Rotation Proposals
Rotation Proposals
论文Arbitrary-Oriented Scene Text Detection via Rotation Proposals
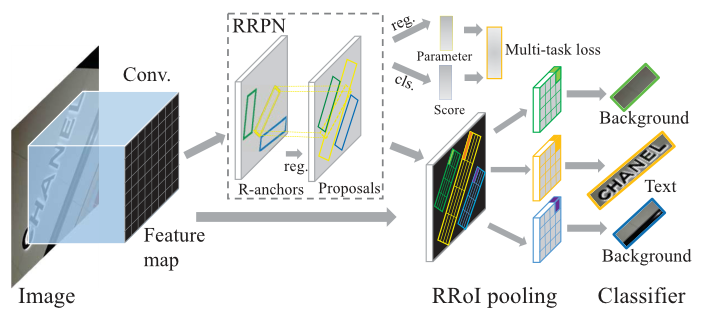
这篇论文提出了一个基于Faster R-CNN的支持任意角度旋转的场景文字检测框架.在Fast R-CNN的部分与论文Rotated Region Based CNN for Ship Detection的思路基本一致.不过多了候选框生成RPN的部分.
加入旋转角度的Faster R-CNN pipline如下:
数据预处理
给每个标记的bbox添加旋转角度,得到5元组(x,y,h,w,θ).其中(x,y)代表中心点坐标,(h,w)是短边和长边.
Rotation Anchors
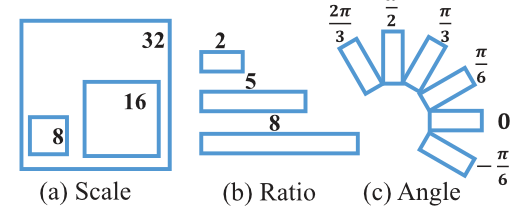
Faster R-CNN中anchors的定义是以(16,16)为基准,得到三种长宽比(0.5,1,2),三种尺度(8,16,32)的anchors,总共9个.论文提出对长宽比进行适当调整,以符合大多数文字区域的长宽比情况.另外,添加了6个不同的角度.因此在特征图上每个点预测3x3x6个box.
anchor策略如下图:
bbox回归
学习的目标是anchor与ground-truth box之间的映射关系(仿射变换与指数映射),而普通的方法里边学习的目标通常就是标签,有所不同.那么,为什么要学习一个修正值(regression),而不是直接学习真正的坐标呢?
因为在特征图上对每个点对应的原图区域进行二分类(判断是否是目标区域),坐标是通过类似滑窗的方式就能确定的,无需学习.这种滑窗搜索的方式还不够精确,可以再通过一个卷积学习一个变换(anchor与ground-truth box这两个框之间的映射关系可能相对比较固定,可以学习这个映射关系). 这种修正值的方式比直接学习最终的目标要更容易学习, 直接学习最终的目标在数值上如果不加约束, 可能收敛很慢.
注意的是这里新增的对于角度的仿射变换是 \(θ_a − θ_g + kπ\).
针对旋转的方法适配
-
IoU的计算要考虑倾斜度:
-
NMS除了考虑IoU,置信度,也可以考虑倾斜度,保留角度差值较小的.
-
RRoI Pooling Layer
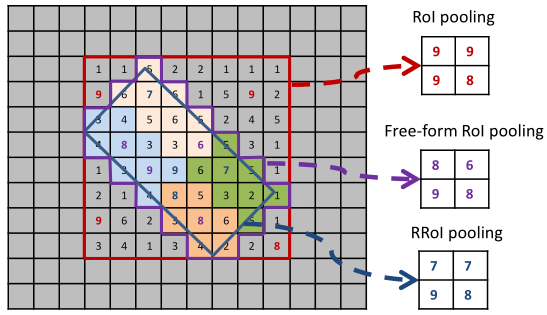
需要对有角度的roi区域仿射变换到与坐标轴对齐的矩形数组中,再采用max pooling得到相同尺寸的特征图.
相似论文:
另一篇论文R2CNN: Rotational Region CNN for Orientation Robust Scene Text Detection提出了不同的做法,在RPN中任然使用与坐标平行的box做法,在分类网络中加入旋转角度.

 浙公网安备 33010602011771号
浙公网安备 33010602011771号
