CC2530 中的ZigBee协议栈
CC2530 中的ZigBee协议栈
1.何为协议栈
ZigBee协议栈将各个层的协议集合在一起,并以函数的形式实现,并且向用户提供接口,用户能够直接调用。
它本身就为一个工程。
2. 如何使用
- 开始组网,通过调用协议栈的组网函数等来实现网络的建立以及其他节点的加入网络;
- 发送数据,节点通过调用协议栈的消息发送函数来实现数据的无线发送;
- 接收数据,节点调用协议栈的消息接收函数来实现无线数据接收功能。
这就是它最常用得方法,组网,发送数据,接收数据,在协议栈中都有相应得函数。
3.下载ZigBee协议栈
[官网下载](Z-STACK 驱动程序或库 | 德州仪器 TI.com.cn)
4.例程文件介绍
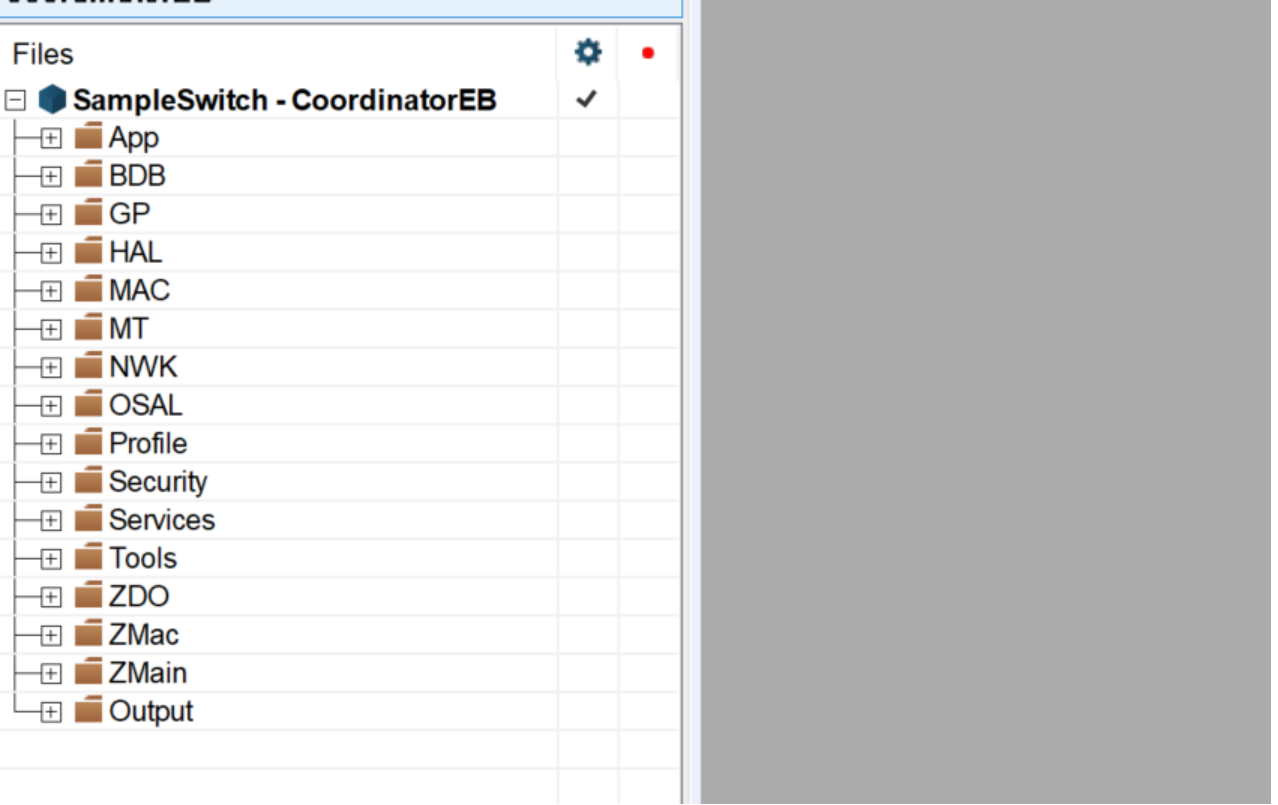
在下载的zigbee协议栈中随便找一个事例工程打开,打开工程后如上所示。
