


张量分解与应用-学习笔记[03]
4 压缩与Tucker分解法
4.0 Tucker分解法定义
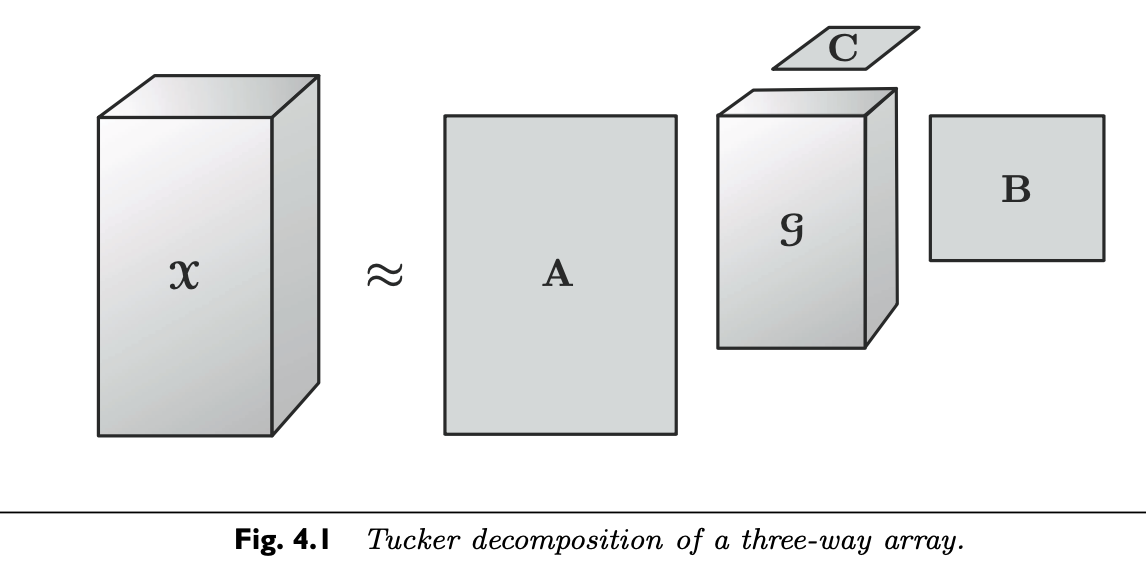
- Tucker分解法可以被视作一种高阶PCA. 它将张量分解为核心张量(core tensor)在每个mode上与矩阵的乘积. 因此, 对三维张量\(\mathcal{X}\in\mathbb{R}^{I \times J \times K}\)来说, 我们有如下分解:
-
其中, \(\mathrm{A}\in \mathbb{R}^{I\times P}\), \(\mathrm{B}\in\mathbb{R}^{J\times Q}\), 和 \(\mathrm{C} \in \mathbb{R}^{K\times R}\)被称之为因子矩阵, 他们通常是正交的(orthogonal). 他们通常可以被作每个mode下的主成分principal components. 其中, 张量\(\mathcal{G} \in \mathbb{R}^{P \times Q \times R}\) 被称之为核心张量(core tensor). 他的每个数字元素代表了不同成分之间的互动程度.
-
对每个元素来说, Tucker分解法可以写作:
-
\(P,Q\)和\(R\)为对应的因子矩阵\(A,B\)和\(C\)的成分数(例如列向量的数目). 如果\(P,Q,R\)小于\(I,J,K\), 我们可以将核心张量\(\mathcal{G}\)视作\(\mathcal{X}\)的一个压缩版本. 在某些情况下, 压缩版本所需的空间远远小于原始张量.
-
大多数的拟合算法假设因子矩阵的列向量是单位正交(orthnonormal)的, 但其实这并不是必要的. 事实上, CP分解法可以被视作为Tucker分解法的一个特例: 也就是当满足核心张量为超对角张量并\(P=Q=R\).
-
矩阵化后的形式为:
- 上述公式以3维张量为例, 而这不妨碍其概念扩展到N维张量:
- 对每个元素来说
- 矩阵化版本可写为
- 另有两个Tucker分解法的变种值得特别注意. 首先是Tucker2分解法. 顾名思义, 他只使用某2个矩阵来分解, 第三个矩阵为单位矩阵, 故一个三阶张量的Tucker2分解可以写为以下形式:
- 这和原始的Tucker分解其实没什么不同, 唯独\(\mathcal{G}\in\mathbb{R}^{P \times Q \times R}\)且 \(R=K\) 并 \(\mathrm{C=I}\) (\(K\times K\)的单位矩阵). 类似的, Tucker1分解法只利用某一个矩阵来分解并将剩余矩阵设为单位矩阵. 例如, 如果设第二和第三因子矩阵为单位矩阵, 我们可以得到:
- 这等价于一个标准的2维PCA(主成分分析). 因为
-
这些概念很轻松便可延伸至N维张量: 我们可以设任何因子矩阵们的子集为单位矩阵.
