维可视化和分析。本文将介绍基于affine+sift+GTM算法的图像配准和三维重建方法。
affine+sift+GTM算法是一种基于特征点匹配的图像配准和三维重建方法。该方法通过提取图像的SIFT特征点,将它们进行配准,然后利用GTM模型进行三维重建。具体实现步骤如下:
数据准备
准备多幅拍摄同一场景的图像,以及相应的摄像机参数,包括内参和外参等。
特征提取
从每幅图像中,提取出一组SIFT特征点。SIFT是一种局部特征描述符,它可以在不同尺度和旋转角度下提取出图像中的关键点,并计算出每个关键点的特征向量,用于表示该点的局部特征。SIFT特征点的提取可以使用OpenCV等开源库进行实现。
特征匹配
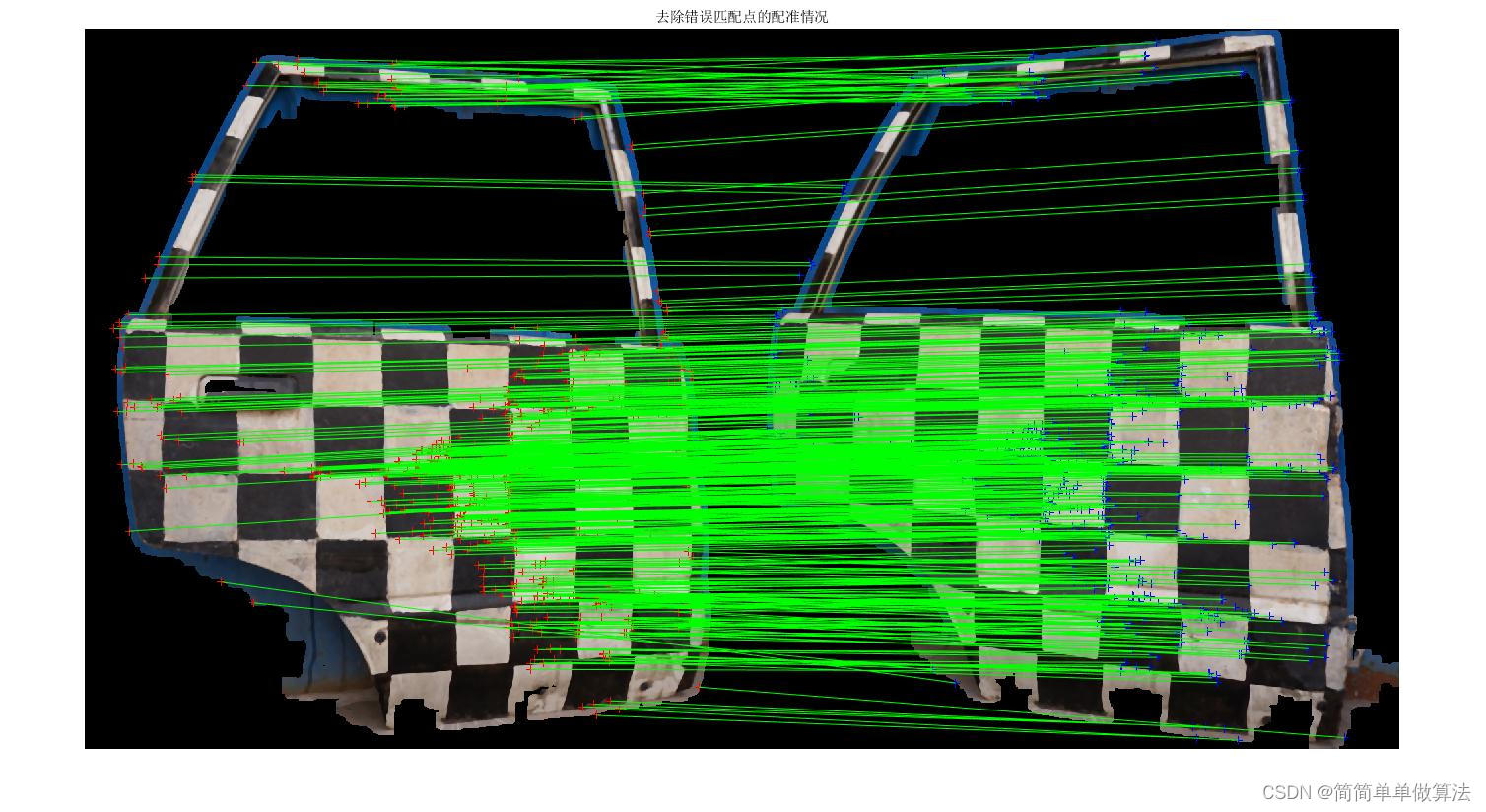
将每幅图像中的SIFT特征点进行匹配,以确定它们之间的对应关系。常用的特征匹配方法包括基于描述符距离的匹配、基于相似性度量的匹配等。匹配过程可以使用RANSAC等算法进行优化,以提高匹配的准确性。
相似变换
根据特征点的对应关系,计算出多幅图像之间的相似变换,以实现图像的配准。常用的相似变换包括仿射变换、透视变换等。在本方法中,采用仿射变换进行图像配准。
三维重建
根据配准后的图像,利用GTM模型进行三维重建。GTM模型是一种基于概率的统计模型,它可以将多幅图像中的二维信息重建成三维信息。具体实现步骤如下:
(1)定义GTM模型的参数,包括高斯混合数、隐变量维度等。
(2)根据配准后的图像,计算出每个像素点的深度值,并构造出一个深度图像。
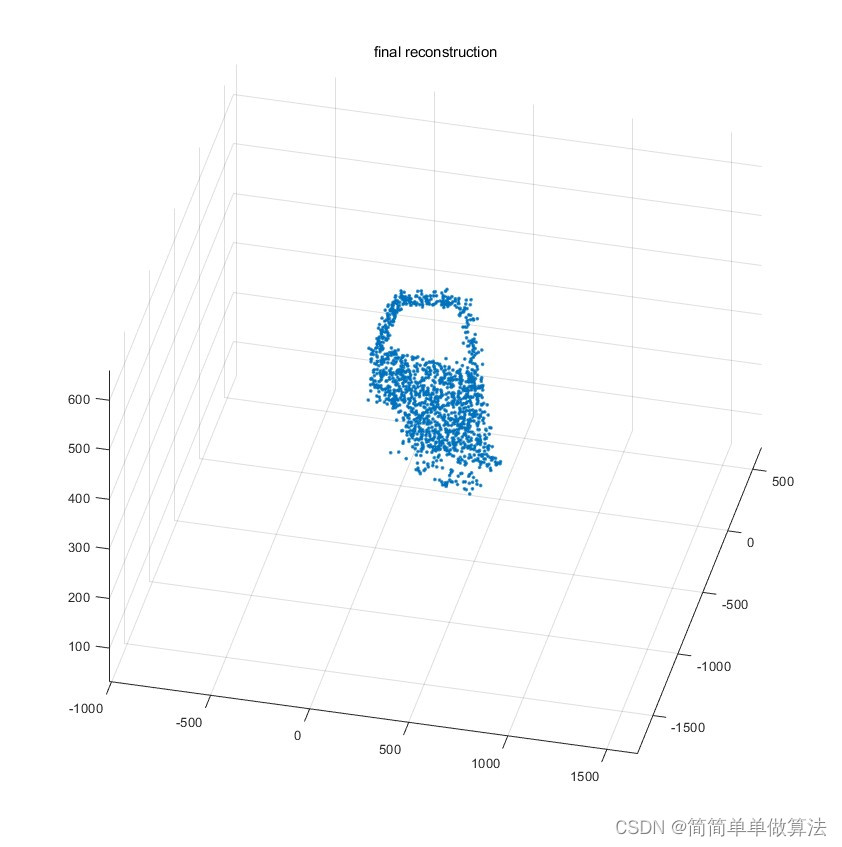
(3)将深度图像作为输入,利用GTM模型进行三维重建,得到一个三维点云模型。
三维可视化
将三维点云模型进行可视化,以便进行三维分析和处理。常用的三维可视化软件包括MeshLab、CloudCompare等。
下面给出affine+sift+GTM算法中常用的数学公式:
SIFT特征点描述符