APP: 为应用层的代码,用户的工作空间就在这。
BDB: zigbee 3.0新增的特性。实现ZigBee BDB(Base Device Behavior,设备基础行为)功能
GP:实现ZigBee GP(Green Power,绿色能源)功能。
HAL:硬件抽象层,存放各种驱动程序。
MAC:媒体介质访问控制,实现物理层通信及IEEE 802.15.4协议。
MT:监视层,为监视协议栈各层的运行状态提供支持。
NWK: ZigBee网络层。
OSAL:操作系统抽象层。
Profile:存放ZigBee标准化定义及相关功能实现的源代码文件。
Security:实现安全相关服务。
Services:提供一些公共的、常用的功能。
Tools:存放工程配置相关的文件。
ZDO:存放ZDO(ZigBee Device Object,ZigBee设备对象)相关源代码文件。
ZMac:属于mac层的内容。
ZMain:存放主函数所在的源代码文件及系统硬件启动相关的源代码文件。
Output:存放工程编译/链接时输出的文件。
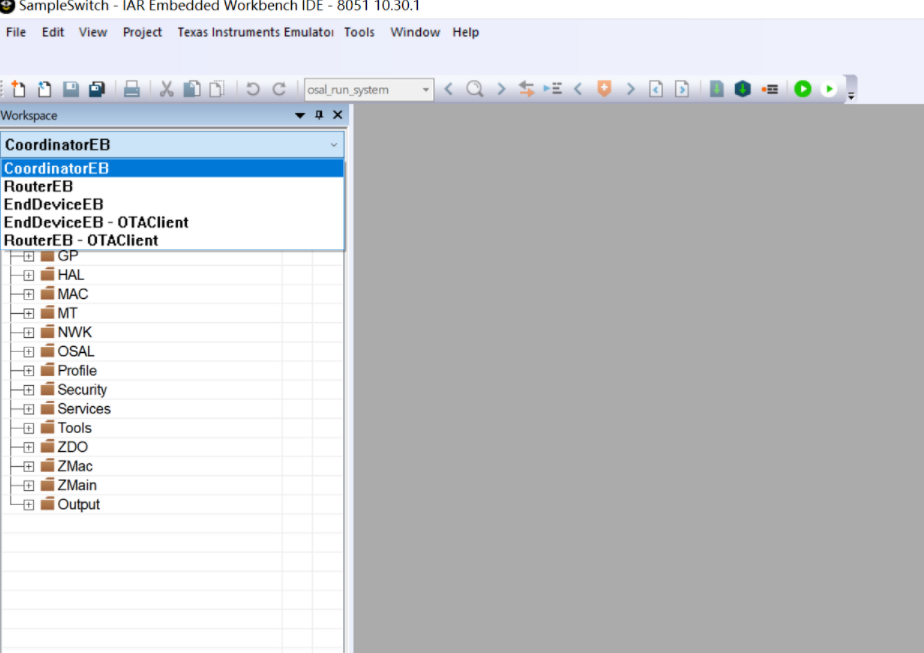
ZigBee网络设备类型有3种,分别是Coordinator(协调器),Router(路由器)和EndDevice(终端设备),图中选项卡选项的含义描述如下:
(1)CoordinatorEB : ZigBee协调器。
(2)RouterEB : ZigBee路由器。
(3)EndDeviceEB : ZigBee终端设备。
(4)EndDeviceEB-OTAClient : 支持OTA(Over The Air)空中升级的ZigBee终端设备。
(5)RouterEB-OTAClient : 支持OTA(Over The Air)空中升级的ZigBee路由器。
