
[转]电子战及电子支援措施(ESM)
以下转自:电子战系统、电子支援系统,有什么区别
舰艇上的电子战系统是一个统称,包括电子支援措施(ESM,Electronic Support Measures)和电子对抗措施(ECM,Electronic Counter Measures)两类。
电子支援措施(ESM)是频谱空间中的“侦察兵”。依靠高灵敏度的接收机,电子支援系统可以截获周边的雷达信号,测定辐射源的工作频率、方位、脉冲宽度、脉冲重复频率等参数。
利用电子支援系统,舰艇可以进行不间断的电子情报收集,可通过电子设备类型、数量来预判敌方兵力部署和作战意图。将截获信号与数据库比对,还能完成对目标的识别,实现在不依赖雷达、不打破无线电静默的前提下,进行海空环境监视。这对于无法安装大型雷达的小型舰艇或隐蔽性要求高的潜艇部队来说,尤为重要。
▲ ESM系统是潜艇隐蔽获取周边态势信息的重要手段,“奥斯卡”Ⅲ级潜艇,指挥台上升起的桅杆中,最高最粗的那个是雷达和ESM天线,后面有圆锥形天线罩的是卫星通信天线。
另外,即便是同一型号的雷达,每部产品的实际辐射特性,也会有细微差别,构成了其独一无二的“电子指纹”。如果电子情报数据库足够详实,甚至可以实现对特定平台,比如具体哪一艘军舰的识别。
一旦截获制导雷达跟踪信号、导弹控制信号或末制导雷达寻的信号,电子支援系统可以迅速向己方发出威胁告警,并引导电子对抗措施及时释放干扰。
电子对抗措施(ECM)包含了进攻性的有源电子干扰和防御性的有源无源诱饵等自卫干扰手段。电子支援系统截获并分析出的敌方辐射源类型、频率、方位等信息后,电子干扰就可以大举“进攻”。
针对不同的雷达,可采取噪声干扰和欺骗干扰多种形式。噪声干扰非常“直白”,就是靠功率来“硬刚”,使对方的雷达回波“淹没”在噪声信号电平中,无法检出。欺骗干扰更加“阴险”,可以概括为“接、化、发”三个字:“接”,截获敌雷达信号;“化”,将信号进行处理;“发”,将处理后的信号发回去,从而产生距离或速度、角度等信息不同的虚假回波信号,让敌方雷达无法判别真实目标。欺骗干扰很适合对导弹的末制导雷达进行干扰。
▲ 早期的ESM天线阵列很容易识别,图为上世纪60年代澳大利亚海军舰艇桅杆顶端的UA-8电子侦察天线。
ESM和ECM的天线,过去多为分散配置,外形也不同。ESM系统要对信号从空间上进行幅度、相位的比较,来实现测向,因此需要采用阵列天线。ECM系统的干扰天线有两种配置:需压制多个目标时,使用宽波束喇叭天线;需集中功率对抗时,采用窄波束高增益天线(比如类似雷达的锅状)。
随着技术发展,多波束天线阵开始应用于舰载电子战系统,使其对抗多目标的能力大大增强。比如广泛装备美军舰艇并出口十余个国家和地区的AN/SLQ-32(V)系统,从截获目标信号到发出干扰信号仅需十毫秒,干扰功率可达兆瓦级,可同时使用140个波束对抗80个目标。
