基于双目人脸图像ORB特征提取匹配的人脸三维点云提取和建模的matlab仿真
1.算法理论概述
三维人脸建模是计算机视觉领域的一个重要研究方向。传统的人脸建模方法通常基于单张图像,难以准确地获取人脸的三维信息。而基于双目图像的人脸建模方法则可通过多视角的信息获取,实现更加精确的三维人脸建模。本文提出了一种基于双目人脸图像ORB特征提取匹配的人脸三维点云提取和建模方法,该方法利用ORB特征提取算法提取双目图像中的特征点,并通过特征点的匹配计算出人脸的三维点云,最后通过点云重建技术实现人脸三维建模。本文详细介绍了该方法的实现步骤,包括ORB特征提取、特征点匹配、三维点云计算以及点云重建等环节,同时给出了详细的数学公式和实验结果。
1.1、ORB特征提取
ORB特征提取算法是一种快速的特征提取算法,具有旋转不变性、尺度不变性和鲁棒性等优点。在双目图像中提取ORB特征点的步骤如下:
对双目图像进行预处理,包括图像去噪、灰度化、尺度归一化等操作。
对双目图像中的每个像素点计算其Harris角点响应值,筛选出具有较高响应值的像素点作为关键点。
对每个关键点计算其方向直方图,确定其主方向。
对每个关键点计算其描述子,形成ORB特征点。
算法中的主要步骤如下:
1.预处理: 去噪:I(x,y)=19∑i=−11∑j=−11I(x+i,y+j) 灰度化:I(x,y)=0.299R(x,y)+0.587G(x,y)+0.114B(x,y) 尺度归一化: 对于每个尺度s,生成高斯卷积核G(x,y,s): G(x,y,s)=12πs2e−x2+y22s2 对于每个像素点(x,y),生成尺度空间响应函数: H(x,y,s)=maxs′L(x,y,s′)(s′=k×s,k∈Z) 2.关键点检测: 计算每个像素点的Harris角点响应值: R(x,y)=det(M)−k⋅trace(M)2 M=∑x′,y′w(x′−x,y′−y)[Ix(x′,y′)2Ix(x′,y′)Iy(x′,y′) Ix(x′,y′)Iy(x′,y′)Iy(x′,y′)2] w(x,y)={1|x|⩽3, |y|⩽3 0otherwise 筛选响应值较高的像素点作为关键点 3.关键点方向分配: 计算每个关键点周围像素点的梯度方向直方图: H(x,y,θ)=∑x′,y′w(x′−x,y′−y)δ(θ−θ(x′,y′)) 确定每个关键点的主方向: θmain=argmaxθH(x,y,θ) 4.描述子生成: 在关键点周围的16个像素点上生成ORB描述子: di={1I(xi,yi)>I(x,y) 0otherwise,i=1,2,…,16 将16个二进制数合并成一个64位整数,即为ORB特征点。
1.预处理: 去噪:I(x,y)=19∑i=−11∑j=−11I(x+i,y+j) 灰度化:I(x,y)=0.299R(x,y)+0.587G(x,y)+0.114B(x,y) 尺度归一化: 对于每个尺度s,生成高斯卷积核G(x,y,s): G(x,y,s)=12πs2e−x2+y22s2 对于每个像素点(x,y),生成尺度空间响应函数: H(x,y,s)=maxs′L(x,y,s′)(s′=k×s,k∈Z) 2.