5 启动流程
5.1 main()
打开ZMain文件夹下的ZMain.c文件,其中有main()函数,为程序的入口函数,程序在这里开始运行
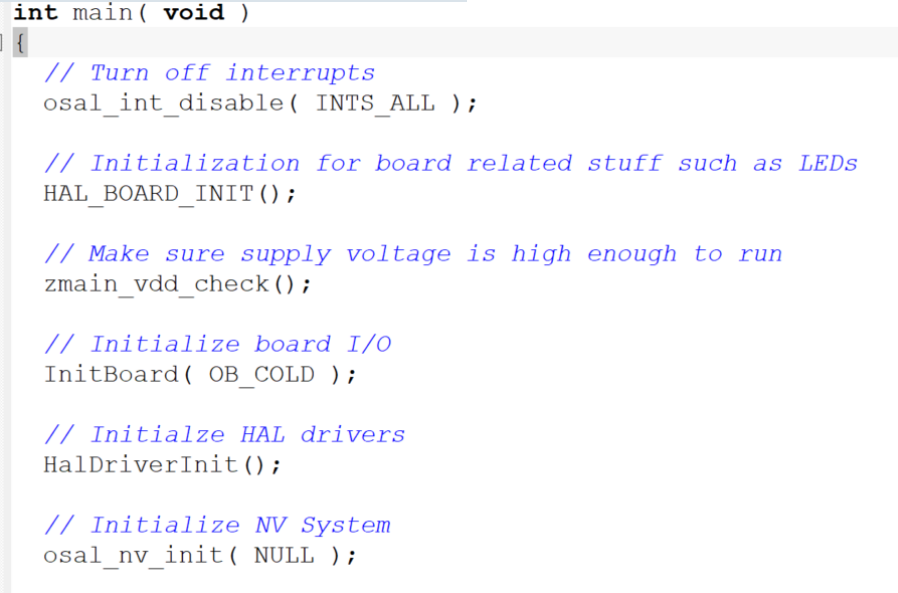
里面有很多初始化函数,下面只说这两个函数:
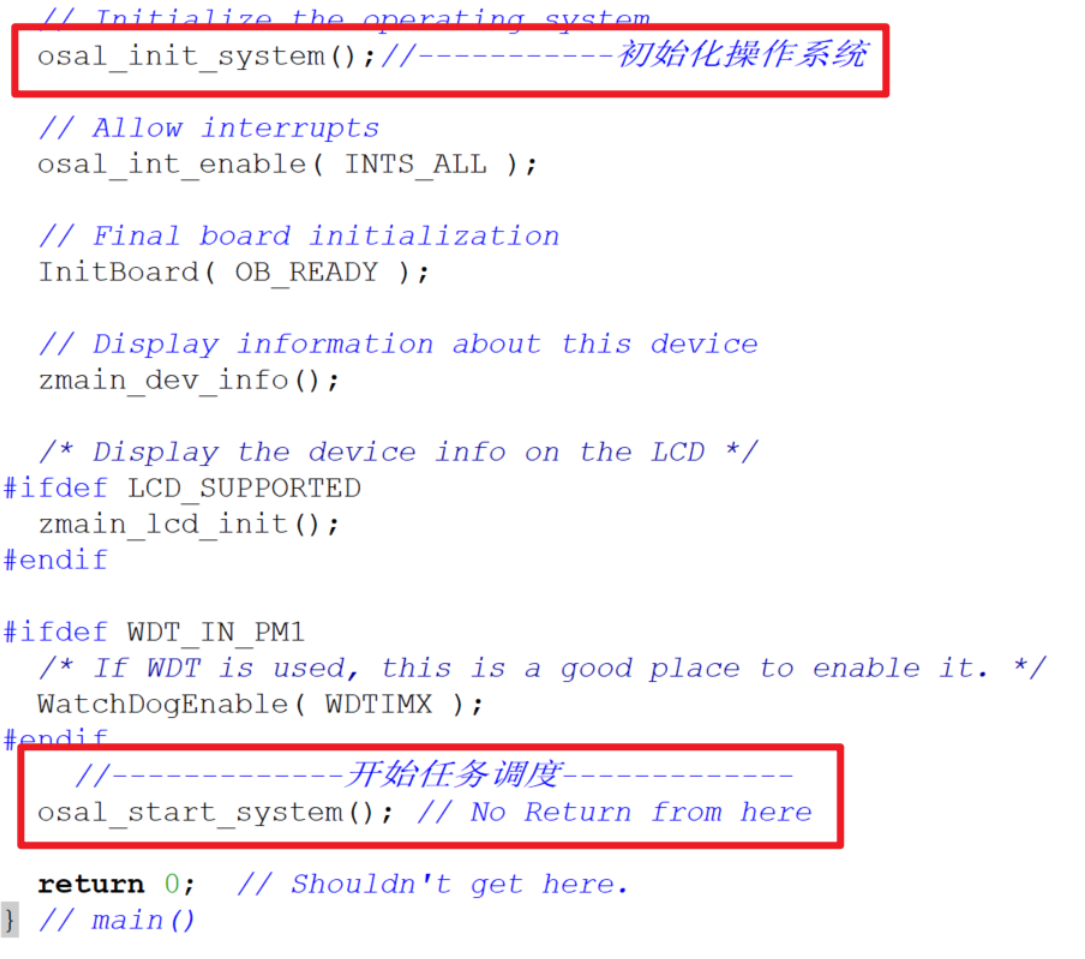
osal_init_system();//-----------初始化操作系统--------
osal_start_system(); //---------开始任务调度---------
5.2 osal_init_system()
先看osal_init_system()这个函数,先跳转到这个函数里面
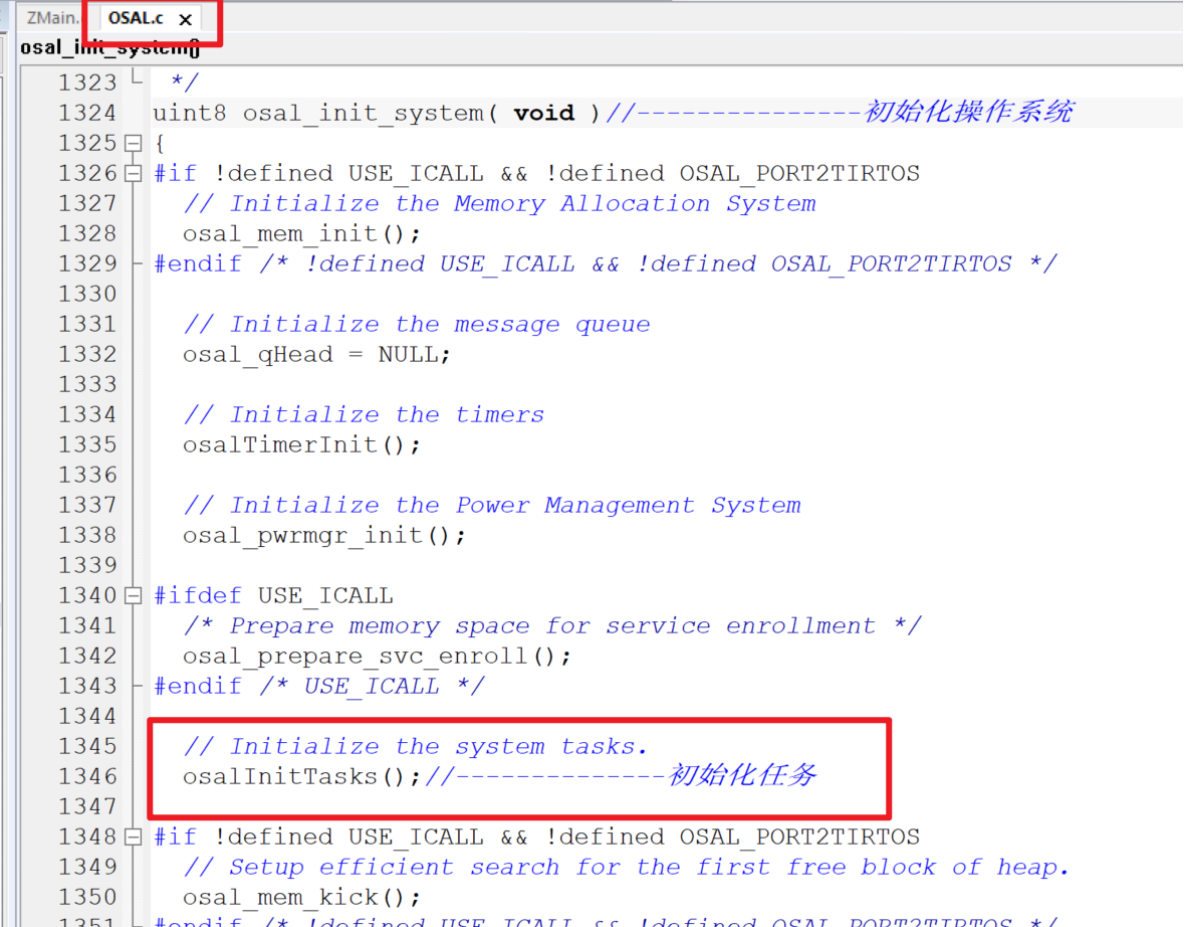