▲ 美国海军的AN/SLQ-32电子战系统诞生于20世纪70年代,经过不断改进升级仍广泛安装在各类舰艇上,图为AN/SLQ-32(V)3型,有多个不同频段的接收和干扰天线阵面,安装在舰艇两侧。
▲ 2016年投产的AN/SLQ-32(V)6型将天线阵面整合为一个,外观更为简洁。
现在,又有了采用相控阵体制的新一代电子战系统,能够在极短时间内将干扰波束精确地对准目标方向,同时干扰能量分配更为灵活,有效干扰功率和多目标应对能力进一步提升。而且电子侦察、电子干扰系统可共用一组天线,外部设备更为简洁,有利于舰艇隐身。
▲ 采用有源电扫阵列的新一代电子战系统结合了集成桅杆技术,实现了雷达、电子战、通信射频功能共享,图为美国海军EW/IO/COMMS测试样机。
以下转自:电子战及电子支援措施(ESM)
第二次世界大战以来,雷达和电子对抗技术都得到了很大的发展。现代军事行动在很大程度上依靠用于监视、武器控制、通信和导航的电磁(EM)系统;如下图所示。因此使用和控制 EM 频谱至关重要。

图源自网络
电子战(EW)是利用电磁能量削弱、“致盲”雷达的军事行动。其依赖电子情报(ELINT)设备捕捉雷达发射的电磁信号,在相关数据库中进行信息排序分类,然后把信息用于解读捕捉到的雷达信号,了解雷达系统的特性,最后编制对抗雷达的行动。
电子战由两大部分构成:电子支援措施(ESM)和电子对抗措施(ECM)。事实上,电子战以减弱雷达能力为目的。而雷达以能在电子战条件下成功实现功能为目标;这一目标的实现依赖于电子反对抗措施(ECCM)。
电子支援措施(ESM)是 EW 的一部分,包括对辐射电磁能的搜寻、截获、定位、记录和分析等行动,即电子侦察。因此,ESM 是电子战的信息源,可为进行 ECM、威胁检测、告警及逃逸提供所需的 EW 信息。
电子对抗措施(ECM)是 EW 的一部分,其功能是阻止或削弱雷达对电磁频谱的有效运用。电子反对抗措施(ECCM)是雷达采用的一系列措施,在敌方使用 EW 情况下,仍能确保雷达有效地运用电磁频谱。
电子支援措施(ESM)

ESM 通常包括若干检测和测量接收机以及专门用于截获雷达发射信号的实时处理器。对某些特定辐射源的识别是基于 ELINT 比较的。
辐射源位置可通过某些方法得到,如单个平台顺序方位测量的三角测量、到达时间差(DToA)或双曲线定位以及相位差变化率(PDR)等。数字接收机技术及信号处技术的极大发展,使用诸如到达波时频差之类的技术将提高单个和多个平台的空间定位;这将使得 EW 可用于提示目标瞄准系统。
雷达截获依赖于对雷达发射的脉冲或连续波(CW)信号的接收和测量。ESM 操作的作战场景通常是脉冲信号,其大小是 个脉冲/秒(pps)。下图为某信号侦察机。

