
机器人离线仿真系统展示
功能介绍:
一、计算机辅助设计功能(CAD)
1、可在工作站中建立常见的几何模型;
2、可以导入外部常见格式的物理模型(如IGES,STEP,STL等);
3、在工作站内对模型进行一系列操作(如切割,合并,求两物体的相交线等)。
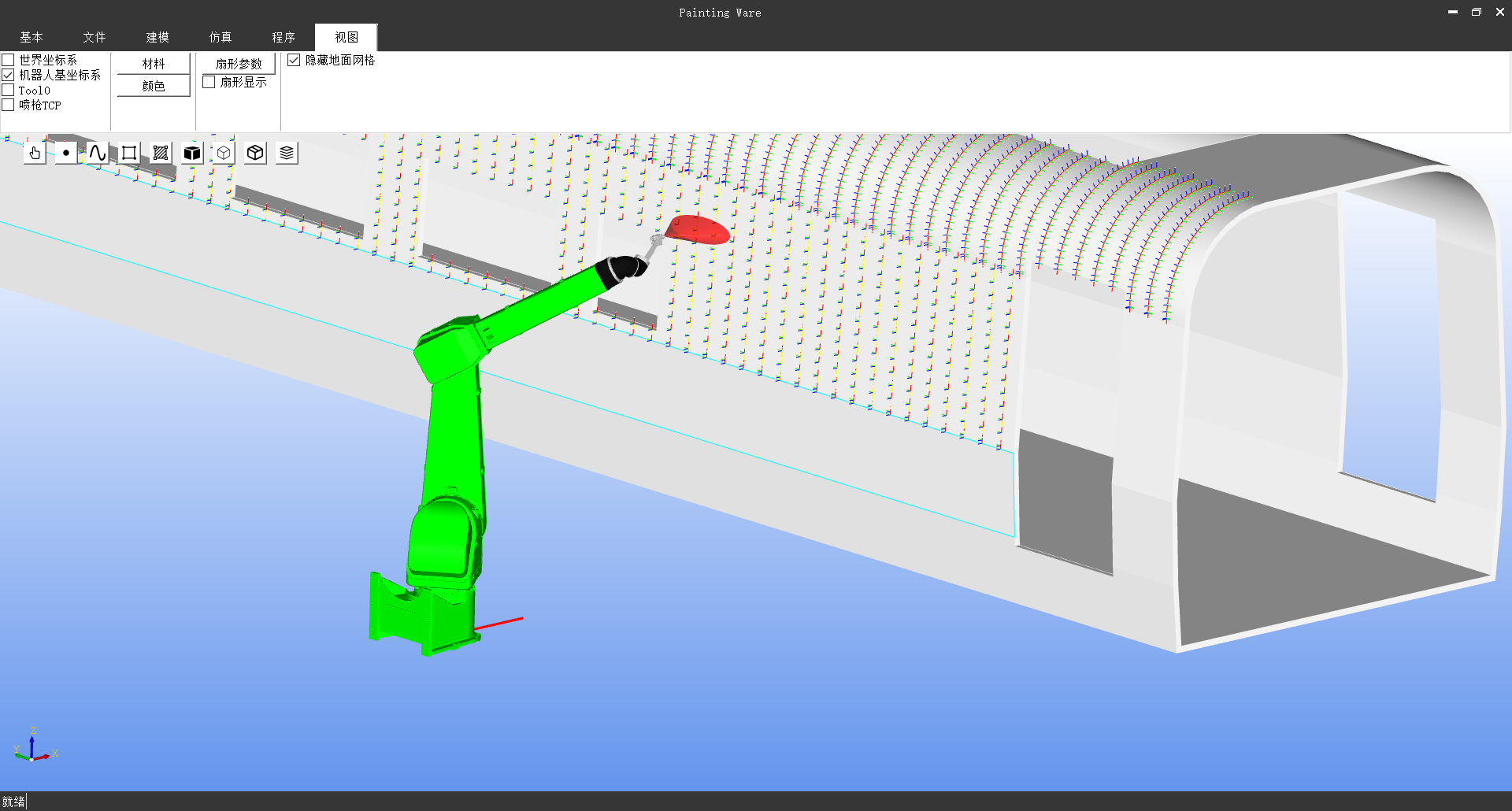
二、离线轨迹规划功能:
1、根据导入的模型,选择一定的方式,在复杂曲面生成一系列含有模型表面信息的点云;