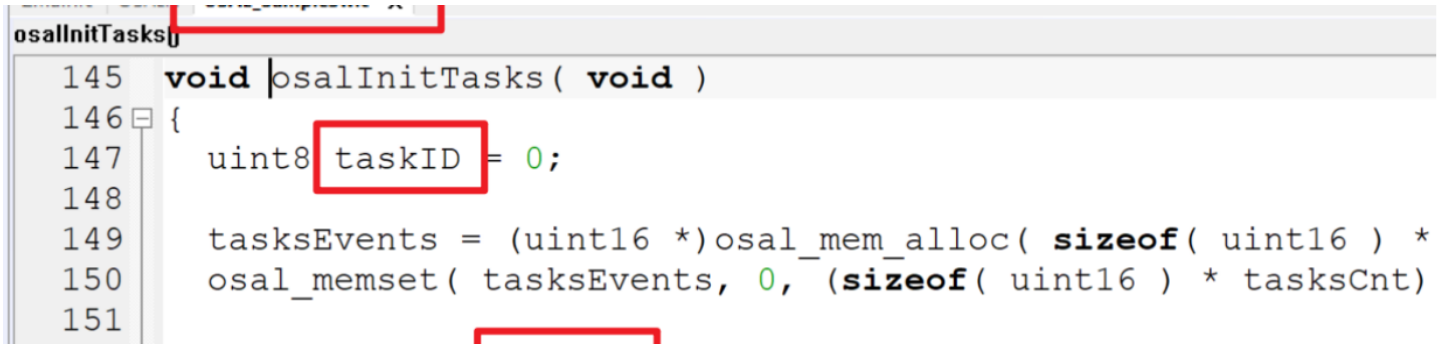
来到这个函数,可以看到调用了osalInitTasks()这个函数,接着跳转到osalInitTasks()这个函数,
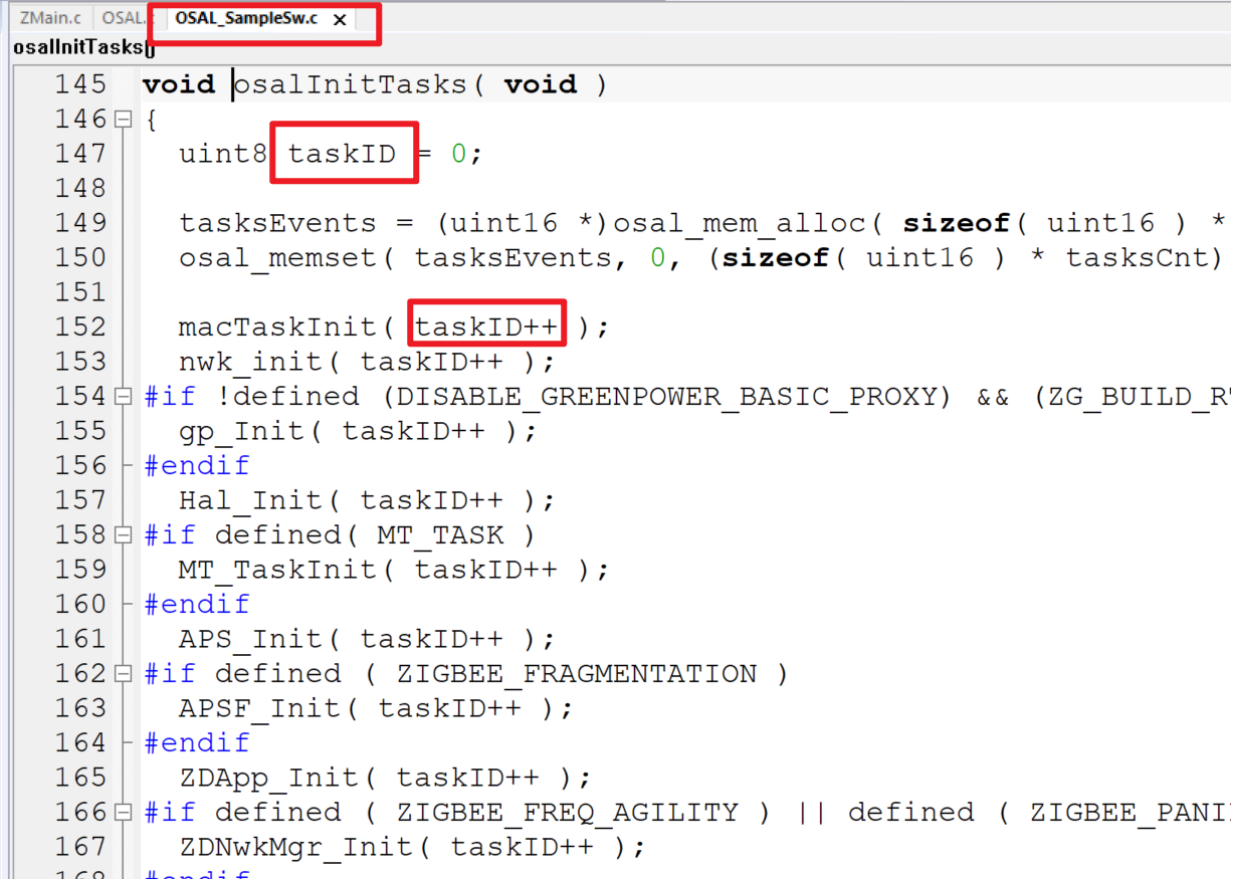
来到这个函数,可以看到有各个层的初始化代码,并且分给了他们任务ID,下面还会提到这个任务ID,到这每个层的初始化就结束了,每个层都有自己的任务ID。
5.3 osal_start_system()
这个函数轮询任务池的函数,跳转到osal_start_system()中
void osal_start_system( void )
{
#ifdef USE_ICALL
/* Kick off timer service in order to allocate resources upfront.
