基于LSTM网络的视觉识别研究与实现——简化版
1.问题描述:
以人脸图像的视觉识别为研究对象,研究了基于LSTM长短期记忆单元网络的视觉识别算法,通过使用卷积神经网络学习人脸图像的特征信息,然后使用LSTM网络建立序列知识,并生成描述性的句子,作为特征序列,建立一种基于句子描述的LSTM网络的视觉识别算法,最后通过MATLAB对该算法进行了仿真验证,对于不同姿态,不同干扰因素影响下的目标图像,本文所提出的基于LSTM的视觉识别正确率可以达到76%以上。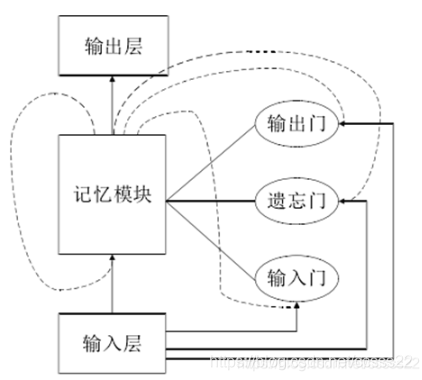
2.部分程序:
function nn = func_LSTM(train_x,train_y,test_x,test_y);
binary_dim = 8;
largest_number = 2^binary_dim - 1;
binary = cell(largest_number, 1);
for i = 1:largest_number + 1
binary{i} = dec2bin(i-1, binary_dim);
int2binary{i} = binary{i};
end
%input variables
alpha = 0.000001;
input_dim = 2;
hidden_dim = 32;
output_dim = 1;
%initialize neural network weights
%in_gate = sigmoid(X(t) * U_i + H(t-1) * W_i)
U_i = 2 * rand(input_dim, hidden_dim) - 1;
W_i = 2 * rand(hidden_dim, hidden_dim) - 1;
U_i_update = zeros(size(U_i));
W_i_update = zeros(size(W_i));
%forget_gate = sigmoid(X(t) * U_f + H(t-1) * W_f)
U_f = 2 * rand(input_dim, hidden_dim) - 1;
W_f = 2 * rand(hidden_dim, hidden_dim) - 1;
U_f_update = zeros(size(U_f));
W_f_update = zeros(size(W_f));
%out_gate = sigmoid(X(t) * U_o + H(t-1) * W_o)
U_o = 2 * rand(input_dim, hidden_dim) - 1;
W_o = 2 * rand(hidden_dim, hidden_dim) - 1;
U_o_update = zeros(size(U_o));
W_o_update = zeros(size(W_o));
%g_gate = tanh(X(t) * U_g + H(t-1) * W_g)
U_g = 2 * rand(input_dim, hidden_dim) - 1;
W_g = 2 * rand(hidden_dim, hidden_dim) - 1;
U_g_update = zeros(size(U_g));
W_g_update = zeros(size(W_g));
out_para = 2 * zeros(hidden_dim, output_dim) ;
out_para_update = zeros(size(out_para));
% C(t) = C(t-1) .* forget_gate + g_gate .* in_gate
% S(t) = tanh(C(t)) .* out_gate
% Out = sigmoid(S(t) * out_para)
%train
iter = 9999; % training iterations
for j = 1:iter
% generate a simple addition problem (a + b = c)
a_int = randi(round(largest_number/2)); % int version
a = int2binary{a_int+1}; % binary encoding
b_int = randi(floor(largest_number/2)); % int version
b = int2binary{b_int+1}; % binary encoding
% true answer
c_int = a_int + b_int; % int version
c = int2binary{c_int+1}; % binary encoding
% where we'll store our best guess (binary encoded)
d = zeros(size(c));
% total error
overallError = 0;
% difference in output layer, i.e., (target - out)
output_deltas = [];
% values of hidden layer, i.e., S(t)
hidden_layer_values = [];
cell_gate_values = [];
% initialize S(0) as a zero-vector
hidden_layer_values = [hidden_layer_values; zeros(1, hidden_dim)];
cell_gate_values = [cell_gate_values; zeros(1, hidden_dim)];
% initialize memory gate
% hidden layer
H = [];
H = [H; zeros(1, hidden_dim)];
% cell gate
C = [];
C = [C; zeros(1, hidden_dim)];
% in gate
I = [];
% forget gate
F = [];
% out gate
O = [];
% g gate
G = [];
% start to process a sequence, i.e., a forward pass
% Note: the output of a LSTM cell is the hidden_layer, and you need to
for position = 0:binary_dim-1
% X ------> input, size: 1 x input_dim
X = [a(binary_dim - position)-'0' b(binary_dim - position)-'0'];
% y ------> label, size: 1 x output_dim
y = [c(binary_dim - position)-'0']';
% use equations (1)-(7) in a forward pass. here we do not use bias
in_gate = sigmoid(X * U_i + H(end, :) * W_i); % equation (1)
forget_gate = sigmoid(X * U_f + H(end, :) * W_f); % equation (2)
out_gate = sigmoid(X * U_o + H(end, :) * W_o); % equation (3)
g_gate = tanh(X * U_g + H(end, :) * W_g); % equation (4)
C_t = C(end, :) .* forget_gate + g_gate .* in_gate; % equation (5)
H_t = tanh(C_t) .* out_gate; % equation (6)
% store these memory gates
I = [I; in_gate];
F = [F; forget_gate];
O = [O; out_gate];
G = [G; g_gate];
C = [C; C_t];
H = [H; H_t];
% compute predict output
pred_out = sigmoid(H_t * out_para);
% compute error in output layer
output_error = y - pred_out;
% compute difference in output layer using derivative
% output_diff = output_error * sigmoid_output_to_derivative(pred_out);
output_deltas = [output_deltas; output_error];
% compute total error
overallError = overallError + abs(output_error(1));
% decode estimate so we can print it out
d(binary_dim - position) = round(pred_out);
end
% from the last LSTM cell, you need a initial hidden layer difference
future_H_diff = zeros(1, hidden_dim);
% stare back-propagation, i.e., a backward pass
% the goal is to compute differences and use them to update weights
% start from the last LSTM cell
for position = 0:binary_dim-1
X = [a(position+1)-'0' b(position+1)-'0'];
% hidden layer
H_t = H(end-position, :); % H(t)
% previous hidden layer
H_t_1 = H(end-position-1, :); % H(t-1)
C_t = C(end-position, :); % C(t)
C_t_1 = C(end-position-1, :); % C(t-1)
O_t = O(end-position, :);
F_t = F(end-position, :);
G_t = G(end-position, :);
I_t = I(end-position, :);
% output layer difference
output_diff = output_deltas(end-position, :);
% H_t_diff = (future_H_diff * (W_i' + W_o' + W_f' + W_g') + output_diff * out_para') ...
