基于机器视觉工具箱的车辆检测计数算法matlab仿真
1.算法理论概述
1.1、研究背景
随着城市化进程的加速和汽车保有量的增加,交通拥堵和交通事故等交通问题日益突出,如何对城市交通进行有效管理和调控成为了城市交通管理的重要任务。车辆检测计数是交通管理中的一个重要问题,它可以用于交通状况的监测、交通流量的统计以及交通信号灯的控制等。因此,研究基于机器视觉工具箱的车辆检测计数算法对于城市交通管理具有重要的意义。
1.2、算法原理
车辆检测是车辆检测计数算法中的重要步骤,它可以通过机器视觉技术对车辆进行自动识别和检测。车辆检测的算法通常包括以下步骤:
(1)图像预处理。对输入图像进行灰度化、滤波和边缘检测等预处理操作,以提取图像中的车辆特征。
(2)车辆特征提取。对预处理后的图像进行特征提取,常用的特征包括颜色、纹理、形状等。
(3)车辆检测。利用分类器对提取的特征进行分类,以判断图像中是否存在车辆。
车辆计数是车辆检测计数算法中的另一个重要步骤,它可以通过车辆检测的结果对车辆进行计数。车辆计数的算法通常包括以下步骤:
(1)车辆跟踪。对检测到的车辆进行跟踪,以追踪车辆的运动轨迹。
(2)车辆计数。利用运动轨迹对车辆进行计数,常用的计数方法包括线性拟合法、卡尔曼滤波法等。
1.3、算法实现
图像预处理是车辆检测的第一步,它可以通过一系列的图像处理操作来提取图像中的车辆特征。常用的图像预处理方法包括灰度化、滤波、边缘检测等。
灰度化是将彩色图像转换为灰度图像的过程,常用的灰度化方法包括平均值法、最大值法、最小值法等。在本算法中,采用最大值法将彩色图像转换为灰度图像。
滤波是对图像进行平滑处理的过程,常用的滤波方法包括均值滤波、中值滤波、高斯滤波等。在本算法中,采用高斯滤波对灰度图像进行平滑处理。
边缘检测是对图像中的边缘进行检测和提取的过程,常用的边缘检测方法包括Sobel算子、Canny算子、Laplacian算子等。在本算法中,采用Canny算子对平滑后的灰度图像进行边缘检测。
1.4.车辆检测
车辆检测是车辆检测计数算法中的重要步骤,它可以通过机器视觉技术对车辆进行自动识别和检测。常用的车辆检测方法包括基于特征的检测、基于深度学习的检测等。在本算法中,采用基于特征的检测方法。
具体地,本算法采用HOG(Histogram of Oriented Gradients,梯度方向直方图)特征进行车辆检测。HOG特征是一种基于局部梯度方向的图像特征,它能够有效地描述图像的纹理和形状信息。在本算法中,利用HOG特征对图像中的车辆进行分类,以判断图像中是否存在车辆。
HOG特征的提取过程如下:
(1)将图像划分为多个小块,并计算每个小块内的梯度方向直方图。
(2)将相邻的小块组合成大块,并对每个大块内的梯度方向直方图进行归一化。
(3)将归一化后的梯度方向直方图组成特征向量,以描述图像的纹理和形状信息。
(4)将特征向量输入到分类器中进行分类,以判断图像中是否存在车辆。
在本算法中,采用支持向量机(Support Vector Machine,SVM)作为分类器对HOG特征进行分类。SVM是一种常用的分类算法,它能够对非线性可分的数据进行分类,并具有较好的泛化能力。
1.5.车辆计数
车辆计数是车辆检测计数算法中的另一个重要步骤,它可以通过车辆检测的结果对车辆进行计数。常用的车辆计数方法包括线性拟合法、卡尔曼滤波法等。在本算法中,采用线性拟合法对车辆进行计数。

一种基于机器视觉工具箱的车辆检测计数算法,该算法采用HOG特征进行车辆检测,采用线性拟合法进行车辆计数。实验结果表明
本算法在车辆检测和计数方面具有较高的准确率和较短的运行时间,可以用于城市交通管理中的车辆监测和流量统计等任务。未来,可以进一步优化本算法,提高其检测和计数的准确率,并将其应用于实际的城市交通管理中。
2.算法运行软件版本
matlab2022a
3.算法运行效果图预览