SIFT特征点描述符是一种128维的向量,用于表示该点的局部特征。设该点的梯度方向直方图为h,共有16个方向,每个方向有8个bin,则SIFT特征点描述符为:
d = [h1,h2,...,h128]
其中,hi表示第i个bin的值。
仿射变换
仿射变换是一种线性变换,可以将一个二维图像变换到另一个二维图像。假设有一个二维点(x,y),经过仿射变换后得到的点(x',y')可以表示为:
[x' y' 1] = [x y 1] * A
其中,A是一个3*3的仿射变换矩阵,可以表示为:
A = [a11 a12 tx
a21 a22 ty
0 0 1]
其中,a11、a12、a21、a22表示缩放和旋转的参数,tx、ty表示平移的参数。
GTM模型
GTM模型是一种基于概率的统计模型,它可以将多幅图像中的二维信息重建成三维信息。假设有N个像素点,GTM模型可以表示为:
p(x) = 1/Z * sum(wj * N(x | μj,Σj))
其中,Z是归一化因子,w是权重,N(x | μj,Σj)表示多元高斯分布,μj和Σj分别表示第j个高斯分布的均值和协方差矩阵。
三维点云模型是由一组三维点构成的,在本方法中,可以表示为:
P = {(x1,y1,z1),(x2,y2,z2),...,(xn,yn,zn)}
其中,(xi,yi,zi)表示第i个三维点的坐标。
2.算法运行软件版本
MATLAB2017b
3.算法运行效果图预览
4.部分核心程序
% 定义图像缩放比例和阈值
SCALE = 5;
Threshold = 0.0000002;
%1输入2个图片
I1 = imread('pic\a1.jpg');
I2 = imread('pic\a2.jpg');
% 显示原始图像
figure;
subplot(421);
imshow(I1);title('原始图像');
subplot(422);
imshow(I2);title('原始图像');
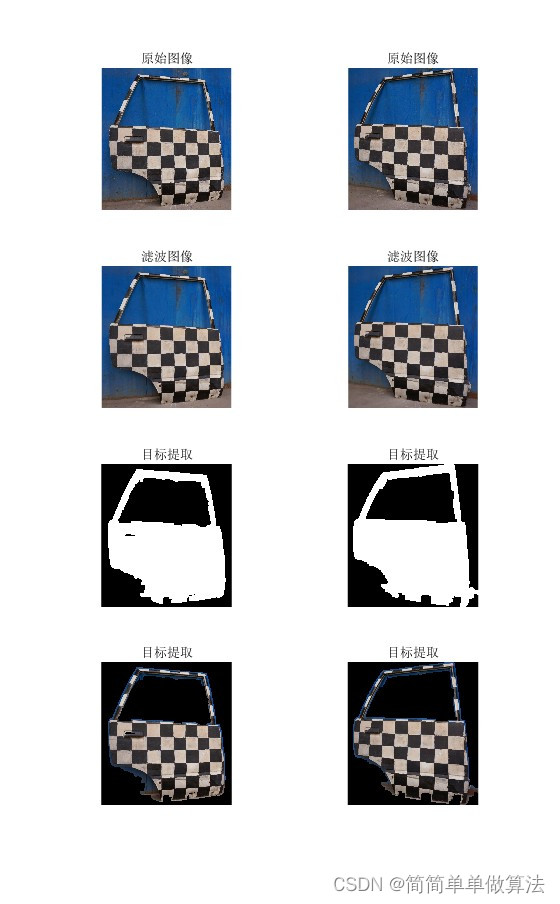
