
[寻路][导航][算法][地图开发]寻路算法的对比优势1
作者:伍一峰
链接:http://www.zhihu.com/question/20298134/answer/22861904
来源:知乎
著作权归作者所有。商业转载请联系作者获得授权,非商业转载请注明出处。
链接:http://www.zhihu.com/question/20298134/answer/22861904
来源:知乎
著作权归作者所有。商业转载请联系作者获得授权,非商业转载请注明出处。
rts中的寻路系统一般需要满足有以下几个条件,
1. 效率高,因为rts普遍地图大,单位多,所以处理效率很重要
2. 易编辑,以便于level design
3. 效果真实,如能找出最优(或者是看上去合理)
4. 可以应对动态的游戏世界,例如起建筑
如 @王亞暉 所说,一般用于寻路的算法是A Star,
首先是A Star有利用到启发式函数(Heuristic Function)[1],和另一个算法Dijkstra(A Star的无启发函数版)相比可能会更有效率,因为启发函数设计得当,可以大大减少计算的数量。
因为启发函数的估计往往不是精确的,所以A Star [删:不像Dijkstra,] 不一定能找出人类人之上的最优解,但是对于游戏来说,看上去合理就行。
然而用A Star作为寻路算法,仅仅是寻路系统的基本部分。
作为系统,它需要有易编辑的特性。
这就涉及到A Star中每个节点(Node)的表现方式。
最基本的表现方式是方块(Tile),如下图 [2]
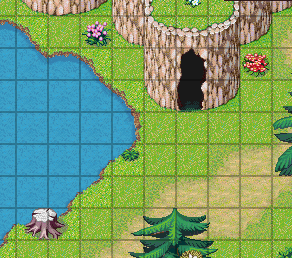
其中,可以将山洞所占的的几个方块设为“Not Movable”,这样A Star就会不会考虑到这几个方块,系统所生成的路径就不会碰到山洞。
用方块作为A Star节点优点是简单,
不过也有比较多的问题,
第一是,如果地图很大的话,方块就会很多,这样A Star的节点就会大大增加,处理的时间相应地会增大。
第二是,单位的移动只能是上下左右,最多加上斜行,总共八个方向,不够真实
第三是,单位的体积大小不一样的话,大单位的图像可能会覆盖到“Not Movable”部分。以上面的图片为例,一条路径会经过在山洞边边,一个占四个方块大小的巨人走过的话,就会走在山洞上面。
为了解决上面的一些问题,我们可以使用路经点(Waypoint)来做A Star节点,如下图 [3]
图中的红色的路径点代替了方块,成为A Star节点,这样的好处是我们可以自由地添加路径点,可以相对地减少A Star节点数目,
同时也单位也可以按照设计师设计的方法去走。
然而,从上图也可以看出它的问题不少,
第一是,如果是大地图,路径点数量太少会显得生硬。
第二是,需要考虑得面面俱到,不然一条直路忘了加路径点,单位就会“绕”(看上去)过去。
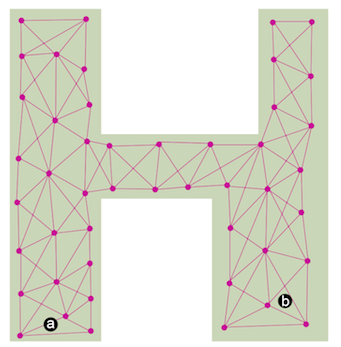
为了更好地解决以上所述的问题,导航网格(Navmesh or Navigation Mesh)出现了,如下图所示 [4]

现在,灰白色的多边形成为了A Star节点。
它解决了上面所出现的所有问题,
第一,从图中可以看出,节点的数目大大减少,因为多边形可以覆盖任意区域,不用限制成方块或点。除了提升计算速度之外,编辑导航网格的效率也大大增加。
第二,通过计算直线两点和导航网格的相邻点(上图蓝色点)的位置关系,可以计算出两点是不是可以直接行走而没有阻碍物。例如上图从A点到B点通过计算可以得出可以直线行走,不用想方块和导航点那样绕来绕去。
第三,在转角位不一定要经过相邻点,可以加上单位的体积半径,这样不同体积的单位都可以合理地通过转角。
对于建筑的考虑
在RTS中的寻路系统,还有一个很重要的话题,就是要可以应对动态的游戏世界。
一个简单的例子就是起建筑。
在一些需要频繁修改游戏世界的场景中,以方块为节点会更加容易作出修改 [14] ——只需要将建筑所占的方块的“Not Movable”修改成“Movable”。例如著名的塔防游戏《Field Runner》,应该是利用这种方法来实现的,而且作为塔防,《Field Runner》可以只在建塔之后寻路一次,缓存起来就行。所以在这一场景中方块又成为了一个方便快捷的选择。
然而,导航网格也是可以动态修改的,不过开发难度会更大,而且运行中动态修改可能会造成延迟。有一些方法可以优化,例如动态地修改局部导航网格 [12],或者是完全不修改,而将建筑看作局部的障碍物用另一套机制来应对 [13]。
其实除了A Star算法之外,还有其他算法,或者技巧,可以用于RTS的寻路系统,这里简单地介绍一下,
例如Potential Field,
它是将地图用一个矩阵来表示,矩阵储存着大小不同的电势(整数)。
例如,正电势表示吸引,负电势表示排斥。