% .* sigmoid_output_to_derivative(H_t);
% H_t_diff = output_diff * (out_para') .* sigmoid_output_to_derivative(H_t);
H_t_diff = output_diff * (out_para') .* sigmoid_output_to_derivative(H_t);
% out_para_diff = output_diff * (H_t) * sigmoid_output_to_derivative(out_para);
out_para_diff = (H_t') * output_diff;
% out_gate diference
O_t_diff = H_t_diff .* tanh(C_t) .* sigmoid_output_to_derivative(O_t);
% C_t difference
C_t_diff = H_t_diff .* O_t .* tan_h_output_to_derivative(C_t);
% forget_gate_diffeence
F_t_diff = C_t_diff .* C_t_1 .* sigmoid_output_to_derivative(F_t);
% in_gate difference
I_t_diff = C_t_diff .* G_t .* sigmoid_output_to_derivative(I_t);
% g_gate difference
G_t_diff = C_t_diff .* I_t .* tan_h_output_to_derivative(G_t);
% differences of U_i and W_i
U_i_diff = X' * I_t_diff .* sigmoid_output_to_derivative(U_i);
W_i_diff = (H_t_1)' * I_t_diff .* sigmoid_output_to_derivative(W_i);
% differences of U_o and W_o
U_o_diff = X' * O_t_diff .* sigmoid_output_to_derivative(U_o);
W_o_diff = (H_t_1)' * O_t_diff .* sigmoid_output_to_derivative(W_o);
% differences of U_o and W_o
U_f_diff = X' * F_t_diff .* sigmoid_output_to_derivative(U_f);
W_f_diff = (H_t_1)' * F_t_diff .* sigmoid_output_to_derivative(W_f);
% differences of U_o and W_o
U_g_diff = X' * G_t_diff .* tan_h_output_to_derivative(U_g);
W_g_diff = (H_t_1)' * G_t_diff .* tan_h_output_to_derivative(W_g);
% update
U_i_update = U_i_update + U_i_diff;
W_i_update = W_i_update + W_i_diff;
U_o_update = U_o_update + U_o_diff;
W_o_update = W_o_update + W_o_diff;
U_f_update = U_f_update + U_f_diff;
W_f_update = W_f_update + W_f_diff;
U_g_update = U_g_update + U_g_diff;
W_g_update = W_g_update + W_g_diff;
out_para_update = out_para_update + out_para_diff;
end
U_i = U_i + U_i_update * alpha;
W_i = W_i + W_i_update * alpha;
U_o = U_o + U_o_update * alpha;
W_o = W_o + W_o_update * alpha;
U_f = U_f + U_f_update * alpha;
W_f = W_f + W_f_update * alpha;
U_g = U_g + U_g_update * alpha;
W_g = W_g + W_g_update * alpha;
out_para = out_para + out_para_update * alpha;
U_i_update = U_i_update * 0;
W_i_update = W_i_update * 0;
U_o_update = U_o_update * 0;
W_o_update = W_o_update * 0;
U_f_update = U_f_update * 0;
W_f_update = W_f_update * 0;
U_g_update = U_g_update * 0;
W_g_update = W_g_update * 0;
out_para_update = out_para_update * 0;
end
3 部分仿真图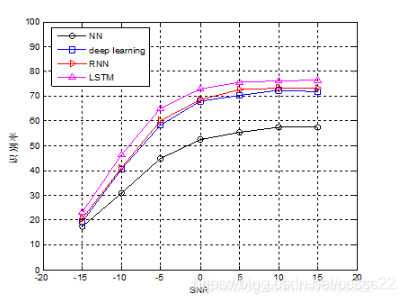
A-05-40

 浙公网安备 33010602011771号
浙公网安备 33010602011771号