读AI新生:破解人机共存密码笔记04计算的极限
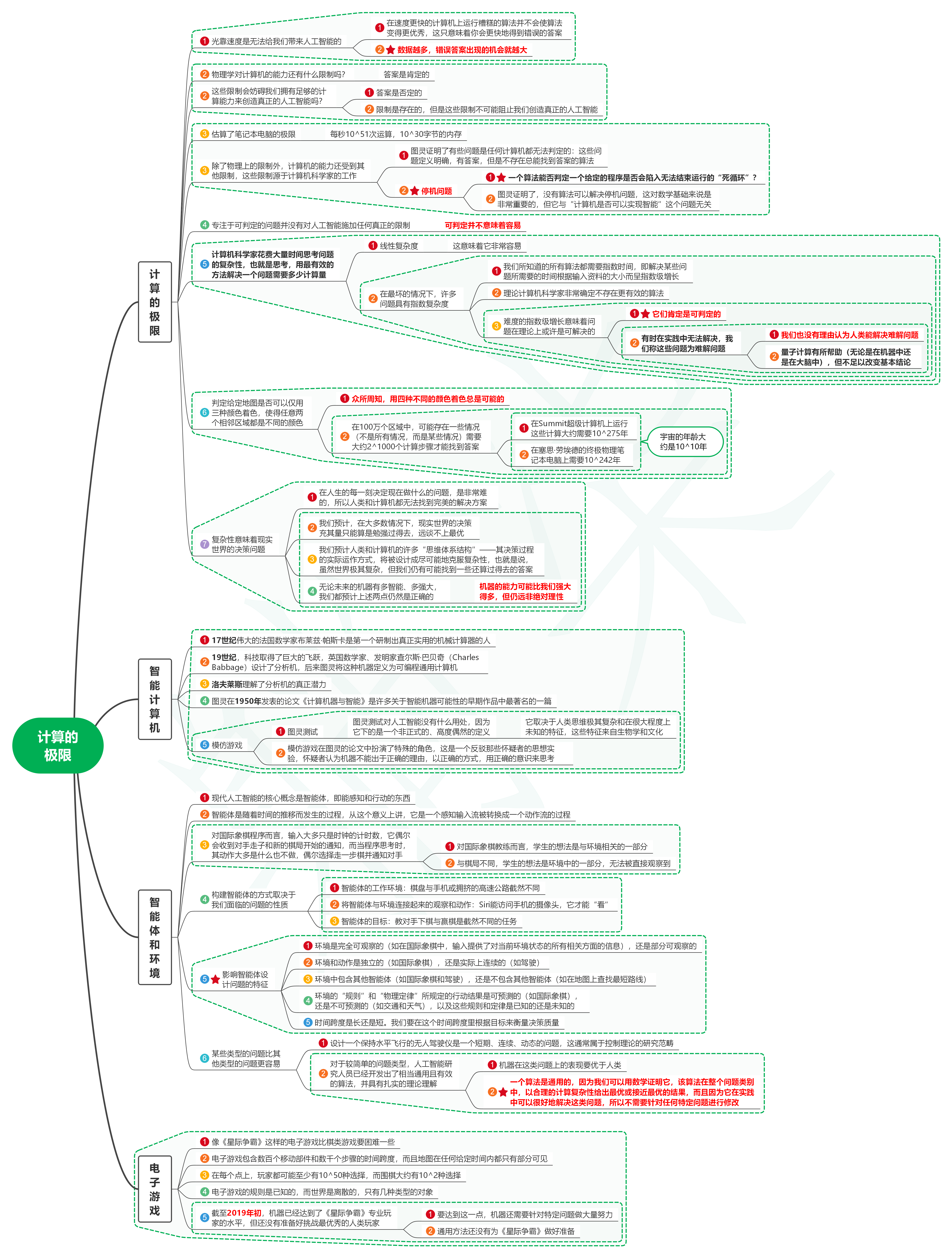
1. 计算的极限
1.1. 光靠速度是无法给我们带来人工智能的
1.1.1. 在速度更快的计算机上运行糟糕的算法并不会使算法变得更优秀,这只意味着你会更快地得到错误的答案
1.1.2. 数据越多,错误答案出现的机会就越大
1.2. 物理学对计算机的能力还有什么限制吗?