* The first timeout is required to schedule next OSAL timer event
* as well. */
ICall_Errno errno = ICall_setTimer(1, osal_msec_timer_cback,
(void *) osal_msec_timer_seq,
&osal_timerid_msec_timer);
if (errno != ICALL_ERRNO_SUCCESS)
{
ICall_abort();
}
#endif /* USE_ICALL */
#if !defined ( ZBIT ) && !defined ( UBIT )
//主循环
for(;;)
#endif
{
//系统轮询调度
osal_run_system();
#ifdef USE_ICALL
ICall_wait(ICALL_TIMEOUT_FOREVER);
#endif /* USE_ICALL */
}
}
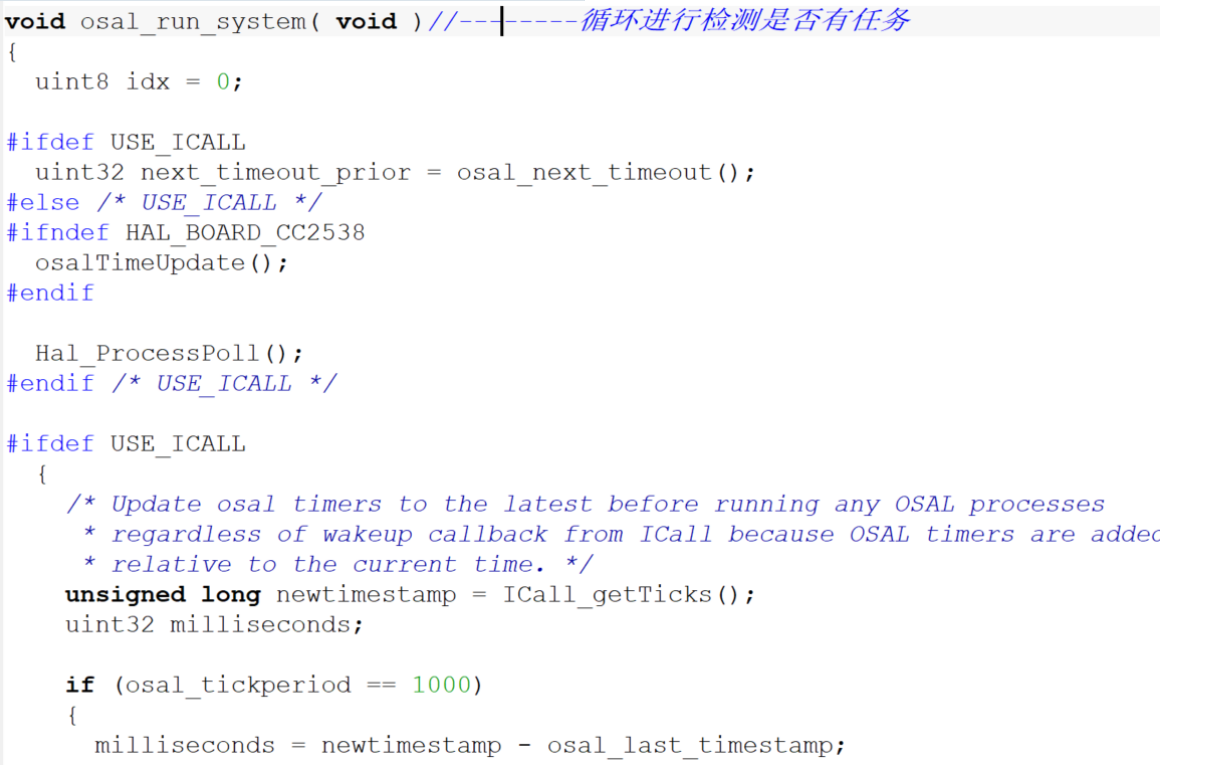
在osal_start_system()函数的主循环中,循环调用了 osal_run_system()函数,该函数主要工作轮询任务池。osal_run_system()函数的定义OSAL.c文件中,跳转到osal_run_system()中
代码太长,就贴出来一部,需要注意的就下面几行:
do {
if (tasksEvents[idx]) // Task is highest priority that is ready.
{
break;
}
} while (++idx < tasksCnt);
if (idx < tasksCnt)
{
uint16 events;
halIntState_t intState;
HAL_ENTER_CRITICAL_SECTION(intState);
events = tasksEvents[idx];
tasksEvents[idx] = 0; // Clear the Events for this task.
HAL_EXIT_CRITICAL_SECTION(intState);
activeTaskID = idx;
events = (tasksArr[idx])( idx, events );
activeTaskID = TASK_NO_TASK;
HAL_ENTER_CRITICAL_SECTION(intState);
tasksEvents[idx] |= events; // Add back unprocessed events to the current task.
