can/socket can
1. 概念
参考:Linux-CAN编程详解
can引脚: cn2: 15:CAN1_H 19 CAN1_L
根据每组报文开头的 11 位标识符(扩展帧为29位标识符、CAN 2.0A 规范)解释数据的含义来决定是否接收。
CAN状态:
准备状态:
这个节点的处理器将要发送的数据和自己的标识符传送给该节点的 CAN 总线接口控制器
报文状态:
当收到总 线分配时,转为发送报文状态。
接收状态:
数据根据协议组织成一定的报文格式后发出,此时网络上的其他节点处于接收状态。处于接收状态的每个节点对接
收到的报文进行检测,判断这些报文是否是发给自己的以确定是否接收。
层次结构:
对象层:在对象层中可以为远程数据请求以及数据传输提供服务,确定由实际要使用的传输层接收哪一个报文,并且
为恢复管理和过载通知提供手段。
传输层:传输层负责位的定时及同步、报文分帧、仲裁、应答、错误检测和标定、故障界定。
物理层:波特率之类的
报文结构:
数据帧:发送数据
远程帧:请求数据
错误帧:检测到错误则发出
过载帧:提供帧与帧之间的延时
ip link set can0 type can bitrate 125000
流程:
1. 创建socket
2. bind将socket绑定can
3. 设置选项setsockopt
4. read/write
常用命令:
在控制台上输入命令:
ifconfig –a
可以得到以下结果:
lo Link encap:Local Loopback
inet addr:127.0.0.1 Mask:255.0.0.0
inet6 addr: ::1/128 Scope: Host
UP LOOPBACK RUNNING MTU:65536 Metric:1
RX packets:0 errors:0 dropped:0 overruns:0 frame:0
TX packets:0 errors:0 dropped:0 overruns:0 carrier:0
collisions:0 txqueuelen:0
RX bytes:0 TX bytes:0
eth0 Link encap:Ethernet HWaddr F6:88:05:8F:72:8C
UP BROADCAST MULTICAST MTU:1500 Metric:1
RX packets:0 errors:0 dropped:0 overruns:0 frame:0
TX packets:0 errors:0 dropped:0 overruns:0 carrier:0
collisions:0 txqueuelen:1000
RX bytes:0 TX bytes:0
can0 Link encap:UNSPEC
UP RUNNING NOARP MTU:16 Metric:1
RX packets:0 errors:0 dropped:0 overruns:0 frame:0
TX packets:4 errors:0 dropped:0 overruns:0 carrier:0
collisions:0 txqueuelen:10
RX bytes:0 TX bytes:2
Interrupt:32
令来配置 CAN 总线的位速率:
ip link set can0 type cantq 125 prop-seg 6phase-seg1 7 phase-seg2 2 sjw 1
也可以使用 ip 命令直接设定位速率:
ip link set can0 type can bitrate 125000
当设置完成后,可以通过下面的命令查询 can0 设备的参数设置:
ip -details link show can0
当设置完成后,可以使用下面的命令使能 can0 设备:
ifconfig can0 up
使用下面的命令取消 can0 设备使能:
ifconfig can0 down
在设备工作中,可以使用下面的命令来查询工作状态:
ip -details -statistics link show can0
2. 测试流程:
1. 启动Linux的can0,并初始化
ifconfig can0 down //要修改can的参数,必须先down ip link set can0 type can bitrate 1000000 ifconfig can0 up
2. 测试代码
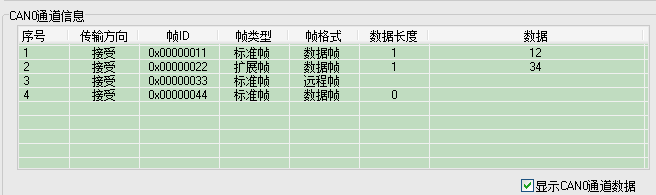
#include <stdio.h> #include <stdlib.h> #include <string.h> #include <unistd.h> #include <net/if.h> #include <sys/ioctl.h> #include <sys/socket.h> #include <linux/can.h> #include <linux/can/raw.h> int main() { int fd, nbytes; struct sockaddr_can addr; struct ifreq ifr; int ret; //1. 初始化 struct can_frame frame[4] = {{0}}; fd = socket(PF_CAN, SOCK_RAW, CAN_RAW);//创建套接字 printf("version=6;fd=%d\n", fd); strcpy(ifr.ifr_name, "can0" ); ioctl(fd, SIOCGIFINDEX, &ifr); //指定 can0 设备 addr.can_family = AF_CAN; addr.can_ifindex = ifr.ifr_ifindex; ret = bind(fd, (struct sockaddr *)&addr, sizeof(addr));//将套接字与 can0 绑定 printf("ret=%d\n", ret); //禁用过滤规则,本进程不接收报文,只负责发送 setsockopt(fd, SOL_CAN_RAW, CAN_RAW_FILTER, NULL, 0); //报文1:数据帧:标准帧、ID=0x11; frame[0].can_id = 0x11; frame[0]. can_dlc = 1; frame[0].data[0] = 0x12; //报文2:数据帧:扩展帧、ID=0x22 frame[1].can_id = 0x22 | CAN_EFF_FLAG; frame[1]. can_dlc = 1; frame[1].data[0] = 0x34; //报文3:远程帧:ID=0x33; frame[2].can_id = 0x33 | CAN_RTR_FLAG; //报文4:错误帧:ID=0x44; frame[3].can_id = 0x44 | CAN_ERR_FLAG; //循环发送两个报文 //while(1) { nbytes = write(fd, &frame[0], sizeof(frame[0])); //发送 frame[0] if(nbytes != sizeof(frame[0])) { printf("Send Error frame[0]\n!"); //break; //发送错误,退出 }else{ printf("Send Sucess frame[0]\n!"); } //usleep(10000); sleep(1); nbytes = write(fd, &frame[1], sizeof(frame[1])); //发送 frame[1] if(nbytes != sizeof(frame[1])) { printf("Send Error frame[1]\n!"); //break; }else{ printf("Send Sucess frame[1]\n!"); } //usleep(10000); sleep(1); nbytes = write(fd, &frame[2], sizeof(frame[2])); //发送 frame[1] if(nbytes != sizeof(frame[2])) { printf("Send Error frame[2]\n!"); //break; }else{ printf("Send Sucess frame[21]\n!"); } //usleep(10000); sleep(1); nbytes = write(fd, &frame[3], sizeof(frame[3])); //发送 frame[1] if(nbytes != sizeof(frame[3])) { printf("Send Error frame[3]\n!"); //break; }else{ printf("Send Sucess frame[3]\n!"); } //usleep(10000); sleep(1); } close(fd); return 0; }
3. 现象
android上现象:
Windows上现象:
波形现象:(注:因为上面的发送太少,抓不到数据,所以下面的是我更换了其他代码查看的)
CPU出来的CAN信号,是标准信号

进过转换过后的,很难查看出来,但是就是这个差分信号




 浙公网安备 33010602011771号
浙公网安备 33010602011771号