图源自网络
ESM 测量出每个被检测脉冲的中心频率、幅度、脉宽、到达时间(ToA)和方向,将其转换成数字格式,然后打包成一个脉冲描述字(PDW)。接着 PDW 信息串被送往脉冲分选处理器,该处理器将其分检成属于不同辐射源的信号并识别出其脉冲重复间隔(PRI)值及调制规则(随机抖动、参差、切换)。再与辐射源数据库作进一步对比,这个数据库包含每个辐射源的特征参数的范围(频率、脉宽、PRI)、相关的捷变模式(随机、参差等)、天线扫描方向图形状及扫描周期以产生带识别评分的辐射源清单。
ESM 接收机一般用于控制 ECM 的部署和运行;ESM 与 ECM 间的联系通常是自动的。单个所接收的雷达脉冲信号由许多可测量的参数表征。
设计分检系统时,测量数据的可用性、分辨率和精度必须全部加以考虑,这是因为所采用的处理方法依赖于现有的参数数据组。显然,参数测量的分辨率和精度越高,脉冲分选处理器完成任务越有效。
但是,从 ESM 系统外部(如多路径)、ESM 系统内部(如定时限制、接收期间的静止时间)以及从成本效率考虑等,对测量过程有限制。
由于目标方向在脉冲间不变化,到达角是实现有效分检的最重要的分类参数。因此,为了既达到 360° 空间覆盖,又获得基于脉冲的到达角测量,常采用比幅单脉冲天线或多基干涉测量(比相)系统。比幅单脉冲天线如下图所示。

图源自网络
载频是用于分检的第二个最重要的脉冲参数。普通的频率测量方法是利用搜索式超外差接收机,其优点是具有高的灵敏度和好的频率分辨率以及对附近辐射源干扰的抗干扰性强。
然而,与旋转定向测量系统相似,这种接收机的截获概率低。如果发射脉冲是频率捷变的(随机变化的),或者是频率跳变的(按规则变化的),情况将更坏。
一种允许用于宽带频率测量的常用方法是基于干涉测量设备上的,这些设备可提供高精度瞬时频率测量并能抗低强度的信号干扰。
在宽瞬时频带超外差接收机后接一组相邻接收机通道组,可提供更高的灵敏度和更高的截获概率。现在首选的方法是数字接收机,它集成了宽带谱分析和一些后处理功能,如脉内调制测量和波形编码侦察。
由于多路径传输所导致的严重恶化,脉宽是一种不可靠的分类参数。多路径传输会使脉冲包络严重畸变,如脉冲出现长的拖尾,脉峰位置甚至会产生偏移。
脉冲的 ToA 可取为信号超过某一门限的瞬间,但是在有噪声和畸变存在时,这是一种结果多变的测量值。尽管如此,ToA 常用于测量雷达的 PRI。
脉冲幅度取为其峰值。动态范围必须至少考虑信号幅度波动和扫描方向图起伏三个数量级的变化。实际上,60dB 的瞬时动态范围看来为最小值,在许多应用场合应更大。幅度测量(与ToA一起)可用于获取辐射源的扫描方向图。