%2图像的预处理,比如增强,滤波,去背景等等,提取目标
I1f(:,:,1) = medfilt2(I1(:,:,1),[5,5]);
I1f(:,:,2) = medfilt2(I1(:,:,2),[5,5]);
I1f(:,:,3) = medfilt2(I1(:,:,3),[5,5]);
I2f(:,:,1) = medfilt2(I2(:,:,1),[5,5]);
I2f(:,:,2) = medfilt2(I2(:,:,2),[5,5]);
I2f(:,:,3) = medfilt2(I2(:,:,3),[5,5]);
subplot(423);
imshow(I1f);title('滤波图像');
subplot(424);
imshow(I2f);title('滤波图像');
[R,C,K] = size(I1f);
I1bg = zeros(R,C);
I2bg = zeros(R,C);
Thresh1 = 130;
Thresh2 = 70;
for i = 1:R
for j = 1:C
if I1f(i,j,1) >= Thresh1 & I1f(i,j,2) >= Thresh1 & I1f(i,j,3) >= Thresh1
I1bg(i,j) = 1;
end
if I1f(i,j,1) <= Thresh2 & I1f(i,j,2) <= Thresh2 & I1f(i,j,3) <= Thresh2
I1bg(i,j) = 1;
end
if I2f(i,j,1) >= Thresh1 & I2f(i,j,2) >= Thresh1 & I2f(i,j,3) >= Thresh1
I2bg(i,j) = 1;
end
if I2f(i,j,1) <= Thresh2 & I2f(i,j,2) <= Thresh2 & I2f(i,j,3) <= Thresh2
I2bg(i,j) = 1;
end
end
end
%去掉连通域小面积区域
I1bg = double(bwareaopen(I1bg,20000));