2、将点云有序整理成一条条路径,作为机器人的末端运行路径。
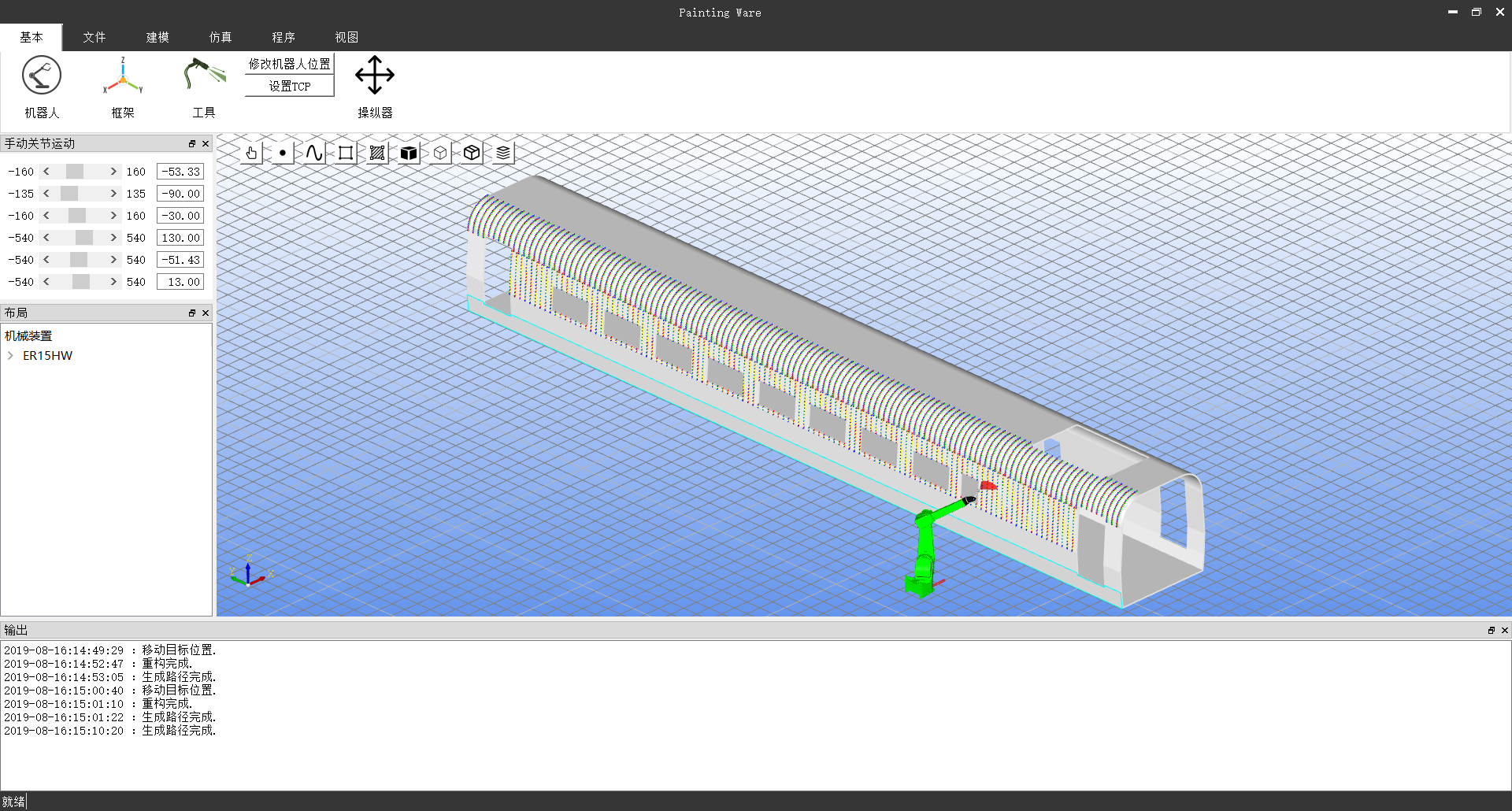
三、机器人运动仿真功能:
1、在工作站内演示机器人在当前路径下的运动过程;
2、如果仿真效果达到预期,按照当前仿真生成机器人可识别的代码。
四、界面展示:

 浙公网安备 33010602011771号
浙公网安备 33010602011771号