
20145215 《信息安全系统设计基础》实验四 外设驱动程序设计
20145215 《信息安全系统设计基础》实验四 外设驱动程序设计
实验步骤
阅读和理解源代码
功能
- demo_read,demo_write 函数完成驱动的读写接口功能,do_write 函数实现将用户写入的数据逆序排列,通过读取函数读取转换后的数据。这里只是演示接口的实现过程和内核驱动对用户的数据的处理。
源代码框架
#define DEVICE_NAME "demo"
static ssize_t demo_write(struct file *filp,const char * buffer, size_t count)
{
char drv_buf[];
copy_from_user(drv_buf , buffer, count);
…
}
static ssize_t demo_read(struct file *filp,char *buffer,size_t count,loff_t *ppos)
{
char drv_buf[];
copy_to_user(buffer, drv_buf,count);
….
}
static int demo_ioctl(struct inode *inode, struct file *file,unsigned int cmd, unsigned long arg)
{
}
static int demo_open(struct inode *inode, struct file *file)
{
}
static int demo_release(struct inode *inode, struct file *filp)
{
MOD_DEC_USE_COUNT;
DPRINTK("device release\n");
return 0;
}
static struct file_operations demo_fops = {
owner: THIS_MODULE,
write:demo_write,
read: demo_read,
ioctl: demo_ioctl,
open: demo_open,
release:demo_release,
};
#ifdef CONFIG_DEVFS_FS
static devfs_handle_t devfs_demo_dir, devfs_demoraw;
#endif
static int __init demo_init(void)
{
int result;
#ifdef CONFIG_DEVFS_FS
devfs_demo_dir = devfs_mk_dir(NULL, "demo", NULL);
devfs_demoraw = devfs_register(devfs_demo_dir, "0", DEVFS_FL_DEFAULT,
demo_Major, demo_MINOR, S_IFCHR | S_IRUSR | S_IWUSR,&demo_fops, NULL);
#else
SET_MODULE_OWNER(&demo_fops);
result = register_chrdev(demo_Major, "scullc", &demo_fops);
if (result < 0) return result;
if (demo_Major == 0) demo_Major = result; /* dynamic */
#endif
printk(DEVICE_NAME " initialized\n");
return 0;
}
static void __exit demo_exit(void)
{
unregister_chrdev(demo_major, "demo");
kfree(demo_devices);
printk(DEVICE_NAME " unloaded\n");
}
module_init(demo_init);
module_exit(demo_exit);
注释
将驱动映射为标准接口
- static struct file_operations demo_fops = {…}完成了将驱动函数映射为标准接口。