-
很显然, 张量分解有着许多的选择, 有时候会给我们根据特定任务选择模型时带来麻烦. 想要了解3维下如何选择模型的, 可以参考此论文.
4.1. The n-Rank
-
令\(\mathcal{X}\)为一个尺寸为\(I_1\times I_2 \times \dots \times I_N\)的N阶张量. 那么, 他的n-rank, 写作\(\text{rank}_n(\mathcal{X})\)是\(\mathrm{X}_{(n)}\)的列秩(column rank). 换句话说, n-rank是mode-n fiber所生成的(span)向量空间的维度.如果我们令\(R_n=\text{rank}_n(\mathcal{X})\,\text{ for }\, n=1,\dots,N\), 那么我们可以说\(\mathcal{X}\)是一个\(\text{rank}-(R_1,R_2,\dots,R_N)\)张量.
-
n-rank切记不能与秩(rank), 也就是最小的秩1成分数目, 所混淆.
-
显然, \(R_n \leq I_n \text{ for all }n=1,\dots,N.\)
-
对于一个给定的张量\(\mathcal{X}\), 我们可以很轻易地找到一个秩为 \(\big( R_1,R_2,\dots,R_N \text{ where }R_n = rank_n(\mathcal{X})\big)\)的精确( exact ) Tucker分解. 但如果我们计算的Tucker分解的秩低于这组值, 也就是对某些n来说\(R_n < \text{rank}_n(\mathcal{X})\) 那么, 我们将必然无法获得精确的结果并且其计算会变得更为困难. 下图展示了truncated Tucker Decomposition (并不一定要从一个精确Tucker分解中舍项得来). 该分解将不能精确地还原\(\mathcal{X}\)

4.2. Tucker分解法的计算
-
计算Tucker分解的第一个可行的方法来自于前文所述的Tucker1算法, 即, 舍去一个矩阵来最大程度的捕捉其mode-n fiber的分布变化(variation). 由于后人的研究和分析, 此法后来又被称之为higher-order SVD(HOSVD). 研究者指出, HOSVD是一个可信的矩阵SVD的一般化理论, 并且讨论了很多如何更有效率的计算\(\mathrm{X}_{(n)}\)的前排奇异向量的方法. 当对某些n, \(R_n<\text{rank}_n(\mathcal{X})\)的时候, 我们称之为truncated HOSVD. 事实上, HOSVD的核心张量是全正交(all-orthogonal)的, 这与分解时的舍位(truncate)有关. 详情请见此论文
-
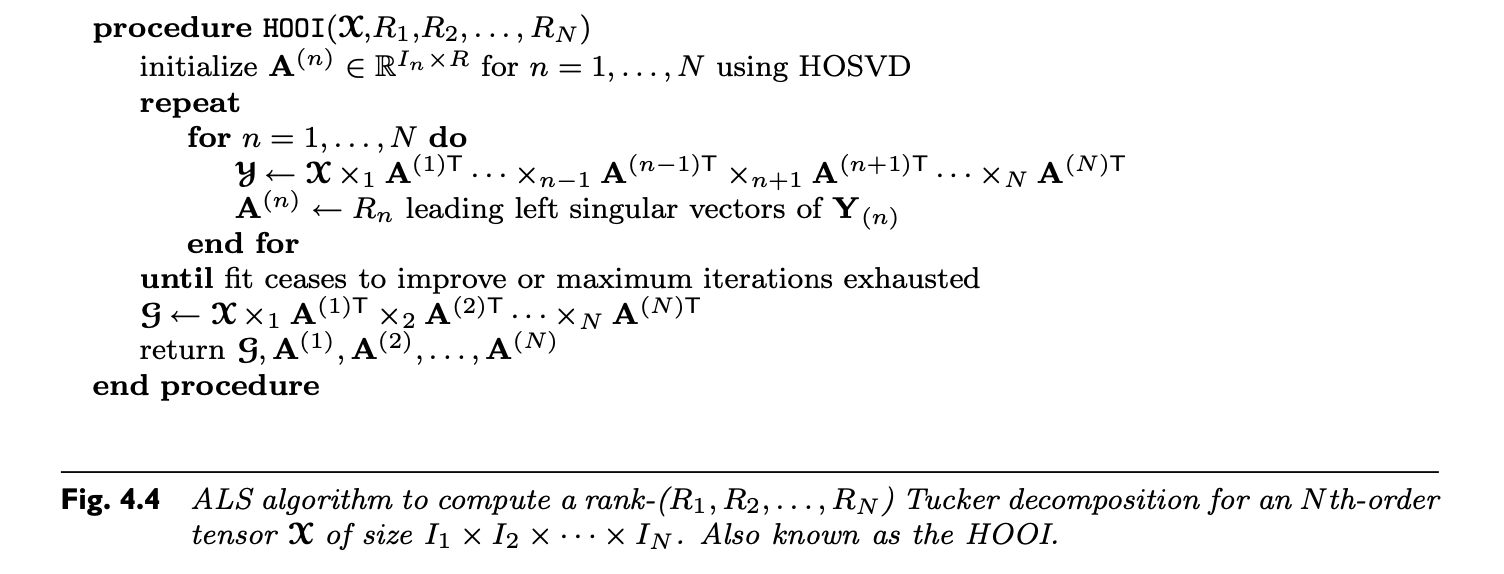