而游戏中的单位本身是一个负电势,游戏以一个数组储存所有单位的电势和位置 [7]。
这样,在计算一个单位需要怎么从A点到B点时,我们可以用一个新的矩阵将目的地B点设成正电势,并以不同方式(如圆形、四边形等)辐射开来,离B点越远电势越低,直到0。
然后将地图矩阵,目的地矩阵,和所有单位数组的电势相加,得出一个新的、反映当前游戏世界的电势矩阵,
然后单位再选择周围所有电势点中的最高电势点去走。
不过这里坑很多,因为它本质上是Greedy Algorithm,所以它未必能找出解。[5]
然而在某些设定中,例如在没有过于复杂地形,并且需要单位自动不相互覆盖的情况下,Potential Field还是可以完成任务 [8]。
因为相比A Star的寻路系统来说,这个方法会比较简单。
还有Flocking Behavior,
在对于一大群单位的寻路,计算量是很大的,而且往往会有很多的重复,这些都是可以避免的。
如果单位的移动是利用Steering Behavior [9] 来实现的话,
那么就可以为其中一个单位,称之为Leader,计算路径(例如用导航网格),
然后其他单位按照以下Flocking原则来移动:
1. 分离,避开相邻单位
2. 一致,和整体的移动方向一致,这里应该是Leader的移动方向
3. 聚合,向整体的平均位置靠拢
这样的话,就可以降低寻路的计算量,并且得到更加真实的群体单位行进效果。
另外一个技巧和Flocking Behavior类似 [10],
对于不用Steering Behavior的一大群单位,
可以将他们设为一个组,计算这个组的路径(并且要考虑到这个组的半径以便通过转角位),
然后给每个单位offset一个适当的距离,
如果遇到小的通道,例如门,可以适当调整offset。
《全面战争》里面一个队伍40人,大概用的就是这种方法 [11]。
还有一个优化技巧是Chunk [15]。
这个技巧和 @王亞暉 所提到的“先切分地图然后分块去做”应该是一致的。
在规模宏大的地图中,为了进一步提高寻路速度,可以在编辑地图时将一些节点处理成一个Chunk,它有入口和出口,并且不同Chunk之间需要连接起来。
从A点移动到B点,首先先在Chunk之间做寻路,得到一系列的Chunk,
在Chunk 1的时候只需要在Chunk 1中寻路,去到Chunk 2的时候就只在Chunk 2中寻路。
它本质上是将地图分为两种维度,一种是粗略的Chunk,一种是Chunk里面的节点(可以是方块,路径点,导航网格),并分开进行处理。有种空间分割(Space Partition)的味道在里面。
这个方法我没有真正用过,还望大家补充。
还有D Star,它主要运用在机器人领域 [6],可以在未知环境中寻路,不过我没接触过。
1. 效率高,因为rts普遍地图大,单位多,所以处理效率很重要
2. 易编辑,以便于level design
3. 效果真实,如能找出最优(或者是看上去合理)
4. 可以应对动态的游戏世界,例如起建筑
如 @王亞暉 所说,一般用于寻路的算法是A Star,
首先是A Star有利用到启发式函数(Heuristic Function)[1],和另一个算法Dijkstra(A Star的无启发函数版)相比可能会更有效率,因为启发函数设计得当,可以大大减少计算的数量。
因为启发函数的估计往往不是精确的,所以A Star [删:不像Dijkstra,] 不一定能找出人类人之上的最优解,但是对于游戏来说,看上去合理就行。
然而用A Star作为寻路算法,仅仅是寻路系统的基本部分。
作为系统,它需要有易编辑的特性。
这就涉及到A Star中每个节点(Node)的表现方式。
最基本的表现方式是方块(Tile),如下图 [2]
其中,可以将山洞所占的的几个方块设为“Not Movable”,这样A Star就会不会考虑到这几个方块,系统所生成的路径就不会碰到山洞。
用方块作为A Star节点优点是简单,
不过也有比较多的问题,
第一是,如果地图很大的话,方块就会很多,这样A Star的节点就会大大增加,处理的时间相应地会增大。
第二是,单位的移动只能是上下左右,最多加上斜行,总共八个方向,不够真实
第三是,单位的体积大小不一样的话,大单位的图像可能会覆盖到“Not Movable”部分。以上面的图片为例,一条路径会经过在山洞边边,一个占四个方块大小的巨人走过的话,就会走在山洞上面。
为了解决上面的一些问题,我们可以使用路经点(Waypoint)来做A Star节点,如下图 [3]
图中的红色的路径点代替了方块,成为A Star节点,这样的好处是我们可以自由地添加路径点,可以相对地减少A Star节点数目,
同时也单位也可以按照设计师设计的方法去走。
然而,从上图也可以看出它的问题不少,
第一是,如果是大地图,路径点数量太少会显得生硬。