雷达截获系统的分类基于它们提供的电子环境的表征类型。雷达告警接收机(RWR)用做一种机载设备时,通过座舱显示器向飞行员通告敌方导弹上有制导雷达之类所构成的威胁的存在和相对的方向。战机传感器图如下图所示。

图源自网络
虽然单程传播与双程传播相比具有作用距离的优势,这使得雷达能截获比自身的平台探测距离更远的距离来的信号,但是搜索雷达不是这些系统的主要目标。要求灵敏度值的范围是 -38~-60dBm(相对于全向同性的 dBmW)。
ESM 是复杂的系统,通常具有产生其部署区域内完整电子作战等级画面的能力以及告警功能。这类系统可探测和分析辐射源波形与扫描模式。对工作环境侦察的反应时间可能小于 10s,虽然危险辐射源和告警功能要求更快的响应。要求的灵敏度范围为 -55dBm 到好于 -80dBm。
ELINT 系统与 ESM类似,但可能不要求100% 的截获概率。反应时间可能为几分钟或几小时。其目的不是在工作环境中辐射源一打开就探测到,而是提供辐射源的详细特征为 RWR 和 ESM 系统产生识别数据库。ELINT 系统的灵敏度可能达到 -90dBm,但它们不需要提供 360° 监视,并且它们可以用几个定向天线达到这样的性能。
RWR 探测雷达辐射的距离主要受其接收机灵敏度及雷达辐射功率的影响。可以通过基本的单程信标方程计算告警距离,方程提供在RWR处的信噪比(SNR)。此信噪比 在 为

式中, 是雷达辐射功率; 是RWR到雷达的距离; 是雷达发射天线增益; 是RWR的接收天线增益: 是雷达波长; 是RWR的总系统噪声功率; 是损耗。该上式是计算 RWR 性能的基础。
需注意 RWR 的探测距离反比于 ,而雷达探测目标检测距离反比于 ,因此,RWR 可在远大于雷达本身探测距离的地方探测到辐射的雷达。
在雷达与截获接收机的对抗中,雷达的优势在于使用匹配滤波器,这是截获接收机无法复制的(它不知道准确的雷达波形),而截获接收机却有 的距离优势,这是单程对双程雷达传播带来的优势。为了赢得“看得见但不被看到”这场战争,雷达应用低截获概率。
目录
一、创建方案
二、存在干扰辐射时的雷达探测
2.1 创建射频发射器
2.2 创建单基地雷达
2.3 模拟单站检测
三、射频辐射的无源检测
3.1 创建 ESM 传感器
3.2 模拟 ESM 检测
四、单基地雷达的无源检测
五、程序
此示例说明如何使用对有源和无源雷达传感器的输出进行建模和仿真。在此示例中,将观察射频 (RF) 干扰如何影响雷达的检测性能。此外,还可以使用无源雷达传感器来估计 RF 干扰的位置和类型。
一、创建方案
评估雷达的跟踪性能需要对射频 (RF) 场景进行建模。建模工作流程如下:
-
产生射频辐射。
-
传播排放并反映平台的这些排放。
-
接收发射,计算干扰损耗并生成检测结果。