HAL_EXIT_CRITICAL_SECTION(intState);
}
这是检测每个层是否有任务,如果有就去执行这个任务,执行之后,接着轮询,检测是否有任务,idx就是上述提到的任务ID。
do {
if (tasksEvents[idx]) // Task is highest priority that is ready.
{
break;
}
} while (++idx < tasksCnt);
这段代码中tasksEvents[idx]就是之前
申请的空间,用于存放每个层是否有任务的一个事件组之类的,如果有任务,这个层的tasksEvents[idx]就会被置1,读者可以跳转函数看看,
events = tasksEvents[idx];
...
activeTaskID = idx;
events = (tasksArr[idx])( idx, events );
activeTaskID = TASK_NO_TASK;
...
这个就是把任务的标志为给events,然后调用tasksArr [idx] (idx,events),这个函数就会根据idx的值调用相应层的事件处理函数.
6 应用层
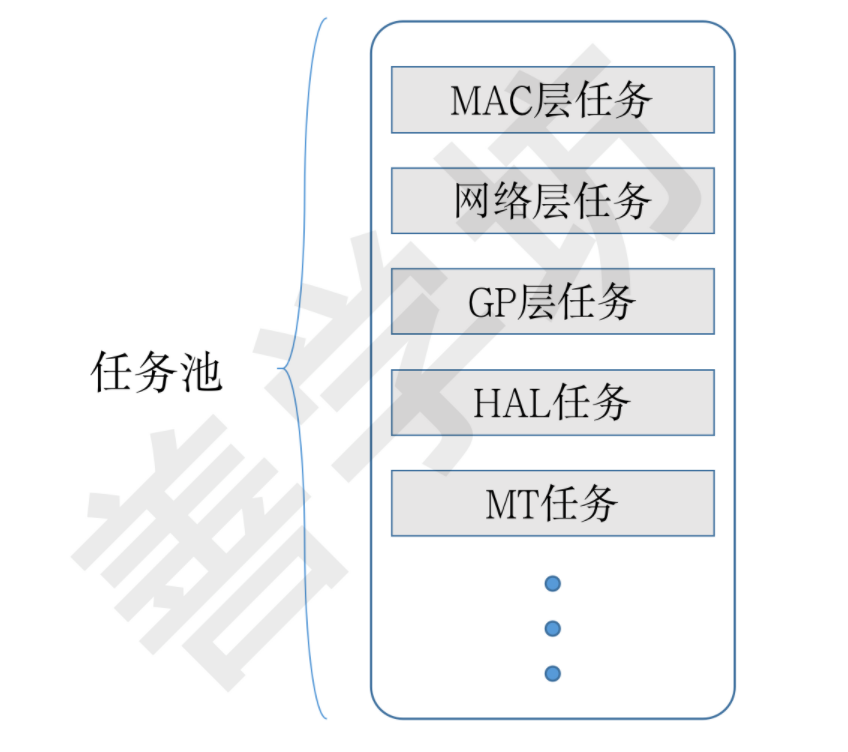
每一个层次都有一个对应的任务来处理本层次的事务,例如MAC层对应一个MAC层的任务、网络层对应一个网络层的任务、HAL对应一个HAL的任务,以及应用层对应一个应用层的任务等,这些各个层次的任务构成一个任务池,这个任务池也就是上节课讲到的tasksEvents数组,如图所示。
下面打开APP下的
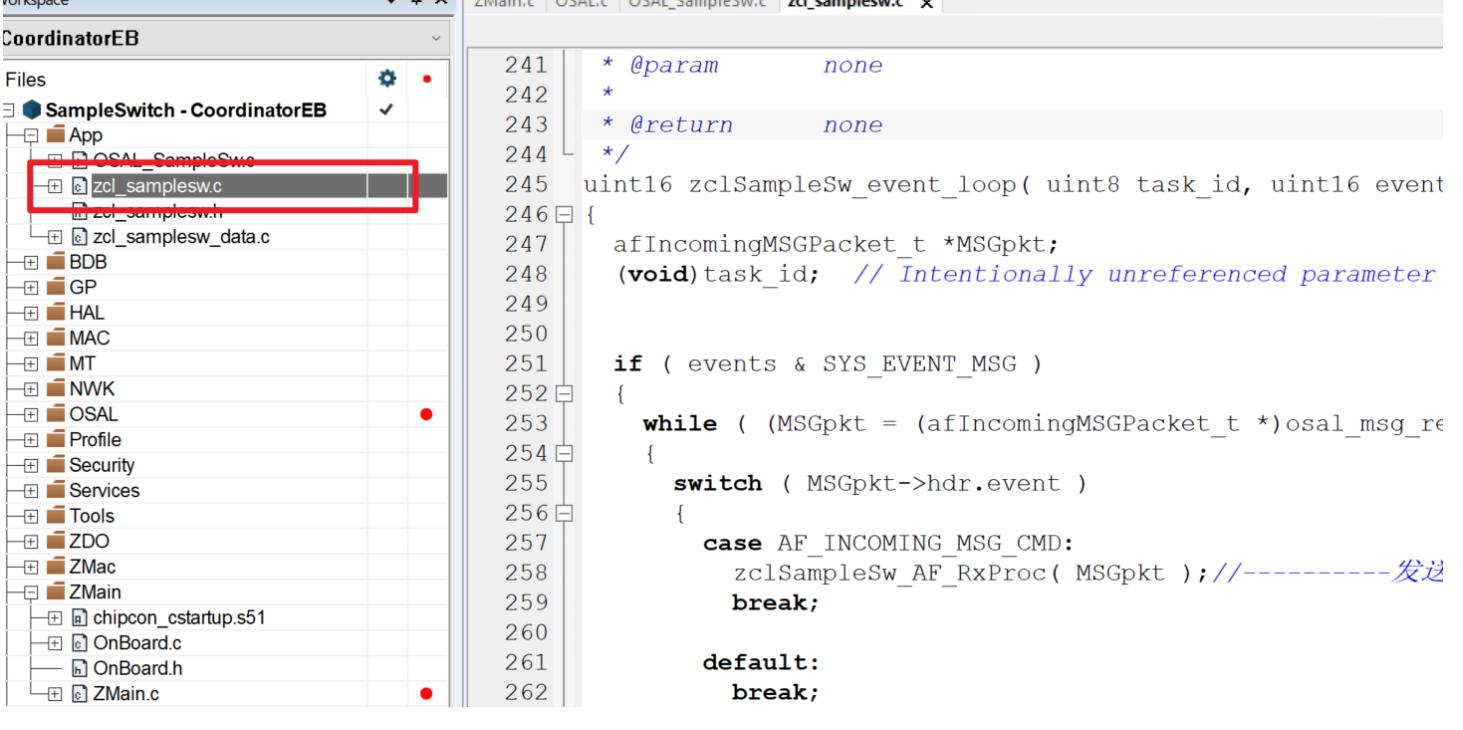
打开的例程不同,名字可能不同,不过,这无所谓
找到这两个函数
void zclSampleSw_Init( byte task_id )
{
zclSampleSw_TaskID = task_id;
...
MT_UartInit();
MT_UartRegisterTaskID(task_id);
...
#endif
}
uint16 zclSampleSw_event_loop( uint8 task_id, uint16 events )
{
afIncomingMSGPacket_t *MSGpkt;
