python 下串口数据的读取,解析,和保存-
#!/usr/bin/python # -*-coding: utf-8 -*- import serial import threading import binascii from datetime import datetime import struct import csv class SerialPort: def __init__(self, port, buand): self.port = serial.Serial(port, buand) self.port.close() if not self.port.isOpen(): self.port.open() def port_open(self): if not self.port.isOpen(): self.port.open() def port_close(self): self.port.close() def send_data(self): self.port.write('') def read_data(self): global is_exit global data_bytes while not is_exit: count = self.port.inWaiting() if count > 0: rec_str = self.port.read(count) data_bytes=data_bytes+rec_str #print('当前数据接收总字节数:'+str(len(data_bytes))+' 本次接收字节数:'+str(len(rec_str))) #print(str(datetime.now()),':',binascii.b2a_hex(rec_str)) serialPort = 'COM6' # 串口 baudRate = 115200 # 波特率 is_exit=False data_bytes=bytearray() if __name__ == '__main__': #打开串口 mSerial = SerialPort(serialPort, baudRate) #文件写入操作 filename=input('请输入文件名:比如test.csv:') dt=datetime.now() nowtime_str=dt.strftime('%y-%m-%d %I-%M-%S') #时间 filename=nowtime_str+'_'+filename out=open(filename,'a+') csv_writer=csv.writer(out) #开始数据读取线程 t1 = threading.Thread(target=mSerial.read_data) t1.setDaemon(True) t1.start() while not is_exit: #主线程:对读取的串口数据进行处理 data_len=len(data_bytes) i=0 while(i<data_len-1): if(data_bytes[i]==0xFF and data_bytes[i+1]==0x5A): frame_code=data_bytes[i+2] frame_len=struct.unpack('<H',data_bytes[i+4:i+6])[0] frame_time=struct.unpack('<I',data_bytes[i+6:i+10])[0] print('帧类型:',frame_code,'帧长度:',frame_len,'时间戳:',frame_time) #print(frame_code,frame_len,frame_time) if frame_code==0x03: #判断帧类型 #struct 解析数据帧 accelerated_x,accelerated_y,accelerated_z,angular_x,angular_y,angular_z,tem,speed_x,speed_y,speed_z,\ angular_v_x,angular_v_y,angular_v_z=struct.unpack('<fffffffffffff',data_bytes[i+12:i+12+frame_len-6]) dt=datetime.now() nowtime_str=dt.strftime('%y-%m-%d %I:%M:%S') #时间 loc_str=[nowtime_str,frame_time,accelerated_x,accelerated_y,accelerated_z,angular_x,angular_y,angular_z,tem,speed_x,speed_y,speed_z,\ angular_v_x,angular_v_y,angular_v_z] #写入csv文件 try: csv_writer.writerow(loc_str) except Exception as e: raise e i=i+6+frame_len+3 else: i=i+1 data_bytes[0:i]=b''
代码简介:本代码主要用来处理陀螺仪发送过来的串口数据,主线程用struct模块对串口数据进行解析,用csv模块对解析出来的数据进行保存,子线程用来进行读取串口数据,并将数据以字节流的方式存储到全局变量data_bytes
笔记:
struct模块,用于解析字节流
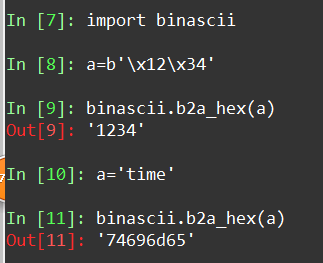
binascii模块,用于十六进制形式的显示
bytearray.fromhex():将十六进制字符串转为字节数组