
map写数据到本地磁盘过程解析----spill和merge
如上次分析,其实map函数中的context.write()调用过程如下所示:

梳理下调用过程,context的write方法其实是调用了TaskInputOutputContext类的write方法,而在这个write方法内部又调用了output字段的write方法,这个output字段是NewOutputCollector类的一个对象,自然就回到了NewOutputCollector(reduce数量不是0)这个类的write方法,而这个方法内部又调用了本类的一个字段collector的collector方法,而collector字段是MapOutputBuffer类型,接下来就主要分析这两个类。
1)NewOutputCollector
private final MapOutputCollector<K,V> collector; private final org.apache.hadoop.mapreduce.Partitioner<K,V> partitioner; private final int partitions;
在构造函数初始化这三个字段,collector初始化MapOutputBuffer的一个对象,partitions就是这次运行job的reduce数量,partitioner就是使用的分区器,利用partitioner对象的getPartitioner(K,V,partitions)就可以得到键值对对应的分区号,然后将这三个参数传给collector的collect方法。MapOutputBuffer才是重点,接下来对其分析。
2)MapOutputBuffer
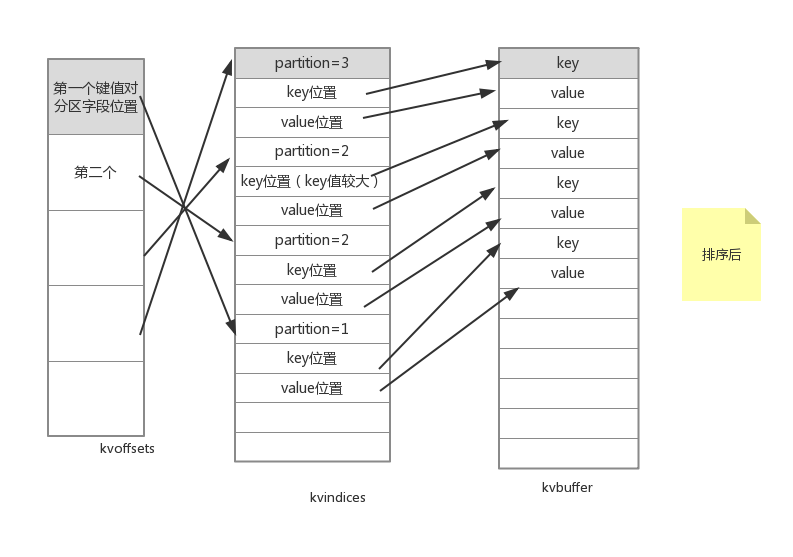
map的结果并不是直接输入到硬盘的,而是先写入内存缓冲区,这个内存缓冲区是通过三个环形结构的数组组成的,这三个环形数组分别是kvoffsets,kvindices,kvbuffer。这个三个数组又有对应的指示器变量,首先给出三个的关系图:

kvoffsets和kvindices都是int[]型数组,而kvbuffer是byte[]类型。kvoffset数组中的一个元素就存储一个键值对对应的分区号在kvindices数组中的索引。而kvindices每次使用三个元素来一个键值对的先关信息:在kvbuffer中key的起始存储位置、在kvbuffer中value的起始存储位置、以及此键值对对应的分区号partition。而kvbuffer就负责存储键值对。需要注意的是,如上图所示,kvoffsets和kvindices存储信息的大小都是确定的,因为我们完全可以一个int型的正数存储索引值和分区号,但是kvbuffer中存储的key、value大小却不是确定的。所以我们在kvindices中只是存储了这些key、value的起始位置。我们不能发现,存储一个键值对会带来16个字节的额外开销(一个int型变量是4个字节),分别是kvoffsets中的1个int变量+kvindices中的3个int变量。
其实,这三个数组的大小是由"io.sort.mb"指定,默认io.sort.mb=100,也就是sortmb=100,那么有maxmemUsage=sortmb<<20,也就是100M。默认这100M中kvoffsets和kvindices占5M(由"io.sort.record.percent"指定,默认值是0.05)其中,kvoffsets与kvindices的比例是1:3(kvoffset中一个索引值对应kvindices中的三个元素)。
在kvbuffer中如果容量达到一个的比例就会触发spill(溢写)操作,这个比例由"io.sort.spill.percent"指定,默认值是0.8。同样的kvoffsets容量达到一定程度也会触发spill操作,也是由"io.sort.spill.percent"指定。那么为什么要达到一定的比例就spill,而不是写满在spill?原因很简单,如果是写满缓存才spill,那么在刷写磁盘的时候就不能写入(因为我要读取这个缓存区域,写之前“这块区域”就是归写线程所有,其他线程不能访问),那么写线程就会阻塞,map结果就要等待写入缓存,如果达到一定比例就spill,刷写磁盘的时候就只是缓存中一定比例的区域归写线程所有,其他的部分就可以通过写线程写入map的输出,提高了吞吐量。这样就又存在一个问题,如果写线程比spill的过程块,写线程的那块儿区域已经写满了,但是spill还没有完成,也要等待,虽然spill可能已经进行了一大半,spill区域的前半部分已经读取到磁盘。所以才把kvoffsets设计为逻辑上环形数组,写到末尾的时候通过查看下一个可写的位置(kvindex)来决定是否可以写入。如下图所示:
首先给出kvoffsets的相关变量:
kvoffsets:
private volatile int kvstart = 0; //表示当前已写的数据的开始位置 private volatile int kvend = 0; // 未执行spill是等于kvstart,执行spill是不等于kvstart(等于kvindex) private int kvindex = 0; // 表示下一个可写的位置 private final int[] kvoffsets; //volatile修改的字段表示此字段可以被不同线程访问和修改