1.2.1. 答案是肯定的
1.3. 这些限制会妨碍我们拥有足够的计算能力来创造真正的人工智能吗?
1.3.1. 答案是否定的
1.3.2. 限制是存在的,但是这些限制不可能阻止我们创造真正的人工智能
1.4. 估算了笔记本电脑的极限
1.4.1. 每秒1051次运算,1030字节的内存
1.5. 除了物理上的限制外,计算机的能力还受到其他限制,这些限制源于计算机科学家的工作
1.5.1. 图灵证明了有些问题是任何计算机都无法判定的:这些问题定义明确,有答案,但是不存在总能找到答案的算法
1.5.2. 停机问题
1.5.2.1. 一个算法能否判定一个给定的程序是否会陷入无法结束运行的“死循环”?
1.5.2.2. 图灵证明了,没有算法可以解决停机问题,这对数学基础来说是非常重要的,但它与“计算机是否可以实现智能”这个问题无关
1.6. 专注于可判定的问题并没有对人工智能施加任何真正的限制
1.6.1. 可判定并不意味着容易
1.7. 计算机科学家花费大量时间思考问题的复杂性,也就是思考,用最有效的方法解决一个问题需要多少计算量
1.7.1. 线性复杂度
1.7.1.1. 这意味着它非常容易
1.7.2. 在最坏的情况下,许多问题具有指数复杂度
1.7.2.1. 我们所知道的所有算法都需要指数时间,即解决某些问题所需要的时间根据输入资料的大小而呈指数级增长
1.7.2.2. 理论计算机科学家非常确定不存在更有效的算法
1.7.2.3. 难度的指数级增长意味着问题在理论上或许是可解决的
1.7.2.3.1. 它们肯定是可判定的
1.7.2.3.2. 有时在实践中无法解决,我们称这些问题为难解问题
1.7.2.3.2.1. 我们也没有理由认为人类能解决难解问题
1.7.2.3.2.2. 量子计算有所帮助(无论是在机器中还是在大脑中),但不足以改变基本结论
1.8. 判定给定地图是否可以仅用三种颜色着色,使得任意两个相邻区域都是不同的颜色
1.8.1. 众所周知,用四种不同的颜色着色总是可能的
1.8.2. 在100万个区域中,可能存在一些情况(不是所有情况,而是某些情况)需要大约2^1000个计算步骤才能找到答案
1.8.2.1. 在Summit超级计算机上运行这些计算大约需要10^275年
1.8.2.2. 在塞思·劳埃德的终极物理笔记本电脑上需要10^242年
1.8.2.3. 宇宙的年龄大约是10^10年
1.9. 复杂性意味着现实世界的决策问题
1.9.1. 在人生的每一刻决定现在做什么的问题,是非常难的,所以人类和计算机都无法找到完美的解决方案
1.9.2. 我们预计,在大多数情况下,现实世界的决策充其量只能算是勉强过得去,远谈不上最优
1.9.3. 我们预计人类和计算机的许多“思维体系结构”——其决策过程的实际运作方式,将被设计成尽可能地克服复杂性,也就是说,虽然世界极其复杂,但我们仍有可能找到一些还算过得去的答案
1.9.4. 无论未来的机器有多智能、多强大,我们都预计上述两点仍然是正确的
1.9.4.1. 机器的能力可能比我们强大得多,但仍远非绝对理性
2. 智能计算机
2.1. 17世纪伟大的法国数学家布莱兹·帕斯卡是第一个研制出真正实用的机械计算器的人
2.2. 19世纪,科技取得了巨大的飞跃,英国数学家、发明家查尔斯·巴贝奇(Charles
Babbage)设计了分析机,后来图灵将这种机器定义为可编程通用计算机

 浙公网安备 33010602011771号
浙公网安备 33010602011771号