truncatd HOSVD在最小化估计错误的范数这个角度上来说并不是最优的, 但给迭代交替最小方差法(iterative ALS algorithm)提供了一个不错的起点. 1980年, 计算三维张量的Tucker分解的ALS法TUCKALS3诞生了. 然后该法被延伸至对n维张量也有效. 同时, 一种更为有效的计算因子矩阵的方法被运用: 简单地说, 只去计算\(\mathrm{X}_{(n)}\)的主奇异向量(dominant singular vectors). 并且运用SVD来代替特征值分解(eigenvalue decomposition)或者只计算其主子空间(dominant subspace)的单位正交基底向量(orthonomal basis)即可. 这种崭新的提高效率的算法被称之为更高维正交递归(higher-order orthogonal iteration HOOI). 见下图4.4.
- 设\(\mathcal{X}\)是一个\(I_1 \times I_2 \times \dots \times I_N\)尺寸的张量, 那么我们渴望解决的优化问题可以被写作:
- 上述目标函数改写为矩阵形式后如下:
- 显然, 核心张量\(\mathcal{G}\)必须满足
- 那么我们就能把上述目标函数(的平方)写为:
-
我们仍然可以使用ALS来解(4.3)的目标函数, 由于\(||\mathcal{X}||\)是个常数, (4.3)可以被重新定义为一系列包含如下最大化问题的子问题集, 其中每个n对应了第n个成分矩阵:
- 目标函数(4.4)也可以被写作矩阵形式:
-
其解可以被SVD所确定:只需将\(A^{(n)}\)定义为W的前\(R_n\)个奇异向量即可. 这种方法会收敛至一个解使得目标函数不再下降, 但并不确保收敛至一个全局最优解甚至是一个驻点.
-
最近, Newton-Grassmann优化法也被考虑进计算Tucker分解法之中. 他使得解可以收敛至一个驻点, 且速度更快(即使每次迭代的计算成本变高了). 详情请参考
此论文 -
此论文着重讲述了如何选择Tucker分解法的rank, 和我们CP分解法讨论时类似, 他通过计算一个HOSVD来做出选择.
4.3. 唯一性的缺乏及克服它的方法
- Tucker分解法的结果并不是唯一的. 考察一个普通的3维分解(4.1, 见本文开头), 令\(\mathrm{U}\in\mathbb{R}^{P\times P}\), \(\mathrm{V}\in \mathbb{R}^{Q\times Q}\)和\(\mathrm{W}\in\mathbb{R}^{R\times R}\)为非奇异矩阵. 那么:
-
换句话说, 我们可以通过将因子矩阵乘以相反的修改方式来抵消修改核心张量\(\mathcal{G}\)的影响,从而使得我们可以不影响拟合的情况下随意修改核心张量.
-
这种自由度延伸出了一种新的分支: 选择一种修正法使得核心矩阵的大部分元素为0, 通过降低不同成分之间的互相影响来尽可能提高唯一性. 核心矩阵的超对角被证明是不可能的, 但尽可能多的使得元素为0或接近于0是可能的. 一种方式是通过简化核心来使得目标函数最小化; 另一种方式是用Jacob及类型的算法最大化对角上的值; 最后, 我们提到过HOSVD的解为一个全正交的核, 这种特殊的类型也许会被证实有用.
Tucker分解法的介绍就到此结束了. 本文仍然缺少一些例子与引用论文的原理讲述, 将在日后补足.
下一章将是最后一章: 多种其他分解法的介绍, 欢迎关注!