kvbuffer:
private volatile int bufstart = 0; // marks beginning of spill private volatile int bufend = 0; // marks beginning of collectable private volatile int bufvoid = 0; // marks the point where we should stop // reading at the end of the buffer private int bufindex = 0; // marks end of collected private int bufmark = 0; // marks end of record private byte[] kvbuffer;
bufstart、bufend、bufindex与kvsetoffs中对应的变量意义是相同的,不过又增加了两个变量:bufvoid和bufmark。bufvoid表示实际使用的缓存的最尾部,由于键值对的大小是不确定的,所以使用bufmark来标记一个键值对的结束,每当写入一个键值对,就更新这个值。
map输出的键值对存入缓存之前要首先经过序列化,序列化之后此才存储到缓存中。因为我们是先将序列化的key存入缓存,再将序列化了的value存入缓存,这就存在一个问题:剩下的空间存不下key或者value。
a.如果说存不下value,就会抛出MapBufferTooSmallException异常(这就是触发spill,开始spill过程了)。
b.如果存不下key,那么就要采取措施了。上张图:
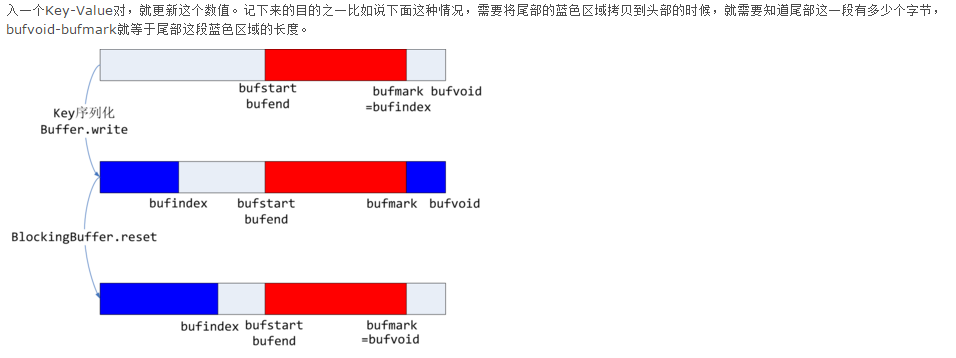
红色区域表示已经写入的键值对,第一个图中bufvoid-bufindex即使当前剩余的存储空间,而第二章图中的两块蓝色部分就是存入序列化的key所需要的空间,很明显key的存储跨越了缓存的尾端和首端,但是执行spill的之后我们需要使用RawComparator方法按照key对键值对排序,而这个方法只能对连续的二进制内存buffer进行排序,也就需要每个key都是连续存储的,因此就需要调用BlockingBuffer的reset方法尾端的蓝色部分移动到首端,此时更新bufvoid的值。
c.上面是情况是可以存下key,如果key存不下呢,那么就会直接输出key、value,也就是调用spill线程将键值对写入到文件(这就是触发了spill机制,开始spil了呀!)。
3)在spill之前需要将kvbuffer中的数据排序,先按照分区排序,在分区内再按照key排序,排序和spill的操作都是在MapOutputBuffer类中的sortAndSpill中进行的:
private void sortAndSpill() throws IOException, ClassNotFoundException, InterruptedException { //approximate the length of the output file to be the length of the //buffer + header lengths for the partitions long size = (bufend >= bufstart ? bufend - bufstart : (bufvoid - bufend) + bufstart) + partitions * APPROX_HEADER_LENGTH; FSDataOutputStream out = null; try { // create spill file final SpillRecord spillRec = new SpillRecord(partitions); final Path filename = mapOutputFile.getSpillFileForWrite(numSpills, size); out = rfs.create(filename); final int endPosition = (kvend > kvstart) ? kvend : kvoffsets.length + kvend; sorter.sort(MapOutputBuffer.this, kvstart, endPosition, reporter); int spindex = kvstart; IndexRecord rec = new IndexRecord(); InMemValBytes value = new InMemValBytes(); for (int i = 0; i < partitions; ++i) { IFile.Writer<K, V> writer = null; try { long segmentStart = out.getPos(); writer = new Writer<K, V>(job, out, keyClass, valClass, codec, spilledRecordsCounter); if (combinerRunner == null) { // spill directly DataInputBuffer key = new DataInputBuffer(); while (spindex < endPosition && kvindices[kvoffsets[spindex % kvoffsets.length] + PARTITION] == i) { final int kvoff = kvoffsets[spindex % kvoffsets.length]; getVBytesForOffset(kvoff, value); key.reset(kvbuffer, kvindices[kvoff + KEYSTART], (kvindices[kvoff + VALSTART] - kvindices[kvoff + KEYSTART])); writer.append(key, value); ++spindex; } } else { int spstart = spindex; while (spindex < endPosition && kvindices[kvoffsets[spindex % kvoffsets.length] + PARTITION] == i) { ++spindex; } // Note: we would like to avoid the combiner if we've fewer // than some threshold of records for a partition if (spstart != spindex) { combineCollector.setWriter(writer); RawKeyValueIterator kvIter = new MRResultIterator(spstart, spindex); combinerRunner.combine(kvIter, combineCollector); } } // close the writer writer.close(); // record offsets rec.startOffset = segmentStart; rec.rawLength = writer.getRawLength(); rec.partLength = writer.getCompressedLength(); spillRec.putIndex(rec, i); writer = null; } finally { if (null != writer) writer.close(); } } if (totalIndexCacheMemory >= INDEX_CACHE_MEMORY_LIMIT) { // create spill index file Path indexFilename = mapOutputFile.getSpillIndexFileForWrite(numSpills, partitions * MAP_OUTPUT_INDEX_RECORD_LENGTH); spillRec.writeToFile(indexFilename, job); } else { indexCacheList.add(spillRec); totalIndexCacheMemory += spillRec.size() * MAP_OUTPUT_INDEX_RECORD_LENGTH; } LOG.info("Finished spill " + numSpills); ++numSpills; } finally { if (out != null) out.close(); } }
其实排序事实上只是交换kvoffsets的值,比较对kvoffsets的排序比kvbuffer更快。上图:

排序默认是升序。继续看代码:
1 for (int i = 0; i < partitions; ++i) {//循环访问各个分区 2 IFile.Writer<K, V> writer = null; 3 try { 4 long segmentStart = out.getPos(); 5 writer = new Writer<K, V>(job, out, keyClass, valClass, codec, 6 spilledRecordsCounter); 7 if (combinerRunner == null) { 8 // spill directly 9 DataInputBuffer key = new DataInputBuffer(); 10 while (spindex < endPosition && 11 kvindices[kvoffsets[spindex % kvoffsets.length] 12 + PARTITION] == i) { 13 final int kvoff = kvoffsets[spindex % kvoffsets.length]; 14 getVBytesForOffset(kvoff, value); 15 key.reset(kvbuffer, kvindices[kvoff + KEYSTART], 16 (kvindices[kvoff + VALSTART] - 17 kvindices[kvoff + KEYSTART])); 18 writer.append(key, value); 19 ++spindex; 20 } 21 } else { 22 int spstart = spindex; 23 while (spindex < endPosition && 24 kvindices[kvoffsets[spindex % kvoffsets.length] 25 + PARTITION] == i) { 26 ++spindex; 27 } 28 // Note: we would like to avoid the combiner if we've fewer 29 // than some threshold of records for a partition 30 if (spstart != spindex) { 31 combineCollector.setWriter(writer); 32 RawKeyValueIterator kvIter = 33 new MRResultIterator(spstart, spindex); 34 combinerRunner.combine(kvIter, combineCollector); 35 } 36 } 37 38 // close the writer 39 writer.close(); 40 41 // record offsets 42 rec.startOffset = segmentStart; 43 rec.rawLength = writer.getRawLength(); 44 rec.partLength = writer.getCompressedLength(); 45 spillRec.putIndex(rec, i); 46 47 writer = null; 48 } finally { 49 if (null != writer) writer.close(); 50 } 51 }
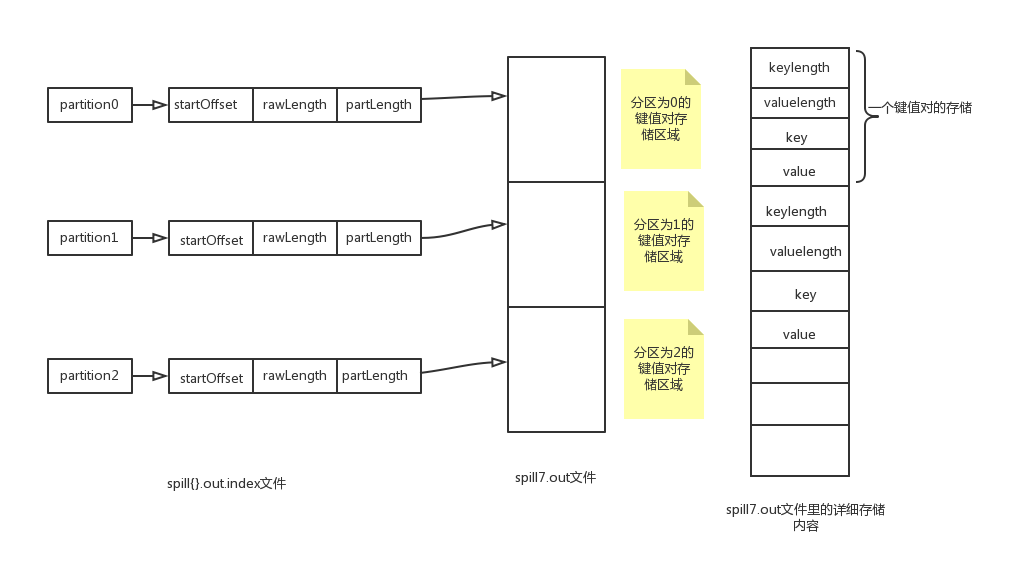
可以看出再排序完成之后,循环访问内存中的每个分区,如果没有定义combine的话就直接把这个分区的键值对spill写出到磁盘。spill文件的内容形式如下图所示:

可以看到,spill的文件就是分区的。先是分区顺序存储,在分区内又是按照key顺序存储。
但是,这又存在一个问题,那就是我怎么才能识别出这个spill文件中的各个分区呢?查看上述的42-45行代码:
rec.startOffset = segmentStart; 43 rec.rawLength = writer.getRawLength(); 44 rec.partLength = writer.getCompressedLength(); 45 spillRec.putIndex(rec, i);
而rec和spillRec的定义如下:
final SpillRecord spillRec = new SpillRecord(partitions);
IndexRecord rec = new IndexRecord();
IndexRecord有三个字段:
startOffset;//数据的起始位置,也就是一个分区的键值对的起始位置 rawLength;//数据原始长度 partLength;//数据压缩后的长度(采用压缩技术)
其实一个IndexRecord就对应一个分区内的键值对在spill文件的索引信息。
SpilRecord是以分区数量partitions作为初始化参数,很明显,SpillRecord的就是由一个个IndexRecord组成的,由上面第45行代码也可以看出。所以除了spill文件,我们还需要一个索引文件,这个索引文件的内容就是SpillRecord中的内容,索引文件格式是spill{$}.out.index,而spill的文件格式是spill{$}.out,l另外,虽然写完了spill文件之后,就会把SpillRecord的内如写入一个Spill索引文件,不过这个写不是写一个spill文件就对应写一个spill索引文件,而是超过了一个界限(1MB)再写index文件:
if (totalIndexCacheMemory >= INDEX_CACHE_MEMORY_LIMIT) { // create spill index file Path indexFilename = mapOutputFile.getSpillIndexFileForWrite(numSpills, partitions * MAP_OUTPUT_INDEX_RECORD_LENGTH); spillRec.writeToFile(indexFilename, job); } else { indexCacheList.add(spillRec); totalIndexCacheMemory += spillRec.size() * MAP_OUTPUT_INDEX_RECORD_LENGTH; }
而totalIndexCacheMemory和INDEX_CACHE_MEMORY_LIMIT的定义分别如下,均是MapOutputBuffer的字段:
1 private static final int INDEX_CACHE_MEMORY_LIMIT = 1024 * 1024; 2 private int totalIndexCacheMemory;
而MAP_OUTPUT_INDEX_RECORD_LENGTH和indexCacheList的定义如下:
private ArrayList<SpillRecord> indexCacheList; private int MAP_OUTPUT_INDEX_RECORD_LENGTH=24;
不难看出,每次spill产生的索引信息存储在spillRec中,虽然没有创建每次spill文件对应的索引文件,但是将这个包含索引信息的对象添加到了indexCacheList中,这个对象是SpillRecord类型的容器,如果本次没有不创建索引文件,那么totalIndexCacheMemory就会被更新。
totalIndexCacheMemory += spillRec.size() * MAP_OUTPUT_INDEX_RECORD_LENGTH;
最后的最后,当Map输入数据处理完毕之后,会调用flush方法将缓存中的数据刷写道磁盘。
spill文件和其索引文件的形式以及对应关系如下所示:
不过,一个map会产生很多的spill文件,当MapTask正常退出之前这些文件会被合并一个大out文件和一个大的index文件,如果想看到中间的spill文件就需要修改一些参数值:
io.sort.mb=10;//用于存储map输出键值对的缓存,默认值是100(100M) io.sort.spill.percent=0.1;//缓存spill的比例,默认是0.8. //将以上两个参数修改之后就可以使map更多的spill数据到硬盘上,一个直观的效果就是spill的文件有很多。我们知道IO是很耗时间的,相当于“拖慢”了map的速度。 //另外,还有一个参数: io.sort.factor=5;//这个参数默认是10,表示执行合并spill文件的时候最多一次可以合并多少个spill文件,调下这个值可以看到合并的过程,也就是看到file.out(所有spill文件合并后的大文件)和spill.out并存
上图:

以下是spill文件的路径:


spill是mapreduce的中间结果,存储在数据节点的本地磁盘上,存储路径由以下参数指定:
hadoop.tmp.dir="/home/hadoop/HadoopData/tmp/";//这是hadoop的临时基础目录,很对目录都依赖它 mapred.local.dir=${hadoop.tmp.dir}/mapred/local;//这是默认值,也就是mapred的中间数据文件的存储目录。
最后要把所有的spill文件和index文件合并,合并之后就是这样:
3)Merge
Merge就是将多个spill文件合并成一个大的file.out文件,首先读取若干spill文件的内容到内存,然后对其排序,排序方法时多路归并排序,首先按照分区号排序,在按照key排序(默认是快排),归并过程简要描述如下:

以上就是map输出到磁盘的过程,这些中间文件(fiel.out,file.out.inde)将来是要等着Reducer取走的,不过并不是Reducer取走之后就删除的,因为Reducer可能会运行失败,在整个Job完成之后,JobTracker通知Mapper可以删除了才会将这些中间文件删掉.向硬盘中写数据的时机:
(1)当内存缓冲区不能容下一个太大的kv对时。spillSingleRecord方法。
(2)内存缓冲区已满时。SpillThread线程。
(3)Mapper的结果都已经collect了,需要对缓冲区做最后的清理。Flush方法。
感谢:
http://www.cnblogs.com/esingchan/p/3947156.html
http://zheming.wang/hadoop-mapreduce-zhi-xing-liu-cheng-xiang-jie.html
http://www.cnblogs.com/forfuture1978/archive/2010/11/19/1882279.html

 浙公网安备 33010602011771号
浙公网安备 33010602011771号