第二是,需要考虑得面面俱到,不然一条直路忘了加路径点,单位就会“绕”(看上去)过去。
为了更好地解决以上所述的问题,导航网格(Navmesh or Navigation Mesh)出现了,如下图所示 [4]
现在,灰白色的多边形成为了A Star节点。
它解决了上面所出现的所有问题,
第一,从图中可以看出,节点的数目大大减少,因为多边形可以覆盖任意区域,不用限制成方块或点。除了提升计算速度之外,编辑导航网格的效率也大大增加。
第二,通过计算直线两点和导航网格的相邻点(上图蓝色点)的位置关系,可以计算出两点是不是可以直接行走而没有阻碍物。例如上图从A点到B点通过计算可以得出可以直线行走,不用想方块和导航点那样绕来绕去。
第三,在转角位不一定要经过相邻点,可以加上单位的体积半径,这样不同体积的单位都可以合理地通过转角。
对于建筑的考虑
在RTS中的寻路系统,还有一个很重要的话题,就是要可以应对动态的游戏世界。
一个简单的例子就是起建筑。
在一些需要频繁修改游戏世界的场景中,以方块为节点会更加容易作出修改 [14] ——只需要将建筑所占的方块的“Not Movable”修改成“Movable”。例如著名的塔防游戏《Field Runner》,应该是利用这种方法来实现的,而且作为塔防,《Field Runner》可以只在建塔之后寻路一次,缓存起来就行。所以在这一场景中方块又成为了一个方便快捷的选择。
然而,导航网格也是可以动态修改的,不过开发难度会更大,而且运行中动态修改可能会造成延迟。有一些方法可以优化,例如动态地修改局部导航网格 [12],或者是完全不修改,而将建筑看作局部的障碍物用另一套机制来应对 [13]。
其实除了A Star算法之外,还有其他算法,或者技巧,可以用于RTS的寻路系统,这里简单地介绍一下,
例如Potential Field,
它是将地图用一个矩阵来表示,矩阵储存着大小不同的电势(整数)。
例如,正电势表示吸引,负电势表示排斥。
而游戏中的单位本身是一个负电势,游戏以一个数组储存所有单位的电势和位置 [7]。
这样,在计算一个单位需要怎么从A点到B点时,我们可以用一个新的矩阵将目的地B点设成正电势,并以不同方式(如圆形、四边形等)辐射开来,离B点越远电势越低,直到0。
然后将地图矩阵,目的地矩阵,和所有单位数组的电势相加,得出一个新的、反映当前游戏世界的电势矩阵,
然后单位再选择周围所有电势点中的最高电势点去走。
不过这里坑很多,因为它本质上是Greedy Algorithm,所以它未必能找出解。[5]
然而在某些设定中,例如在没有过于复杂地形,并且需要单位自动不相互覆盖的情况下,Potential Field还是可以完成任务 [8]。
因为相比A Star的寻路系统来说,这个方法会比较简单。
还有Flocking Behavior,
在对于一大群单位的寻路,计算量是很大的,而且往往会有很多的重复,这些都是可以避免的。
如果单位的移动是利用Steering Behavior [9] 来实现的话,
那么就可以为其中一个单位,称之为Leader,计算路径(例如用导航网格),
然后其他单位按照以下Flocking原则来移动:
1. 分离,避开相邻单位
2. 一致,和整体的移动方向一致,这里应该是Leader的移动方向
3. 聚合,向整体的平均位置靠拢
这样的话,就可以降低寻路的计算量,并且得到更加真实的群体单位行进效果。
另外一个技巧和Flocking Behavior类似 [10],
对于不用Steering Behavior的一大群单位,
可以将他们设为一个组,计算这个组的路径(并且要考虑到这个组的半径以便通过转角位),
然后给每个单位offset一个适当的距离,
如果遇到小的通道,例如门,可以适当调整offset。
《全面战争》里面一个队伍40人,大概用的就是这种方法 [11]。
还有一个优化技巧是Chunk [15]。
这个技巧和 @王亞暉 所提到的“先切分地图然后分块去做”应该是一致的。
在规模宏大的地图中,为了进一步提高寻路速度,可以在编辑地图时将一些节点处理成一个Chunk,它有入口和出口,并且不同Chunk之间需要连接起来。
从A点移动到B点,首先先在Chunk之间做寻路,得到一系列的Chunk,
在Chunk 1的时候只需要在Chunk 1中寻路,去到Chunk 2的时候就只在Chunk 2中寻路。
它本质上是将地图分为两种维度,一种是粗略的Chunk,一种是Chunk里面的节点(可以是方块,路径点,导航网格),并分开进行处理。有种空间分割(Space Partition)的味道在里面。
这个方法我没有真正用过,还望大家补充。
还有D Star,它主要运用在机器人领域 [6],可以在未知环境中寻路,不过我没接触过。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号