驱动向内核注册
- devfs_registe()和 register_chrdev()函数完成将驱动向内核注册。
Open方法
- Open方法提供给驱动程序初始化设备的能力,从而为以后的设备操作做好准备,此外open操作一般还会递增使用计数,用以防止文件关闭前模块被卸载出内核。
- 递增使用计数
- 检查特定设备错误。
- 如果设备是首次打开,则对其进行初始化。
- 识别次设备号,如有必要修改 f_op 指针。
- 分配并填写 filp->private_data 中的数据。
Release 方法
- 与open方法相反,release 方法应完成如下功能:
- 释放由 open 分配的 filp->private_data 中的所有内容
- 在最后一次关闭操作时关闭设备
- 使用计数减一
Read和Write方法
ssize_t demo_write(struct file *filp,const char * buffer, size_t count,loff_t *ppos)
ssize_t demo_read(struct file *filp, char *buffer, size_t count, loff_t *ppos)
- read 方法完成将数据从内核拷贝到应用程序空间,write 方法相反,将数据从应用程序空间拷贝到内核。对于者两个方法,参数 filp 是文件指针,count 是请求传输数据的长度,buffer 是用户空间的数据缓冲区,ppos 是文件中进行操作的偏移量,类型为 64 位数。
- 由于用户空间和内核空间的内存映射方式完全不同,所以不能使用象 memcpy 之类的函数,必须使用如下函数:
unsigned long copy_to_user (void *to,const void *from,unsigned long count);
unsigned long copy_from_user(void *to,const void *from,unsigned long count);
ioctl方法
- ioctl 方法主要用于对设备进行读写之外的其他控制,比如配置设备、进入或退出某种
操作模式,这些操作一般都无法通过 read/write 文件操作来完成。
编译驱动模块及测试程序
-
在 Makefile 中有两种编译方法,可以在本机上使用gcc 也可以使用交叉编译器进行编译,我们组采用交叉编译器进行编译。如下图:
-
注意:如果编译的时候出现问题,可能是在/usr/src 下没有建立一个linux 连接,可以使用下面的命令:
[root@zxt 01_demo]# cd /usr/src/
[root@zxt src]# ln –sf linux-2.4.20-8 linux
[root@zxt src]# ls
debug linux linux-2.4 linux-2.4.20-8 redhat
测试驱动程序
- 如果使用 gcc 编译的话,需要通过下面的命令来建立设备节点,如果使用交叉编译器的话,不需要建立设备节点。
#mknod /dev/demo c 254 0
-
首先要插入驱动模块demo.o,然后可以用lsmod 命令来查看模块是否已经被插入,在不使用该模块的时候还可以用rmmod 命令来将模块卸载。
-
我们使用交叉编译器,不需要建立设备节点,下图为步骤成功的结果:
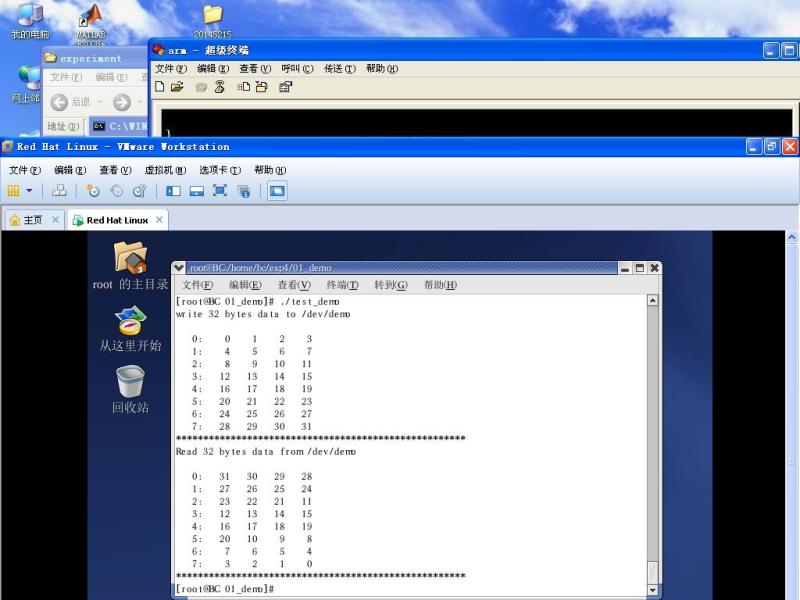
-
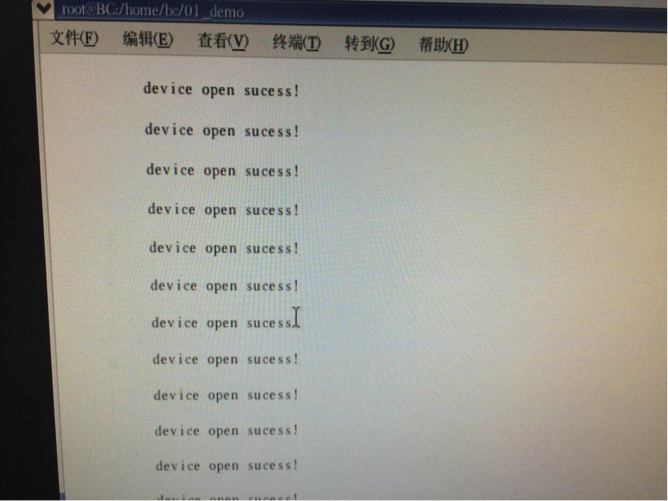
驱动模块成功插入后,在/dev下面建立一个demo的审文件,使用cat来直接调用read函数,测试读过程:
如果模块没有成功插入的话,会出现下面的情况:
[root@zxt 01_demo]# ./test_demo
####DEMO device open fail####
- 在驱动模块成功插入后,会在/dev 下面建立一个叫做demo 的设备文件,我们也可以使用cat 命令来直接调用read 函数,来测试读过程:
[root@zxt demo]# cat /dev/demo/0
device open success!