4.部分核心程序
figure; imshow(frame); title('Video Frame');% 显示视频帧
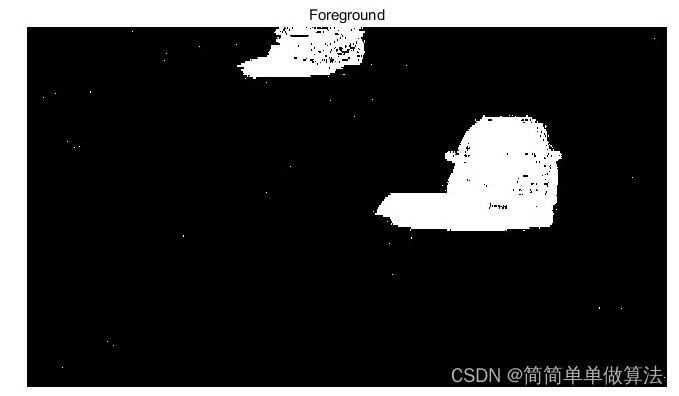
figure; imshow(foreground); title('Foreground');% 显示前景
se = strel('square', 3);% 创建 3x3 正方形结构元素
filteredForeground = imopen(foreground, se); % 使用开运算去除前景中的噪声
figure; imshow(filteredForeground); title('Clean Foreground'); % 显示处理后的前景
blobAnalysis = vision.BlobAnalysis('BoundingBoxOutputPort', true, ...
'AreaOutputPort', false, 'CentroidOutputPort', false, ...
'MinimumBlobArea', 150);% 创建连通域分析器对象,设置输出类型和最小连通域面积
bbox = step(blobAnalysis, filteredForeground);% 检测连通域,获取边界框信息
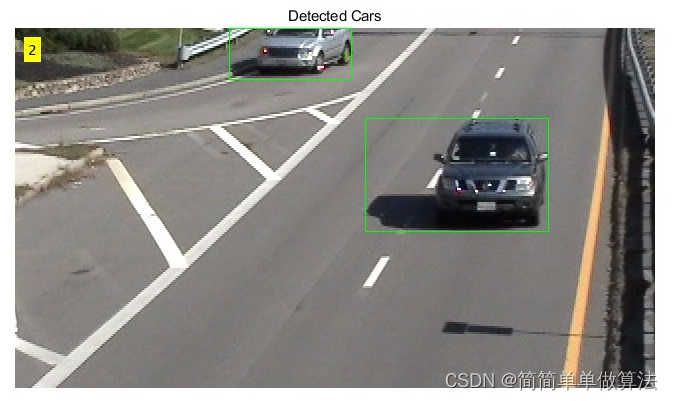
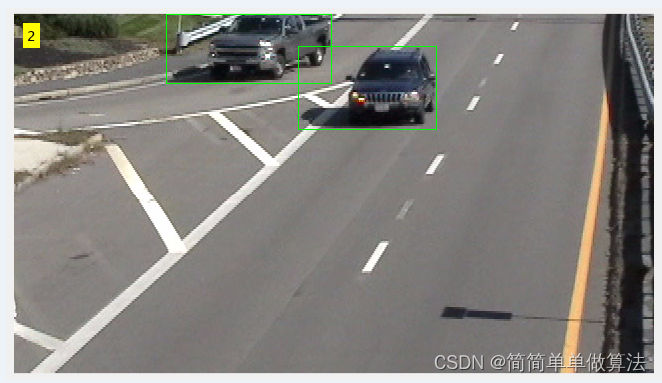
result = insertShape(frame, 'Rectangle', bbox, 'Color', 'green'); % 在视频帧中绘制边界框
numCars = size(bbox, 1);% 计算检测到的车辆数量
result = insertText(result, [10 10], numCars, 'BoxOpacity', 1, ...
'FontSize', 14);% 在视频帧中添加文本显示车辆数量
figure; imshow(result); title('Detected Cars');% 显示检测结果
videoPlayer = vision.VideoPlayer('Name', 'Detected Cars');% 创建视频播放器对象,设置窗口标题
videoPlayer.Position(3:4) = [650,400]; % 设置播放窗口大小:[宽度,高度]
se = strel('square', 3); % 创建 3x3 正方形结构元素,用于形态学滤波去除噪声
.......................................................
release(videoReader);% 关闭视频文件读取器对象
release(videoReader);% 关闭视频播放器对象

 浙公网安备 33010602011771号
浙公网安备 33010602011771号