

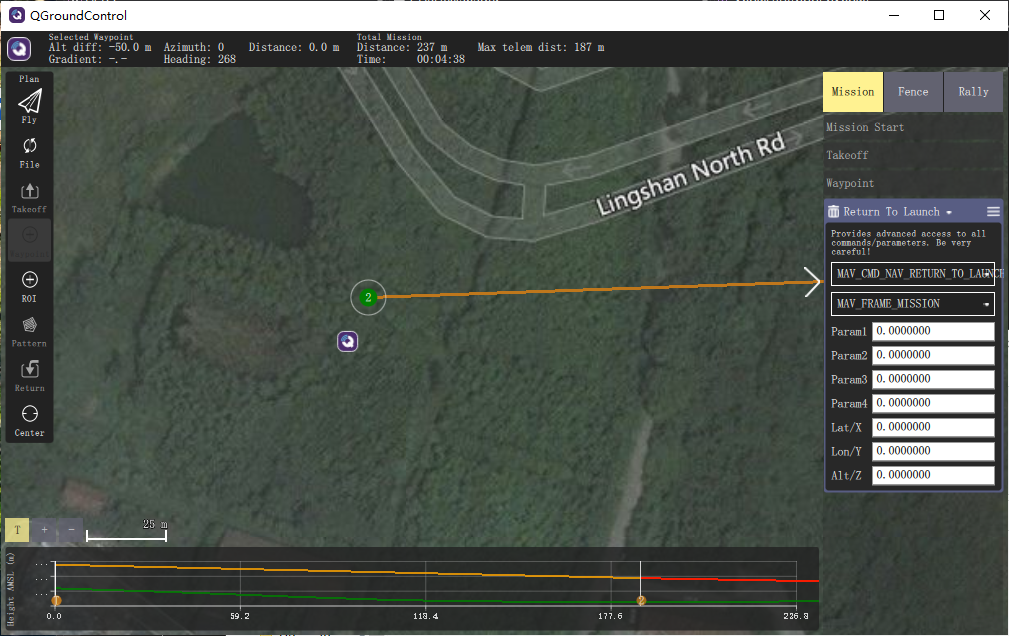
[原][QGC]QGroundControl的航路点信息分类
本文由南水之源原创:QGC的航路点信息分类
|
类形 |
指令 |
参数 |
单位/其他参数 |
其他 |
|
Basic 基础指令
|
Waypoint 飞行中间经过的航路点 |
Altitude |
米 |
本文由南水之源原创:链接 |
|
Lat |
度 |
|
||
|
Lon |
度 |
|
||
|
Hold |
秒 |
|
||
|
Camare |
 |
|
||
|
Take off 起飞点 |
Altitude |
米 |
|
|
|
Lat |
度 |
|
||
|
Lon |
度 |
|
||
|
Land 降落点 |
Altitude |
米 |
|
|
|
Lat |
度 |
|
||
|
Lon |
度 |
|
||
|
Precision land 是否要到精确位置 |
 |
不开启 看机会 必须精确 |
||
|
Return To Launch |
|
|
返回起飞点 |
|
|
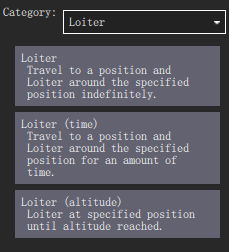
Loiter 游荡指令 |
Loiter 游荡/徘徊 |
Altitude |
米 |
再下一个指定到来之前,无限期地到达指定地点并徘徊 |
|
Lat |
度 |
|||
|
Lon |
度 |
|||
|
Loiter (time) |
Altitude |
米 |
地到达指定地点并徘徊一段时间 |
|
|
Lat |
度 |
|||
|
Lon |
度 |
|||
|
Loiter Time |
秒 |
|||
|
Loiter (altitude) |
Altitude |
米 |
地到达指定地点并徘徊到一定高度 |
|
|
Lat |
度 |
|||
|
Lon |
度 |
|||
|
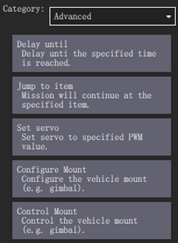
Advanced 进阶指令
|
Delay until 延迟行动,直到一定时间后 |
Hold |
Huor |
|
|
Min |
|
|||
|
Sec |
|
|||
|
Jump to item |
Item |
|
跳到某个指令 |
|
|
Repeat |
|
|||
|
Set servo |
Servo |
系统 |
将伺服系统调节到某个带宽 |
|
|
PWM |
带宽 |
|||
|
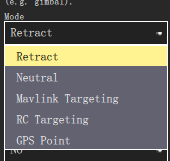
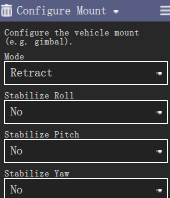
Configure mount 配置机载程序 |
mode |
 |
 |
|
|
Stabilize Roll |
|
|||
|
Stabilize Pitch |
|
|||
|
Stabilize Yaw |
|
|||
|
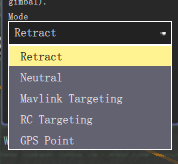
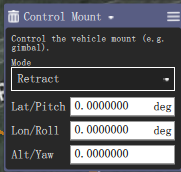
Control Mount 控制座 |
Mode |
 |
|
|
|
姿态 |
 |
|
||
|
Conditionals 等待条件允许
|
Wait for yaw |
Direction |
 |
|
|
offeset |
 |
|||
|
Heading |
Deg |
|||
|
Rate |
Degrees/s |
|||
|
Flight control 飞控
|
Change speed 改变速度 |
Type |
 |
空速 相对地面速度 |
|
Speed |
m/s |
|
||
|
Throttle |
% |
油门 |
||
|
Land start |
|
|
着陆航点开始标记 |
|
|
Camera 相机相关操作
|
Region of interest(ROI) 识别区域 |
Altitude |
米 |
 |
|
ROI to next waypoint |
Pitch offset |
Deg |
 |
|
|
Roll offset |
Deg |
|||
|
Yaw offset |
Deg |
|||
|
Cancel ROI |
|
|
|
|
|
Camera control |
Session |
|
相机参数 |
|
|
Zoom |
|
|||
|
Step |
|
|||
|
Focus lock |
|
|||
|
Command |
|
|||
|
Id |
|
|||
|
Camera trigger distance 每隔多远/多久拍摄 |
Trigger |
 |
|
|
|
Distance |
米 |
|
||
|
Shutter |
毫秒 |
|
||
|
Set camera modes |
|
 |
|
|
|
Start image capture |
Interval |
秒 |
 |
|
|
Photo count |
|
|||
|
Stop image capture |
|
|
|
|
|
Start video capture |
|
|
|
|
|
Stop video capture |
|
|
|

发布时间20210305,初次学习,有问题欢迎在下方留言指正。