遇到的问题及解决过程
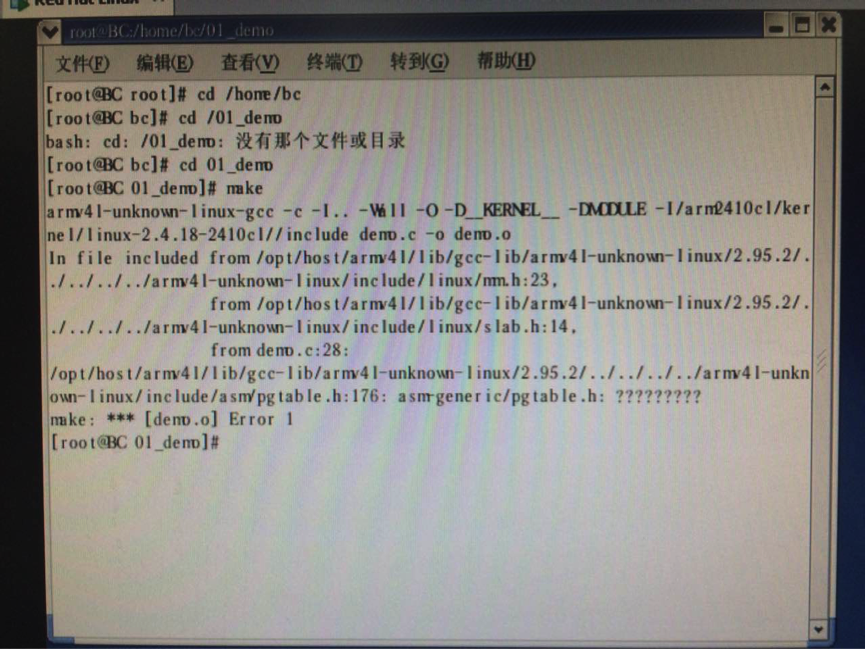
- 当我们使用编译器进行makefile的时候,出现了Error,一开始以为是/usr/src下没有建立linux连接,所以使用了命令:
cd /usr/src/
ln –sf linux-2.4.20-8 linux
ls
- 但是依旧没有解决问题,后面发现是makefile有问题,对makefile进行修改,makefile中两行宏变量定义用于使用armv4l-unknown-linux-gcc编译器编译驱动:
#KERNELDIR = /arm2410cl/ kernel/linux-2.4.18-2410cl/
#CROSS_COMPILE= armv4l-unknown-linux-
- 由于makefile文件中KERNEL_PATH设置和真实环境有点不同,修改makefile文件中的路径就好了,修改后:
KERNELDIR = /usr/src/linux
#KERNELDIR = /arm2410cl/ kernel/linux-2.4.18-2410cl/
INCLUDEDIR = $(KERNELDIR)/include
#CROSS_COMPILE=armv41-unknown-linux-
心得体会
通过这次实验,我们觉得应该更注重于对代码的理解,以及实验遇到问题时的解决。Makefile的路径修改成功,在开心的同时,也让我们深深感到了自己对理论知识的掌握还不够,makefile学得还不够精,遇到问题的时候要学会一个个地寻找问题,如果不是这个问题,就排除它,寻找下一个问题原因的可能性。由于多番尝试,最终的成功解决,不仅能使我们尝到成功的喜悦,还能使我们对问题理解和记忆地更加深刻,今后再次遇到此类问题也就不用再担心。同时还帮助同学们解决了这个问题,加深了团队合作的意识。