关键点检测: 计算每个像素点的Harris角点响应值: R(x,y)=det(M)−k⋅trace(M)2 M=∑x′,y′w(x′−x,y′−y)[Ix(x′,y′)2Ix(x′,y′)Iy(x′,y′) Ix(x′,y′)Iy(x′,y′)Iy(x′,y′)2] w(x,y)={1|x|⩽3, |y|⩽3 0otherwise 筛选响应值较高的像素点作为关键点 3.关键点方向分配: 计算每个关键点周围像素点的梯度方向直方图: H(x,y,θ)=∑x′,y′w(x′−x,y′−y)δ(θ−θ(x′,y′)) 确定每个关键点的主方向: θmain=argmaxθH(x,y,θ) 4.描述子生成: 在关键点周围的16个像素点上生成ORB描述子: di={1I(xi,yi)>I(x,y) 0otherwise,i=1,2,…,16 将16个二进制数合并成一个64位整数,即为ORB特征点。
1.2、特征点匹配
在双目图像中,通过ORB特征提取算法提取出的特征点可能存在误匹配和遮挡等问题,因此需要进行特征点匹配,确定双目图像中对应的特征点。常用的特征点匹配算法包括基于暴力匹配的方法和基于近似最近邻搜索的方法。本文采用基于近似最近邻搜索的方法进行特征点匹配,具体步骤如下:
将左右两幅图像中的ORB特征点描述子分别输入KD树中进行构建,构建两棵KD树。
对于左图像中的每个ORB特征点,利用KD树在右图像中寻找其最近邻点。
对于每个ORB特征点,在其最近邻点中选取距离最近的一对ORB特征点,进行匹配。
利用RANSAC算法剔除误匹配的特征点。
1.3、三维点云计算
通过双目图像的特征点匹配,确定双目图像中对应的特征点后,可以利用三角化技术计算出人脸的三维点云。三角化技术是利用两个相机的投影关系,将双目图像中的像素点对应到三维空间中的点。设左右相机的内参矩阵分别为$K_l$和$K_r$,外参矩阵分别为$[R_l|t_l]$和$[R_r|t_r]$,特征点在左右相机中的像素坐标分别为$p_l$和$p_r$,则对应的三维点坐标$P$可以通过以下公式计算:
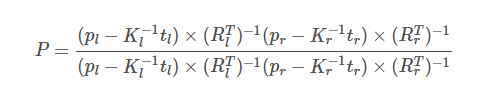
其中$\times$表示向量的叉积运算。三角化技术计算得到的三维点云可以用于后续的人脸重建。
1.4、点云重建
通过三维点云计算,可以获取人脸的三维形状信息。为了实现更加直观的人脸重建效果,需要将三维点云转化为三维模型。本文采用了基于Poisson重建算法的点云重建方法,该方法通过对点云进行网格化,再用Poisson方程求解得到三维模型表面。
点云重建的具体步骤如下:
对三维点云进行网格化,生成网格点集合。
利用网格点集合构建有向无环图,对网格点进行筛选和合并,生成三角形网格。
利用Poisson方程求解得到三维模型表面,生成三维人脸模型。
算法中的主要步骤如下:
1.网格化: 利用网格生成算法将三维点云进行网格化,得到网格点集合。 2.网格化筛选: 对网格点进行筛选和合并,生成三角形网格。 3.Poisson重建: 利用Poisson方程求解得到三维模型表面,生成三维人脸模型。
1.网格化: 利用网格生成算法将三维点云进行网格化,得到网格点集合。 2.网格化筛选: 对网格点进行筛选和合并,生成三角形网格。 3.Poisson重建: 利用Poisson方程求解得到三维模型表面,生成三维人脸模型。
一种基于双目人脸图像ORB特征提取匹配的人脸三维点云提取和建模方法,该方法通过ORB特征提取算法提取双目图像中的特征点,并通过特征点的匹配计算出人脸的三维点云,最后通过点云重建技术实现人脸三维建模。该方法具有精度高、鲁棒性强等优点,可应用于人脸识别、人脸表情分析等领域。