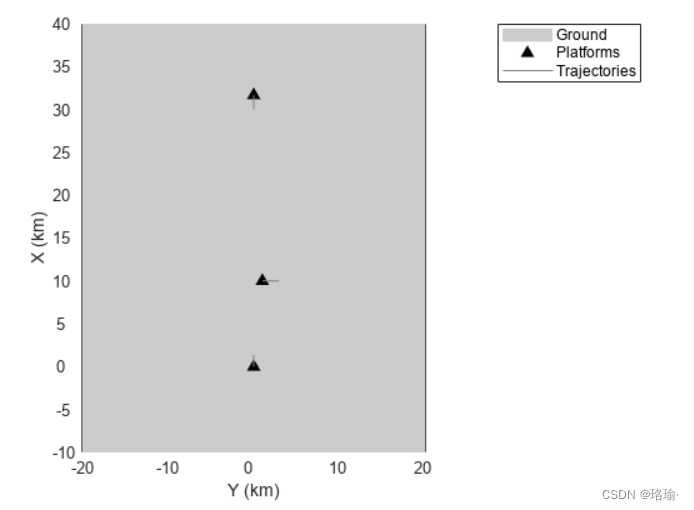
在此示例中,将使用由三个平台组成的方案执行以下每个步骤:
-
机载平台从场景底部以 500 公里/小时的速度向北飞行
-
机载平台从场景顶部以 600 公里/小时的速度向南飞行
-
机载平台在场景中以700公里/小时的速度向东飞行
首先,创建场景并设置场景持续时间,然后创建三个机载平台。
用于创建显示方案中的平台及其轨迹的显示。
二、存在干扰辐射时的雷达探测
通常,雷达在其他不良RF发射干扰雷达发射的波形的环境中工作。发生这种情况时,雷达在干扰信号方向上的检测性能会下降。将RF发射器连接到场景底部的平台(第一个平台),将雷达连接到场景顶部的平台(第二个平台)。
2.1 创建射频发射器
使用对象对射频发射进行建模。发射器处于前瞻性配置,方位角视场为 20 度,以包括场景中的其他两个平台。有效各向同性辐射功率 (EIRP) 设置干扰信号的强度。波形类型是用户定义的值,用于枚举方案中存在的各种波形类型。对于此方案,请使用值 0 指示噪声波形类型。将发射器连接到第一个平台。
2.2 创建单基地雷达
为第二个平台配备单基地雷达。用于对这种类型的雷达进行建模。首先,使用创建单基地雷达。配置雷达的安装方向,以便扫描其平台前面的方位角扇区。启用 INS 输入,以便雷达可以使用平台的位姿估计器在场景坐标中输出检测。启用干扰输入端口,以便将上述发射器产生的干扰信号传递到雷达。将雷达连接到第二个平台。
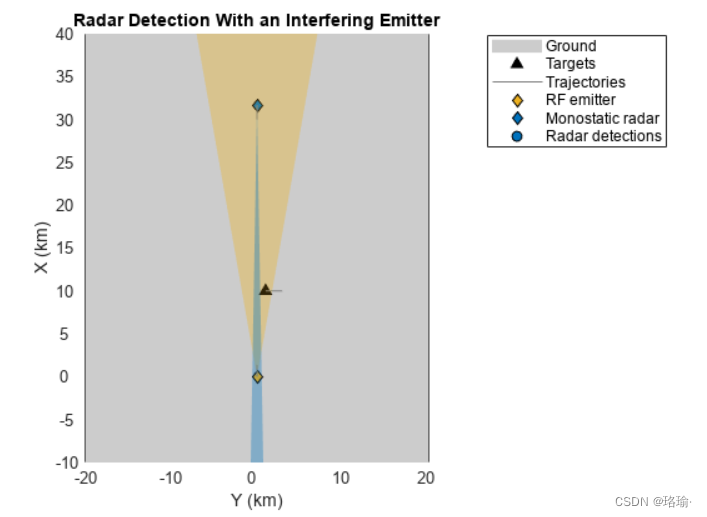
在上图中,携带前视雷达的平台显示为蓝色菱形,雷达的当前视野是源自平台的蓝色区域。在图的底部,承载干扰RF发射的平台显示为黄色菱形,发射器的当前视场是相应的黄色区域。未连接任何发射器或传感器的平台称为目标,并显示为黑色三角形。
2.3 模拟单站检测
在多速率方案中,可以找到一个更新速率,该速率是方案中定义的所有传感器和发射器速率的通用分频器,也可以使用连续更新,当您调用时,它会自动将方案推进到下一个有效更新时间。
对于以下循环中的每个步骤,请使用:
-
advance根据轨迹移动所有平台。 -
emit以更新发射的传输方向。platEmit -
propagate将发射直接传播到发射器视野内场景中的每个平台。接收直接路径发射的每个平台都会产生单次反弹反射,该反射也会作为反射发射传播到其他每个平台。 -
detect从收到的排放生成检测。platRadar
下图显示了发射极向雷达传感器的发射传播。

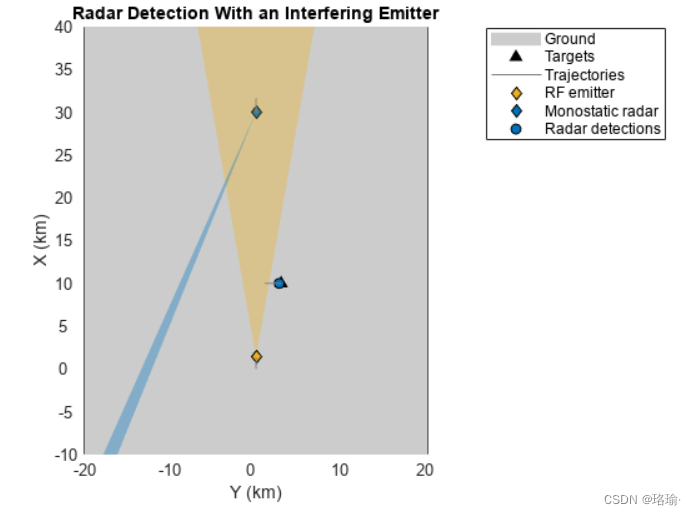
