会员
周边
众包
新闻
博问
闪存
赞助商
所有博客
当前博客
我的博客
我的园子
账号设置
简洁模式
...
退出登录
注册
登录
mashuai 的博客(base成都)
学习,记录,并祝愿家人都健康平安
博客园
首页
新随笔
联系
订阅
管理
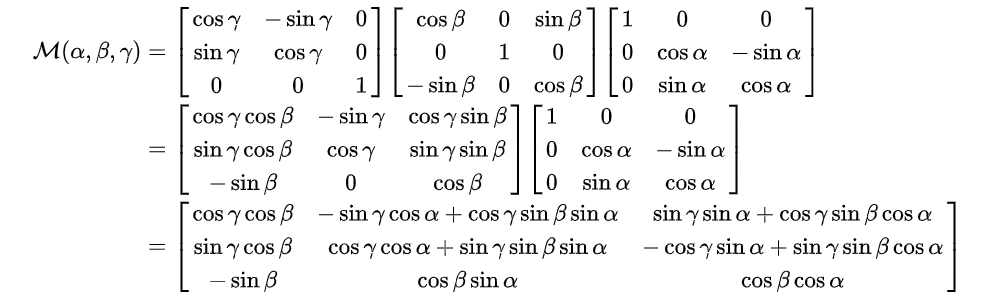
坐标系变换
旋转矩阵的欧拉角表示:
Ref:
坐标旋转变换公式的推导
坐标系旋转后的点坐标、坐标点旋转后的点坐标
、
3维旋转矩阵推导与助记
转载请注明出处 http://www.cnblogs.com/mashuai-191/
posted @
2021-04-21 10:13
mashuai_191
阅读(
245
) 评论(
0
)
编辑
收藏
举报
刷新页面
返回顶部
公告