说人话搞懂【极大似然估计】和【最大后验概率】的区别!
什么是先验/后验概率
我们先给出一些符号定义,令\(\theta\)表示模型参数,\(D\)表示数据。
先验概率比较好理解,比如 \(p(D)\)就表示数据的先验概率(prior probability)。
但是在之前我经常搞不明白 \(p(D|\theta)\) 和\(p(\theta|D)\) 哪个才是后验概率(posterior probability)。其实二者都可以看做是后验概率,只不过少了定语。具体来说 \(p(D|\theta)\) 是数据 \(D\) 的后验概率,即已经告诉你模型参数 \(\theta\) 了,要你求数据的概率,所以是后验概率。同理\(p(\theta|D)\) 是告诉你数据后,让你求\(\theta\)的后验概率。所以,要根据语境去判断哪个才是后验概率。
似然概率
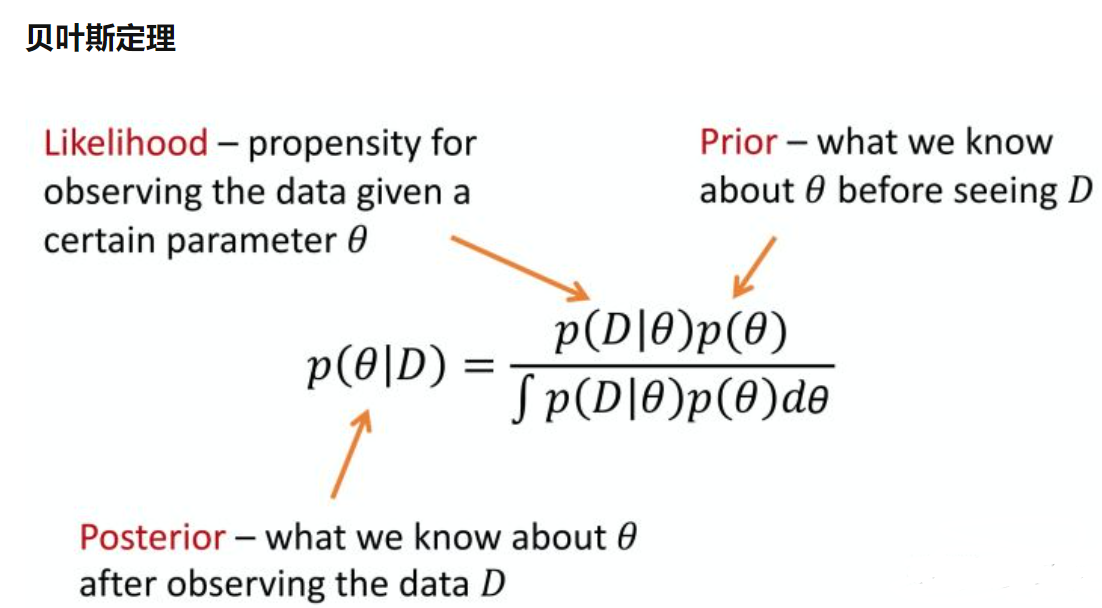
下面介绍一下贝叶斯公式这个老朋友了,或者说是熟悉的陌生人。
假设我们研究的对象是变量\(\theta\),那么此时先验概率就是 \(p(\theta)\),(\(\theta\)的) 后验概率是\(p(\theta|D)\)。
那\(p(D|\theta)\) 是什么呢?它就是本文的另一个主角:似然概率 (likelihood probability),顾名思义是给定参数\(\theta\),求数据是\(D\)的概率是多少;另一种理解是似然概率是要求出\(\theta\)在什么情况下能够使得数据\(D\)出现的概论最大。以神经网络模型优化为例,假设当前的输入图像是猫,那么我们要求出什么样的参数值\(\theta\)才能使得模型在猫这个类别上的预测概率最大。
一般来说 \(p(\theta)\)是不知道的或者说很难求解,但是我们可以知道后验概率和 (似然概率乘以先验概率)呈正相关关系,所以\(p(\theta)\)即使不知道也不影响对后验概率的求解。
极大似然估计 与 最大后验概率估计
极大似然估计 (Maximum Likelihood Estimate, MLE)和最大后验概率估计(Maximum A Posteriori (MAP) estimation)其实是两个不同学派的方法论。
MLE是频率学派模型参数估计的常用方法,它的目的是想最大化已经发生的事情的概率。我们在用神经网络训练分类器的时候其实就可以理解成是MLE。具体来说,假设数据\(D\)由一组数据样本组成,即\(D=\{d_1,...,d_n\}\),模型参数用\(\theta\)表示,我们假设每个样本预测彼此独立,所以MLE的求解方式如下:
可以看到,上面其实就是我们常用的交叉熵损失函数。那么如何用MAP来优化模型参数呢?公式如下:
可以看到 \(log(MAP(\theta))\approx log({MAP(\theta)})+log(\theta)\)。而\(p(\theta)\)其实就是常用的正则项,即对模型参数的约束。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号