上图显示雷达(以蓝色显示)只能在场景中检测到目标。检测显示为蓝色的填充圆圈,并且每当雷达的视野(即波束宽度)扫过目标时都会进行检测。但是,当雷达的波束扫过发射平台(以黄色显示)时,不会产生检测,因为该平台产生的干扰会阻止雷达检测到。
三、射频辐射的无源检测
在上一节中,雷达无法检测到发射平台的位置,因为该平台的发射掩盖了雷达自身的发射。然而,这种强烈的辐射可以通过侦听RF辐射的无源传感器来检测和识别。这些传感器通常被称为电子支持措施(ESM)。这些传感器通常侦听很宽的频率范围,并尝试识别独特的发射器、这些发射器发射的到达方向,以及尽可能识别发射器使用的波形类型。
3.1 创建 ESM 传感器
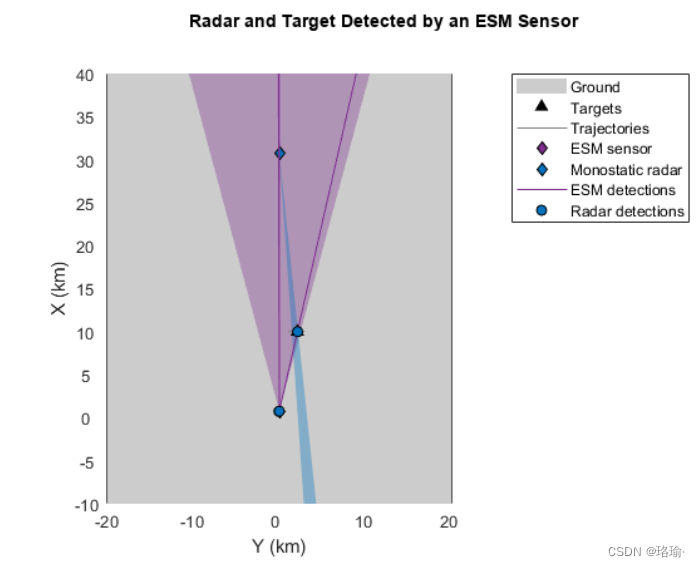
重用上一节中的场景,但将第一个平台上的单基地雷达替换为 ESM 传感器。用于对 ESM 传感器进行建模,并确保传感器的配置使其中心频率和带宽包括发射器的射频频谱。否则,它将无法检测到发射器。用 ESM 传感器替换第二个平台上的雷达。相应地更新可视化效果。
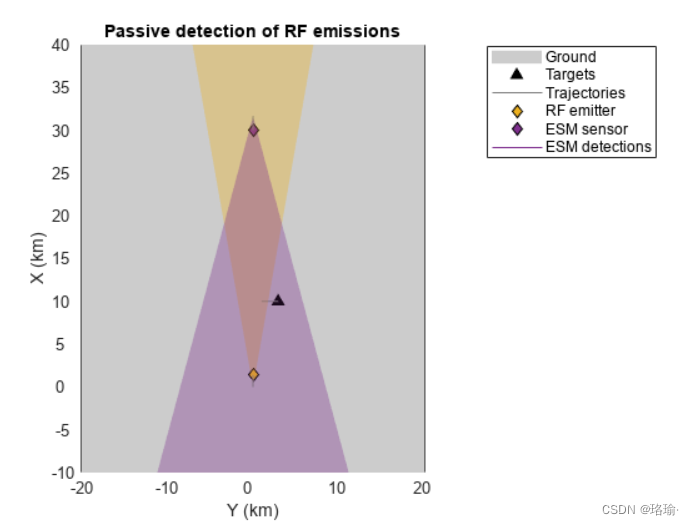
在上图中,雷达被安装在第二个平台上的ESM传感器所取代。ESM传感器的视场以洋红色显示,包括发射平台和目标平台。
3.2 模拟 ESM 检测
现在使用 ESM 传感器而不是雷达模拟检测。请注意,由于ESM传感器是无源传感器,因此它无法定位发射平台,但指示平台发射的到达方向。这些仅角度检测显示为从ESM传感器向发射平台发出的光线。
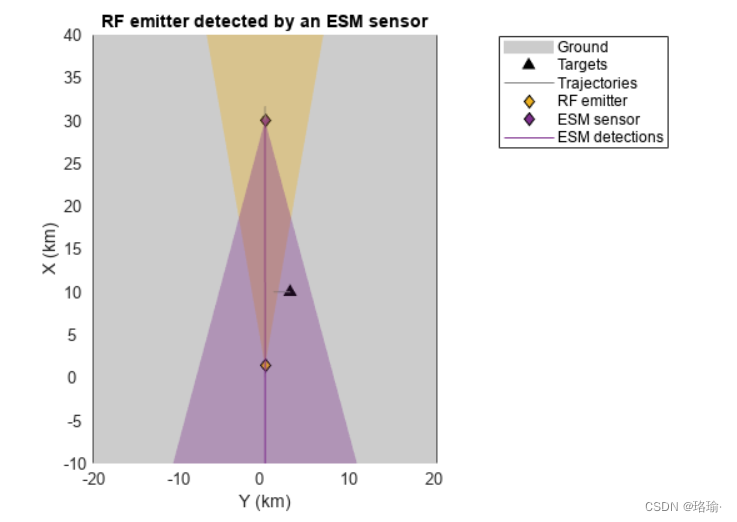
ESM传感器检测射频发射并估计其到达方向。该估计值由源自传感器并紧密经过发射器的洋红色线显示。角度估计是嘈杂的,这就是为什么线不直接穿过发射器的位置。ESM 传感器在其报告的检测中对波形类型进行分类。对于此发射器,它报告发射器使用的噪声波形类型:0。
传感器检测到的发射信号的信噪比(SNR)非常大,为185 dB。由于RF发射器具有高功率,ESM传感器也会检测到目标发射波形的反射。在模拟开始 2 秒时,当目标位于发射器的视野内时,可以看到这种情况。
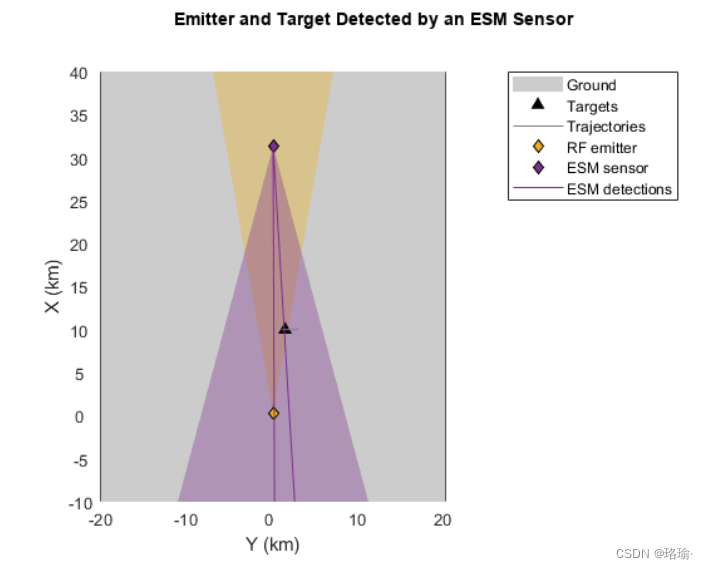
上图显示了从发射器和目标检测到的发射,因为目标从发射器接收能量并将该波形重新发射回场景中,从而导致ESM传感器也检测到该波形。
四、单基地雷达的无源检测
基地雷达也会向场景中发射波形。有时需要对这些排放进行被动检测。为此,必须分别对雷达的发射部分和传感部分进行建模。发射器生成的波形成为场景射频发射的一部分。然后,这些波形可以被其他传感器(例如ESM传感器)检测到。