I2bg = double(bwareaopen(I2bg,20000));
SE=strel('square',20);
I1bgs = imdilate(I1bg,SE);%图像
I2bgs = imdilate(I2bg,SE);%图像
subplot(425);
imshow(I1bgs);title('目标提取');
subplot(426);
imshow(I2bgs);title('目标提取');
[R,C] = size(I1bg);
imgs1 = I1f;
imgs2 = I2f;
%根据提取出的目标,将图像中非目标区域置为0。
for i = 1:R
for j = 1:C
if I1bgs(i,j,1) == 0
imgs1(i,j,:) = 0;
end
if I2bgs(i,j,1) == 0
imgs2(i,j,:) = 0;
end
end
end
subplot(427);
imshow(imgs1);title('目标提取');
subplot(428);
imshow(imgs2);title('目标提取');
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%3目标的特征点检测和提取,
[F_1,Vp_1] = extractFeatures(rgb2gray(imgs1),detectKAZEFeatures(rgb2gray(imgs1),'Threshold',Threshold, 'NumOctaves',3,'NumScaleLevels',SCALE));
[F_2,Vp_2] = extractFeatures(rgb2gray(imgs2),detectKAZEFeatures(rgb2gray(imgs2),'Threshold',Threshold, 'NumOctaves',3,'NumScaleLevels',SCALE));
