PYTORCH基本功-ResNet
PYTORCH基本功-ResNet
一、结构
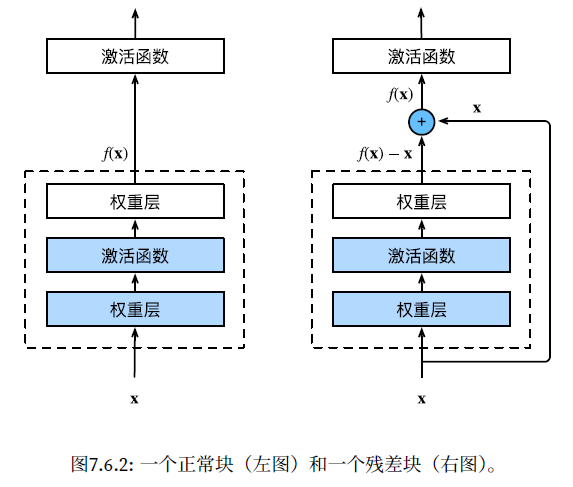
二、原理
为什么计算差值会比计算fx更容易优化
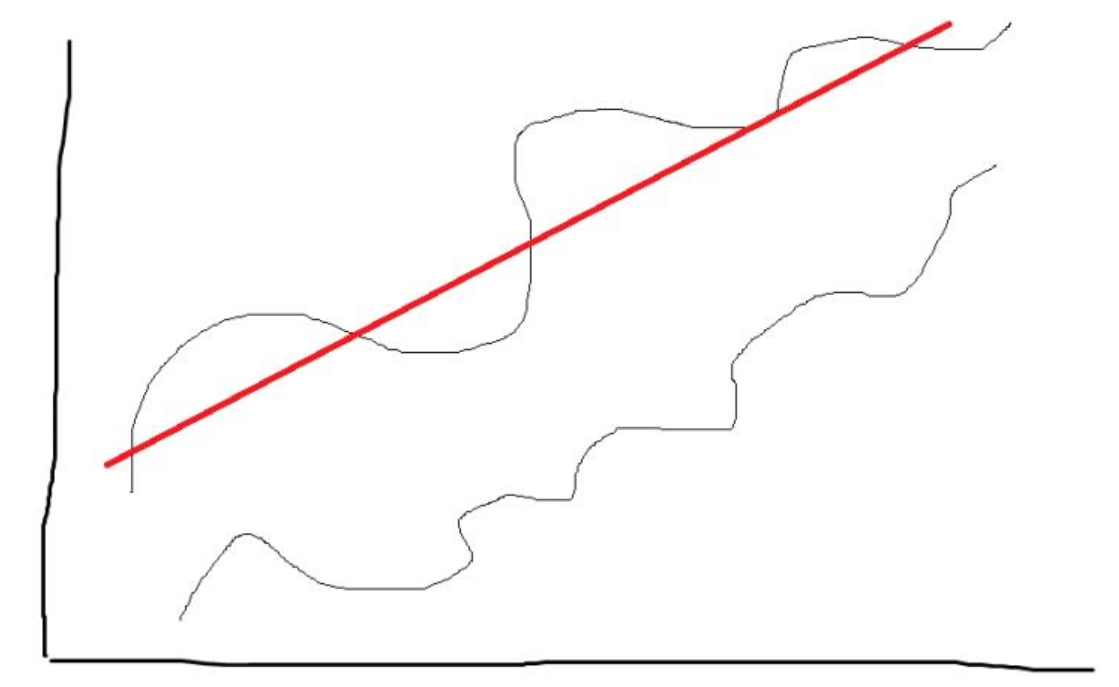
极端的例子是 真实的目标函数就是红线,训练集是上方的曲线,减去红线变为下方的 曲线。
1 训练可以减少资源
2 减法后的残差,量级减少,模型更可以专注 局部或者外轮廓的变化,会拟合得更好。
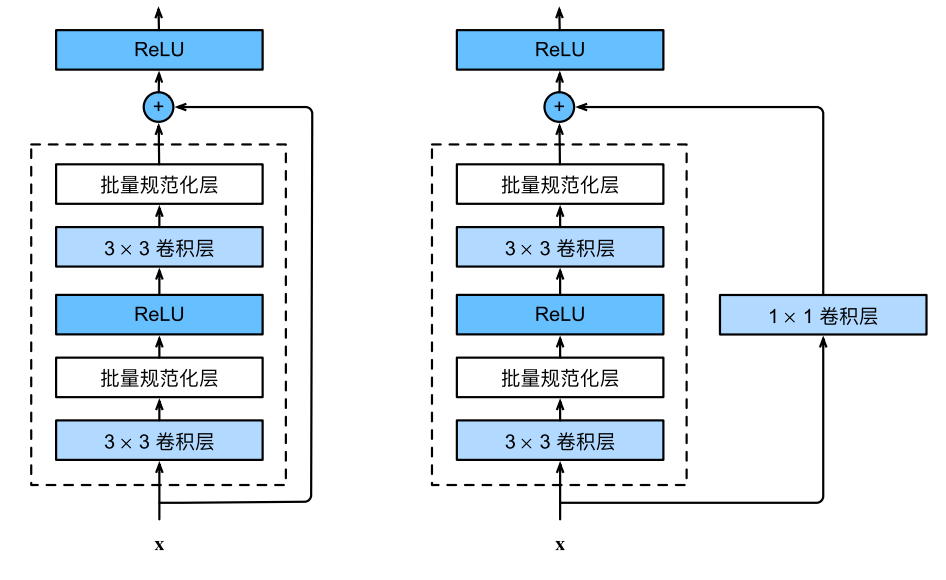
技巧:如果需要改变这个块的输出尺寸,需要添加一个conv1x1的卷积
import torch
import torchvision
import numpy as np
from torch import nn
from torch.nn import functional as F
class Resduial(nn.Module):
def __init__(self,input_channels, num_channels, use_conv1x1, stride):
super(Resduial, self).__init__()
self.conv1 = nn.Conv2d(in_channels=input_channels, out_channels=num_channels, kernel_size=3,padding=1, stride=stride)
self.conv2 = nn.Conv2d(in_channels=num_channels, out_channels=num_channels,kernel_size=3, padding=1, stride=stride)
self.bn1 = nn.BatchNorm2d(num_channels)
self.bn2 = nn.BatchNorm2d(num_channels)
if use_conv1x1:
self.conv1x1 = nn.Conv2d(in_channels=input_channels, out_channels=num_channels,kernel_size=1,stride=stride)
else:
self.conv1x1 = None
pass
def forward(self, x):
import pdb; pdb.set_trace()
#1
y = self.conv1(x)
y = self.bn1(y)
y = F.relu(y)
#2
y = self.conv2(y)
y = self.bn2(y)
if self.conv1x1:
x = self.conv1x1(x)
y = y + x
y = F.relu(y)
return y
x = torch.rand(4,3,6,6)
resd = Resduial(3,3,use_conv1x1=True, stride=1)
y = resd(x)
print(y.shape)
bottleneck结构代码
参考链接代码:https://blog.csdn.net/hxxjxw/article/details/106582884

 浙公网安备 33010602011771号
浙公网安备 33010602011771号