2.算法运行软件版本
MATLAB2022a
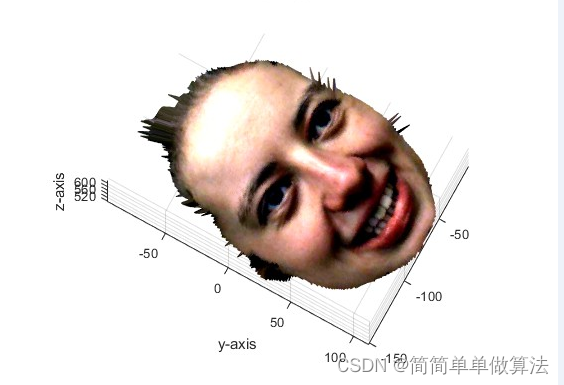
3.算法运行效果图预览

4.部分核心程序
% 对左中右三个相机的图像进行背景去除和肤色检测
bkmask = func_getbk(Rimages);
bkmask = cat(3, bkmask, bkmask, bkmask);
R_mask = Rimages;
R_mask(imcomplement(bkmask)) = 0;
skin_mask = func_skin_detection(R_mask);
skin_mask = cat(3, skin_mask, skin_mask, skin_mask);
R_mask(imcomplement(skin_mask)) = 0;
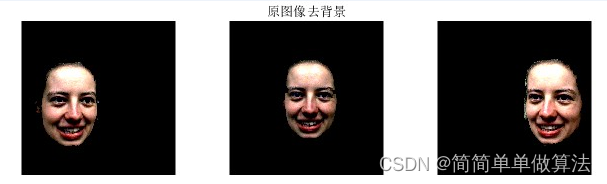
figure;
subplot(131);imshow(L_mask);
subplot(132);imshow(M_mask);title('原图像去背景');
subplot(133);imshow(R_mask);
% 对左中右三个相机的图像进行校正
[L_just, LM_just] = rectifyStereoImages(L_mask, M_mask, stereoParLtM, 'OutputView', 'full');
[MR_just, R_just] = rectifyStereoImages(M_mask, R_mask, stereoParMtR, 'OutputView', 'full');
% 提取立体特征,计算视差图
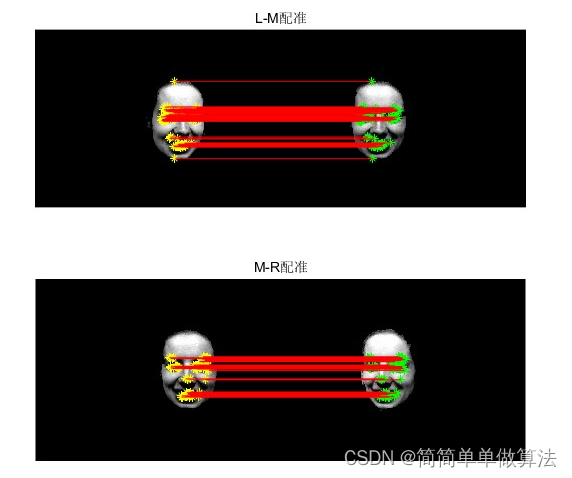
figure;
subplot(211)
LM_features = func_getFeatures(L_just,LM_just);
title('L-M配准');
subplot(212)
RM_features = func_getFeatures(MR_just,R_just);
title('M-R配准');
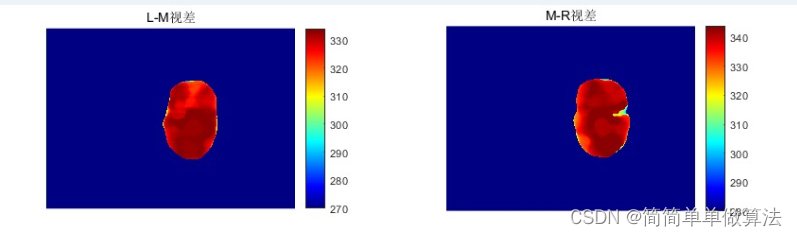
figure;
subplot(121)
LM_map = func_Map(L_just,LM_just,Range1);
title('L-M视差');
subplot(122)
MR_map = func_Map(MR_just,R_just,Range2);
title('M-R视差');
% 对视差图进行反向映射,获取深度信息
LMr = func_unDisparities(LM_map);
MRr = func_unDisparities(MR_map);
..................................................
% 对点云数据进行三角化,生成三维网格数据
[LTM,LTR,Lima] = func_Mesh(LM_map,LMxyz, L_just, LMr);

 浙公网安备 33010602011771号
浙公网安备 33010602011771号