基于自适应ICP算法的三维模型配准matlab仿真
1.算法理论概述
三维模型配准是三维重建、三维建模、机器人视觉等领域中重要的基础问题。在三维模型配准中,自适应ICP算法是一种常用的配准算法,可以快速而准确地将多个三维模型进行配准和融合。本文将从专业角度详细介绍基于自适应ICP算法的三维模型配准算法,包括算法的实现步骤、数学公式及其推导过程等。
1.1、自适应ICP算法
自适应ICP算法是一种改进的迭代最近点算法(Iterative Closest Point,ICP),它通过自适应地选择最近邻点来提高配准的效率和鲁棒性。下面将介绍自适应ICP算法的实现步骤和相关数学公式。
1.实现步骤
自适应ICP算法的实现步骤如下:
(1)初始化:输入两个待配准的三维模型,分别是模型A和模型B,其中模型A是基准模型,模型B是需要与模型A对齐的模型。初始化变换矩阵T为单位矩阵。
(2)选择最近邻点:对于模型B中的每个点p,从模型A中选择最近的n个点作为参考点集,其中n是一个自适应的参数,可以根据实际情况进行调整。通过KD树等数据结构可以快速找到最近邻点。
(3)计算变换矩阵:使用ICP算法计算模型B中的点p与参考点集在模型A中对应的点的最优变换矩阵T',可以使用SVD等方法求解。
(4)更新变换矩阵:将变换矩阵T'与当前的变换矩阵T相乘,得到新的变换矩阵T。
(5)重复执行步骤2-4,直到满足收敛条件,例如变换矩阵的变化小于一个阈值或迭代次数达到预设值。
(6)输出结果:输出配准后的模型B的点云数据及其变换矩阵。
1.2.icp数学公式
(1)距离度量
(3)ICP变换矩阵的计算
基于自适应ICP算法的三维模型配准算法,包括算法的实现步骤和相关数学公式。自适应ICP算法通过自适应地选择最近邻点来提高配准的效率和鲁棒性,可以快速而准确地将多个三维模型进行配准和融合,是三维重建、三维建模、机器人视觉等领域中重要的基础问题之一。
2.算法运行软件版本
matlab2017b
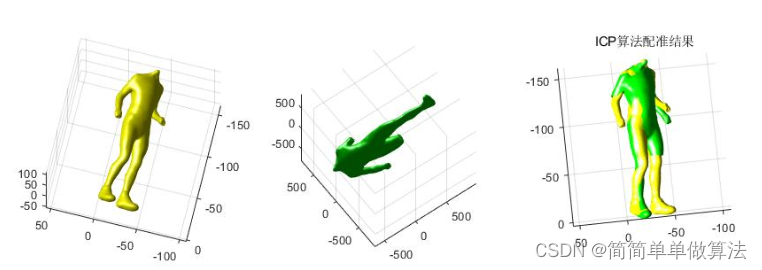
3.算法运行效果图预览

4.部分核心程序
function [error,Reallignedsource,transform,Derr]=rigidICP(target,source)
% 定义函数 rigidICP,输入参数为 target 和 source 两个点云数据,输出参数为 error、Reallignedsource、transform 和 Derr。
% target 和 source 都是 N3 大小的 3D 点云数据,其中 N 表示点云中点的个数,3 表示点云中每个点的坐标数。
% 函数的作用是将 source 点云旋转、平移和缩放,使其与 target 点云形状相似。
% 调用函数 Preall,对 target 和 source 进行预对齐操作
[Prealligned_source,Prealligned_target,transformtarget ]=Preall(target,source);
% 显示 'error'
display ('error')
errortemp(1,:)=0;% 初始化 errortemp 和 index
index=2;
% 调用函数 ICPmanu_allign2,进行迭代对齐操作,计算出 errortemp 和 Reallignedsourcetemp
[errortemp(index,:),Reallignedsourcetemp]=ICPmanu_allign2(Prealligned_target,Prealligned_source);
% 初始化 Derr 和 indxx
Derr = [];
indxx=0;
% 进行循环,直到 errortemp 达到收敛或循环次数达到上限
while ((abs(errortemp(index-1,:)-errortemp(index,:)))>1e-15 & indxx<200)
indxx=indxx+1;
[errortemp(index+1,:),Reallignedsourcetemp]=ICPmanu_allign2(Prealligned_target,Reallignedsourcetemp);
index=index+1;
d=errortemp(index,:)
Derr = [Derr,d];
end
% 计算 error 和 Reallignedsource,并调用函数 procrustes,计算出变换信息 transform
error=errortemp(index,:);
Reallignedsource=Reallignedsourcetemp*transformtarget.T+repmat(transformtarget.c(1,1:3),length(Reallignedsourcetemp(:,1)),1);
[d,Reallignedsource,transform] = procrustes(Reallignedsource,source);

 浙公网安备 33010602011771号
浙公网安备 33010602011771号