重用以前的相同方案。对于此方案,将单基地雷达连接到方案顶部的平台(第二个平台),并将ESM传感器连接到方案底部的平台(第一个平台)。中间平台仍然是一个目标,没有连接发射器或传感器。
通过对传感器的发射和传感部分进行建模来创建单基地雷达。用于对单基地雷达发射器进行建模。对于此方案,请使用 1 表示此雷达使用的波形类型。波形类型是用户定义的枚举,用于表示方案中模拟的不同类型的波形。波形枚举使发射器和传感器知道如何处理这些波形以生成检测结果。例如,如果发射器的波形类型为1,并且传感器将其包含在波形列表中,则传感器知道如何处理发射器的发射(例如,使用匹配的滤波器)并实现与该波形相关的处理增益。
用于对场景中接收RF发射的雷达的传感部分进行建模,识别与单基地发射器波形类型相对应的发射,并从这些接收发射中生成检测。与发射器波形类型不匹配的发射被视为干扰。
当用于对单基地雷达的传感部分进行建模时,请将传感器的属性设置为。这告诉传感器在处理接收到的RF发射时使用发射器的配置。还必须将属性设置为 true 才能启用对对象的检测。
将雷达发射器和传感器连接到第二个平台。重复使用以前的ESM传感器,但将ESM传感器的已知波形类型列表设置为包括雷达发射的波形。如果ESM传感器不知道雷达的波形类型,则不会检测到它。更新显示以同时显示单站检测和 ESM 检测。
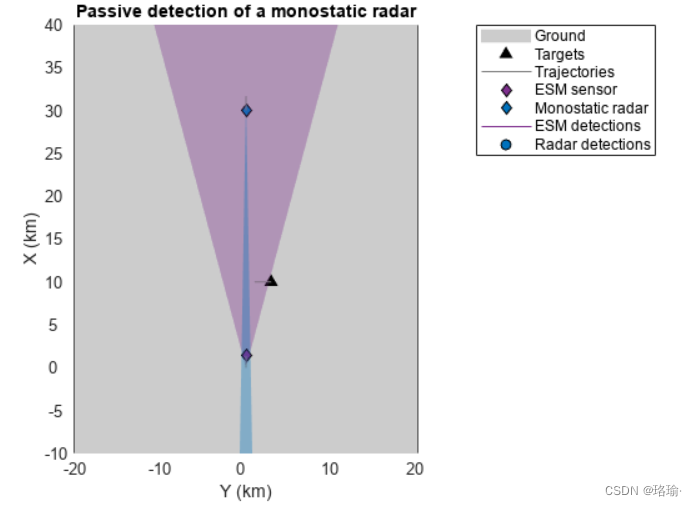
上图显示了雷达扫描其平台前方位角扇区,其中包括目标平台以及携带ESM传感器的平台。当雷达的视野(以蓝色显示)扫过它们的位置时,雷达会为这两个平台生成检测。但是,当雷达的波束经过ESM传感器的位置时,ESM传感器会检测到雷达,并通过绘制源自传感器的线来指示估计的位置。
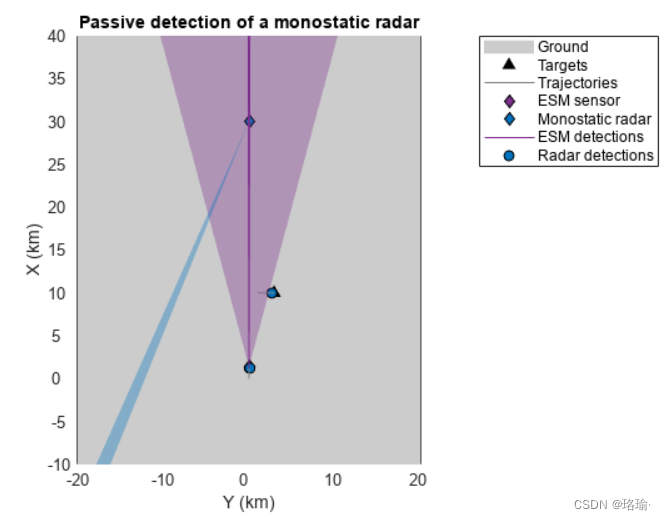
使用和建模的单基地雷达的检测结果显示为目标和配备ESM传感器的平台附近的填充蓝色圆圈。ESM传感器还能够检测雷达,如仅角度检测所示,显示为源自ESM传感器并经过雷达平台附近的线。
由于雷达发射的高功率(EIRP),发射的能量从目标反射到ESM平台。因此,当雷达发射器的视场扫过目标平台时,ESM传感器会检测到目标平台,而目标仍在ESM传感器的视场内。
五、程序
使用Matlab,点击打开。
打开下面的“SimulatingPassive...Example.mlx”文件,点击运行,就可以看到上述效果。

电子战内容:
电子战的基本内容由:电子支援措施(ESM)、电子对抗措施(ECM)和电子反对抗措施(ECCM)三大部分构成。
所谓“电子支援措施”(ESM),是指利用电子侦察手段,获取军事情报,用于提供电子信息。其中心任务是对敌方电磁信息进行搜索、侦收、标定,并迅速分析其性质,为己方实施对抗措施和电子反对抗措施提供依据。因此,电子侦察是电子支援措施的主要环节,也是整个电子战的基本先决条件。