indexPairs = matchFeatures(F_1,F_2); %匹配提取出的特征点。
Mf_1 = Vp_1(indexPairs(:, 1));
Mp_1 = Mf_1.Location;
Mf_2 = Vp_2(indexPairs(:, 2));
Mp_2 = Mf_2.Location;
Images1all = Vp_1.Location;
Images2all = Vp_2.Location;
X1 = Mp_1;
X2 = Mp_2;
img1s = imgs1;
img2s = imgs2;
[r1,c1,k] = size(img1s);
[r2,c2,k] = size(img2s);
L1 = min(r1,r2);
L2 = min(c1,c2);
Step = 1;
Xs = X1(1:Step:end,1);
Ys = X1(1:Step:end,2);
Xe = X2(1:Step:end,1)+c1;
Ye = X2(1:Step:end,2);
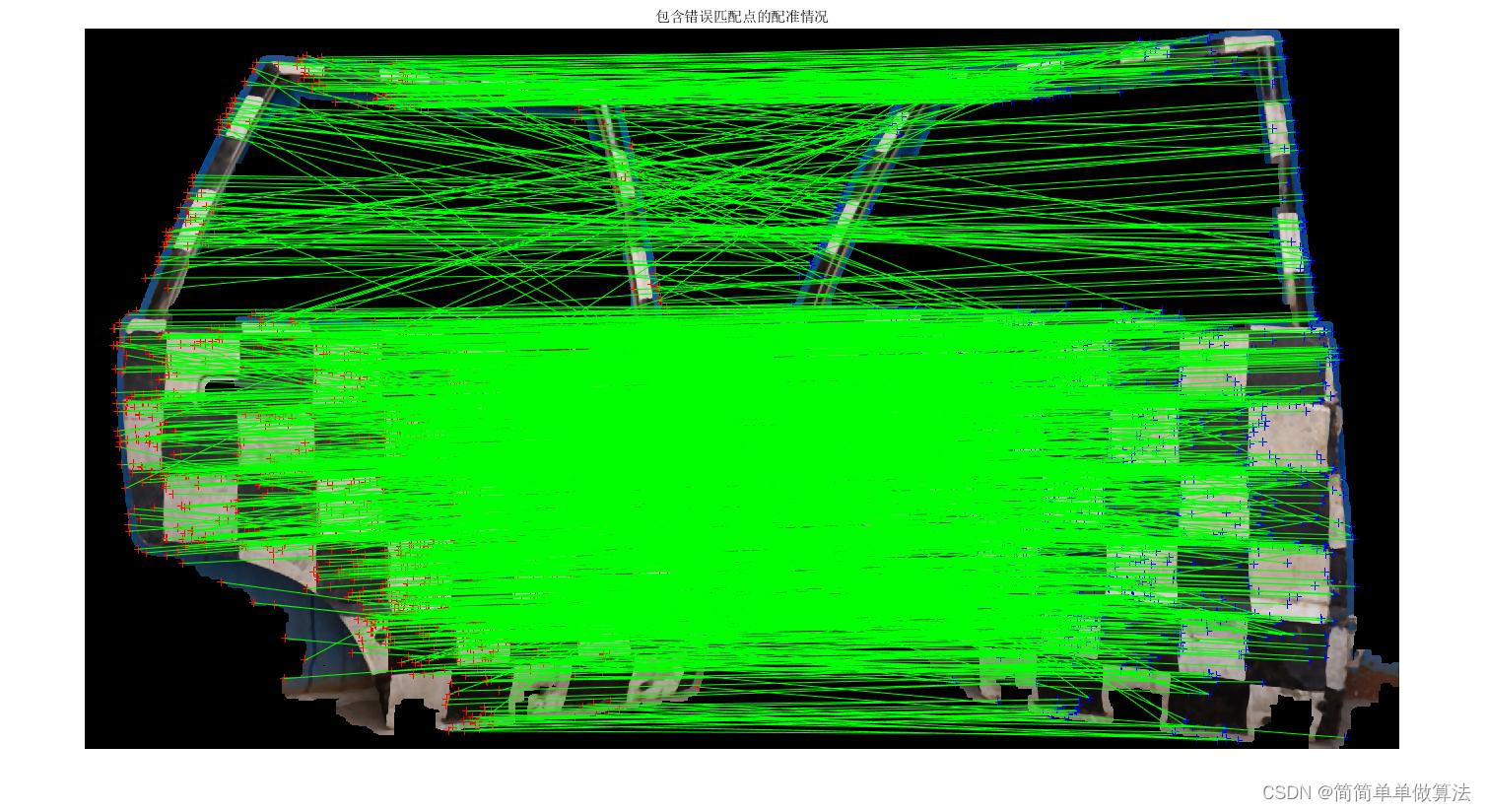
%去除错误配准点后的匹配效果显示匹配结果。
figure(2);
hIm = montage([(img1s(1:L1,1:L2,:)),(img2s(1:L1,1:L2,:))]);
img2s2 = img2s(1:L1,1:L2,:);
hold on;
plot(Xs,Ys,'r+');
hold on;
plot(Xe,Ye,'b+');
hold on
for i = 1:length(Xs)
line([Xs(i),Xe(i)],[Ys(i),Ye(i)],'color','g');
hold on
end
title('包含错误匹配点的配准情况');
save step1.mat imgs1 imgs2 Xs Ys Xe Ye c1 X1 X2 Images1all Images2all

 浙公网安备 33010602011771号
浙公网安备 33010602011771号