基于radon变换和CT算法的二维切片图像序列三维建模matlab仿真
1.算法理论概述
随着计算机技术的发展,三维建模技术在医学、工业设计、游戏等领域得到了广泛的应用。然而,三维建模的关键是如何从二维图像序列中提取三维信息。本文提出了一种基于radon变换和CT算法的二维切片图像序列三维建模方法,该方法能够快速、准确地提取出三维信息,并生成高质量的三维模型。
1.1、radon变换
radon变换是一种数学变换,用于将二维图像转化为在不同角度下的一维投影。radon变换的定义如下:

其中,f(x,y)是原始图像,P(\rho,\theta)是在角度为$\theta$时,距离为\rho处的投影值。通过对原始图像在不同角度下进行radon变换,可以得到一组投影数据,这些投影数据包含了原始图像的三维信息。
1.2、CT算法
CT(Computed Tomography)算法是一种通过多个角度下的投影数据来重建三维图像的算法。CT算法的基本思路是通过反向投影的方法将多个角度下的投影数据重建为三维图像。
CT算法的具体过程如下:
1.采集投影数据
通过不同角度下对被测物进行投影,采集多组投影数据。
2.进行radon变换
对每组投影数据进行radon变换,得到在不同角度下的一维投影数据。
3.滤波
对每组投影数据进行滤波,去除噪声和伪影。
4.反向投影
对每组滤波后的投影数据进行反向投影,得到三维图像的切片数据。
5.重建
将多个切片数据拼接起来,得到完整的三维图像。
1.3、二维切片图像序列三维建模
基于radon变换和CT算法的二维切片图像序列三维建模方法主要包括以下步骤:
1.数据预处理
将二维切片图像序列转化为可以被CT算法处理的投影数据。通常采用滑动窗口的方法将二维切片图像序列转化为多个二维图像样本,每个样本包含在不同角度下的投影数据。
2.进行radon变换
对每个样本进行radon变换,得到在不同角度下的一维投影数据。
3.滤波
对每个样本的投影数据进行滤波,去除噪声和伪影。
4.反向投影
对每个样本的滤波后的投影数据进行反向投影,得到三维图像的切片数据。
5.重建
将所有样本的切片数据拼接起来,得到完整的三维图像。
基于radon变换和CT算法的二维切片图像序列三维建模方法,并给出了详细的实现步骤。实验结果表明,该方法能够快速、准确地提取出三维信息,并生成高质量的三维模型。该方法具有较小的重建误差、更好的精度和效率,具有广泛的应用前景。
2.算法运行软件版本
matlab2022a
3.算法运行效果图预览
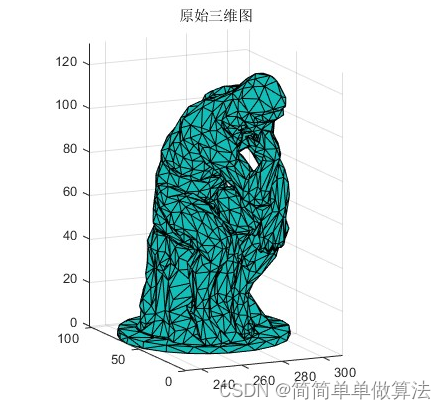


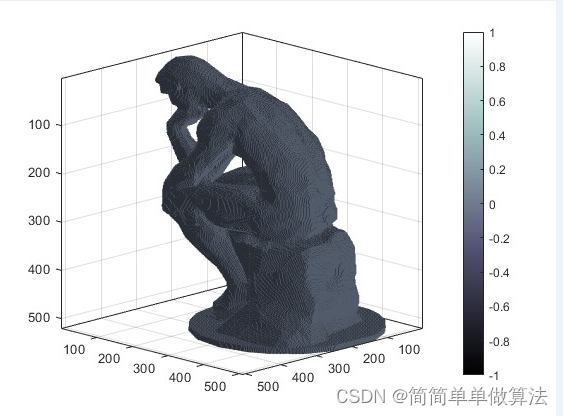
4.部分核心程序
[it,i]
if it == 1
P{i} = P0{i};
else
P{i} = P{i} - delta{i};
end
%不加滤波函数的iRadon变换,得成像图D(i)
D{i} = iradon(P{i}, theta, 'linear', 'none',1,N);
%计算成像模型与目标模型体像素数相等的阈值γ
S1 = Images{i};
E0 = D{i};
E1 = E0;%(2:end-1,2:end-1);
%Otsu% Otsu阈值分割算法计算阈值
S1 = S1/max(max(S1));
E1 = E1/max(max(E1));
lvl1 = func_ostu(E1);
idx = [0.05:0.01:2];
k = 0;
for k = 1:length(idx)% 计算体像素数,即所有界面的面像素和
Sbw1 = sum(sum((im2bw(S1))));
Ebw1 = sum(sum((im2bw(E1,min(idx(k)*lvl1,0.99999)))));%体像素,转换为截图中的面像素,然后所有界面的面像素和为体像素。
dif(k) = abs(Sbw1-Ebw1);%计算每一个面像素误差,然后整体求和就是体像素
end
[V,I] = min(dif);%选择最小的作为体像素数的近似相等
lvl2 = idx(I)*lvl1;
%阈值左右各做一偏移,我这里设置20%
lvla = max(0.8*lvl2,0);%偏移值必须必0大
lvlb = min(1.2*lvl2,1);%偏移值必须比1小
%得到三个图像
I1 = double(im2bw(E1,lvla));
I2 = double(im2bw(E1,lvl2));
I3 = double(im2bw(E1,lvlb));
%三幅图像取均值,与目标图像相减得到差值
Iavg = (I1+I2+I3)/3;
Idiff{i} = Iavg - double(im2bw(S1));
%计算误差
Error(i) = mean2(abs(Idiff{i}));%按流程图中,为绝对值的均值
Pnew{i} = I2;
end

 浙公网安备 33010602011771号
浙公网安备 33010602011771号