电子侦察又分为技术侦察和情报侦察。顾名思义,技术侦察就是要设法获取敌方电子设备的技术性能,例如:工作体制、频率、脉冲宽度、重复频率和发射/接收功率等。掌握了这些技术数据,就可采取相应措施,实施电子战斗。而情报侦察则是要设法弄清敌方电子设备的种类、数量、配置、密度和部署调动情况,从中获得敌方指挥机关位置、武器配置、部队编成和作战意图等。当然,现代条件下的情报侦察主要靠各种电子侦察设备来实施,包括各种机载、车载、舰载、星载和便携、投掷式的电子侦察设备。
所谓“电子对抗措施”(ECM),是指利用电子设备手段对敌方电子设备进行干扰和破坏,其基本任务是,依据“电子支援措施”所提供的各种资料,对敌方使用的电磁波进行干扰、消弱或降低敌方电子设备效能,甚至给予彻底摧毁。目前,各国所采取的电子对抗措施,主要是电子干扰、设置假目标和投放电子诱饵,采取隐形技术,以及使用反辐射导弹予以彻底摧毁。也就是所谓“软硬”相结合的一体化电子战手段。
电子干扰手段很多,施放有源干扰和无源干扰,也是常用的行之有效的办法。而使用火力(反辐射导弹)对抗,则是最有效、最彻底的办法。
所谓“电子反对抗措施”(ECCM),是指利用各种电子反侦察、反干扰和反摧毁等措施,保障己方电子设备在敌方电子对抗和反辐射导弹攻击条件下,仍能正常工作的各种方法和手段。反对抗的措施很多,但基本上分为技术措施和组织措施。技术措施就包括提高己方电子设备反对抗能力,从设备和系统的结构原理、信号收发和处理方法,以及抗干扰电路等,其中,快速变频、多频调制、天线极化、信号加密等尤为有效。组织措施主要包括规定收发时间和地域、多频雷达和电台交错使用,多部雷达轮流开机、尽快关机等。
进入80年代以后,高技术高速发展,在电子战领域里,出现了更多更新颖的手段,如“对抗C3”(C3CM)、“敌防空网对抗”(SEAD)、“电子光学支援措施”(EOSM)、电子光学对抗措施(EOCM)和“电子光学反对抗措施”(EOCCM)等。这些都是属于更高级的、更全面的电子战范畴的手段,并已开始实战应用。
此外,还有最新的电子战技术,包括使用“电磁频谱领域扩大”,如毫米波雷达,“主动式消耗干扰发射机”,以及微波、红外、激光等诱骗寻的等。
尽管现代电子设备的发展日新月异,武器装备应用电子设备的比率日益提高,电子斗争手段日益繁多,但从总体方面归纳起来划分电子战的基本内容,不外六大部类,即:电子侦察(亦称电子支援)、电子干扰(含反干扰)、电子欺骗、电子制导、电子控制和电子硬摧毁。当然,在实战中,交战双方的电子武器是相互制约、交叉运用的。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号