
Coursera self-driving2, State Estimation and Localization Week2, kalman filter 卡尔曼滤波
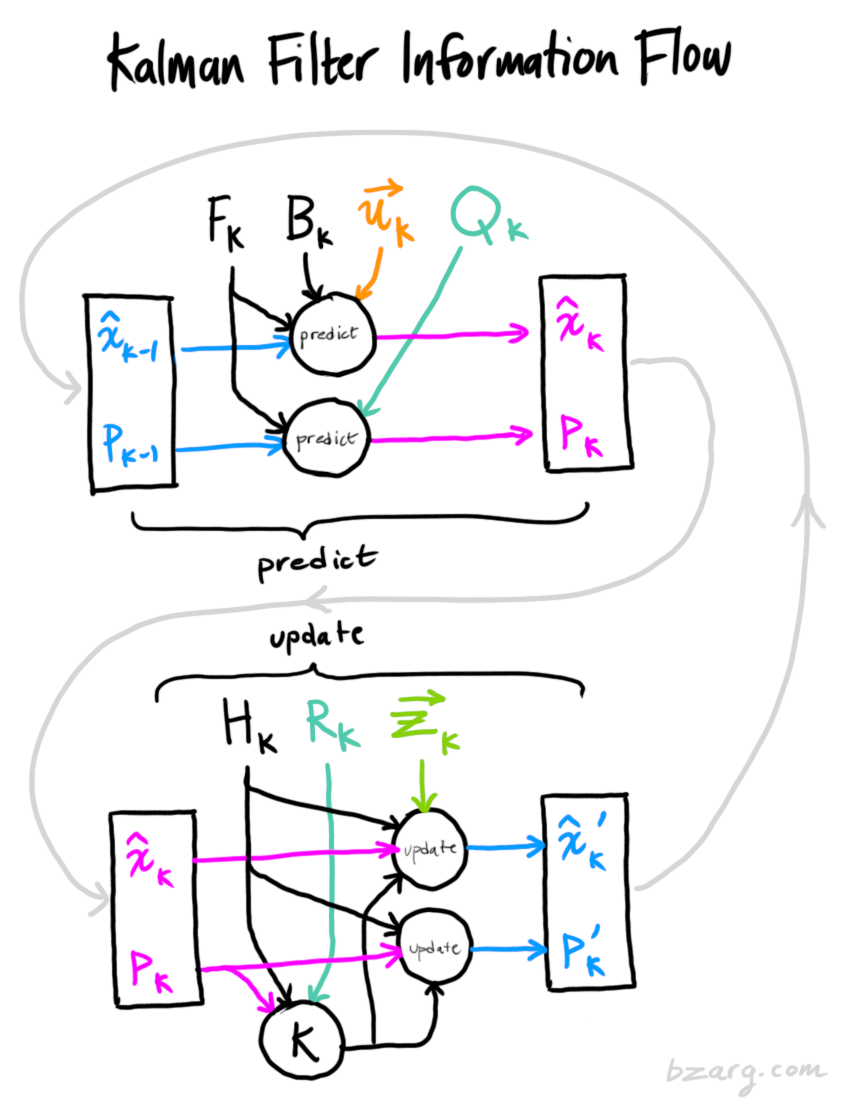
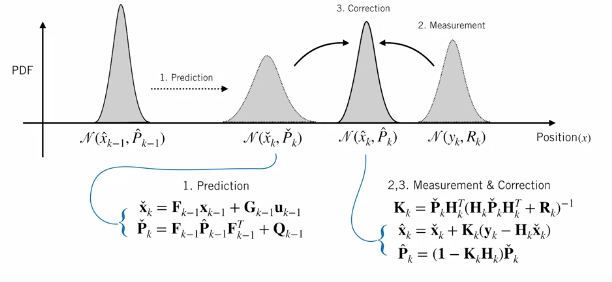
KF - Kalman Filter:
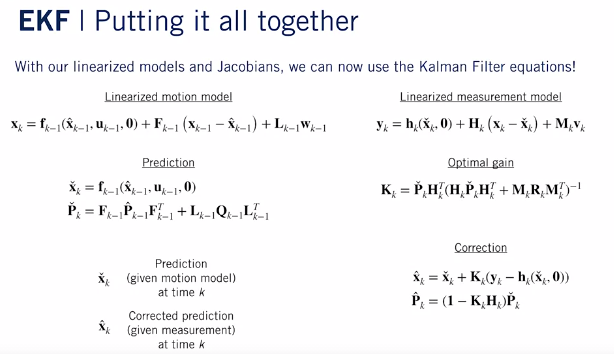
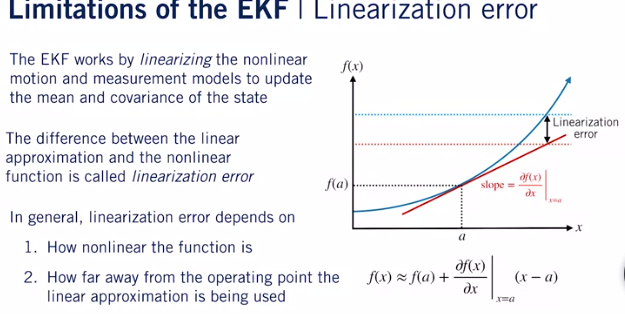
EKF - Extended Kalman Filter:
ES-EKF - Error State Extended Kalman Filter
和EKF一样,用的是 local linearization

EKF的限制:系统非常的非线性,用线性模拟很不准确. 作者举例极坐标转成笛卡尔坐标就是一种很不线性化的转换,用线性模拟就不行,不收敛
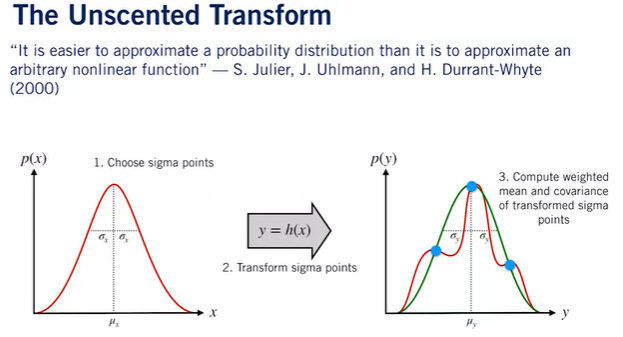
Unscented Kalman Filter - UKF
这个就是解决上面的问题的, 它更精确,而且不需要算jacobian矩阵
Summary:

Ref:
- http://www.bzarg.com/p/how-a-kalman-filter-works-in-pictures/ 图文并茂好文章, amazing!!!
- 最小二乘法的本质是什么?
转载请注明出处 http://www.cnblogs.com/mashuai-191/