(void)task_id; // Intentionally unreferenced parameter
if ( events & SYS_EVENT_MSG )
{
while ( (MSGpkt = (afIncomingMSGPacket_t *)osal_msg_receive( zclSampleSw_TaskID )) )
{
switch ( MSGpkt->hdr.event )
{
...
default:
break;
}
// Release the memory
osal_msg_deallocate( (uint8 *)MSGpkt );
}
// return unprocessed events
return (events ^ SYS_EVENT_MSG);
}
// Rejoin Event
if ( events & SAMPLEAPP_REJOIN_EVT )
{
bdb_StartCommissioning(BDB_COMMISSIONING_MODE_NWK_STEERING |
BDB_COMMISSIONING_MODE_FINDING_BINDING );
return ( events ^ SAMPLEAPP_REJOIN_EVT );
}
...
#endif
// Discard unknown events
return 0;
}
每个层都有这两个函数,读者可以找找,看一下,一个初始化函数,一个事件处理函数,里面的参数前面也有提到,看一看。
7 结束
这里只讲了一些启动的大致过程,对于事件发送函数,如何处理函数及发送接收函数未提到,只是想让读者及笔者有一个大致方向,下面推荐一些更为详细的.
推荐
[推荐 一](Zigebee复习_void genericapp_messagemsgcb( afincomingmsgpacket_-CSDN博客)


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 震惊!C++程序真的从main开始吗?99%的程序员都答错了
· 别再用vector<bool>了!Google高级工程师:这可能是STL最大的设计失误
· 单元测试从入门到精通
· 【硬核科普】Trae如何「偷看」你的代码?零基础破解AI编程运行原理
· 上周热点回顾(3.3-3.9)