[炼丹术]YOLOv5目标检测学习总结
Yolov5目标检测训练模型学习总结
一、YOLOv5介绍

YOLOv5是一系列在 COCO 数据集上预训练的对象检测架构和模型,代表Ultralytics 对未来视觉 AI 方法的开源研究,结合了在数千小时的研究和开发中获得的经验教训和最佳实践。
下面是YOLOv5的具体表现:
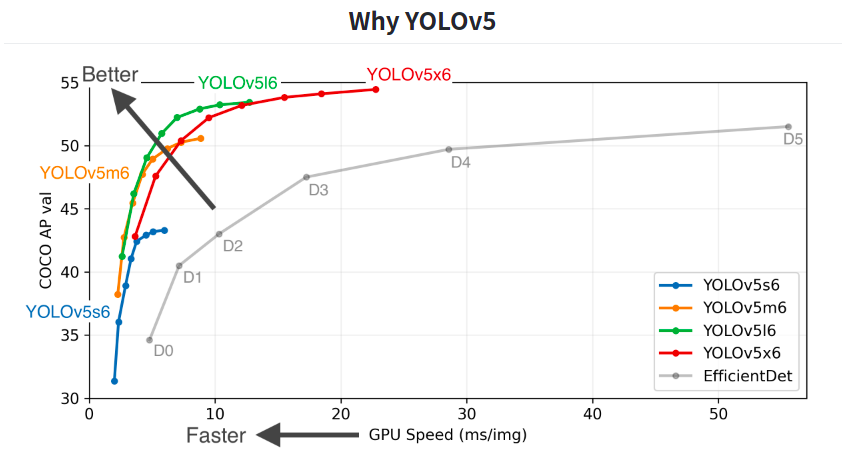
我们可以看到上面图像中,除了灰色折线为EfficientDet模型,剩余的四种都是YOLOv5系列的不同网络模型。
其中5s是最小的网络模型,5x是最大的网络模型,而5m与5l则介于两者之间。
相应地,5s的精度小模型小易于移植,而5x的精度高模型大比较臃肿。
1.1 Pretrained Checkpoints 预检查点
| Model | size(pixels) | $mAP^{val}$0.5:0.95 | \(mAP^{test}\) | $mAP^{val}$0.5 | Speed v100 | params(M) | FLOPs 640(B) |
|---|---|---|---|---|---|---|---|
| [YOLOv5s][assets] | 640 | 36.7 | 36.7 | 55.4 | 2.0 | 7.3 | 17.0 |
| [YOLOv5m][assets] | 640 | 44.5 | 44.5 | 63.1 | 2.7 | 21.4 | 51.3 |
| [YOLOv5l][assets] | 640 | 48.2 | 48.2 | 66.9 | 3.8 | 47.0 | 115.4 |
| [YOLOv5x][assets] | 640 | 50.4 | 50.4 | 68.8 | 6.1 | 87.7 | 218.8 |
| [YOLOv5s6][assets] | 1280 | 43.3 | 43.3 | 61.9 | 4.3 | 12.7 | 17.4 |
| [YOLOv5m6][assets] | 1280 | 50.5 | 50.5 | 68.7 | 8.4 | 35.9 | 52.4 |
| [YOLOv5l6][assets] | 1280 | 53.4 | 53.4 | 71.1 | 12.3 | 77.2 | 117.7 |
| [YOLOv5x6][assets] | 1280 | 54.4 | 54.4 | 72.0 | 22.4 | 141.8 | 222.9 |
| [YOLOv5x6][assets] TTA | 1280 | 55.0 | 55.0 | 72.0 | 70.8 |
- YOLOv5训练与预测技巧

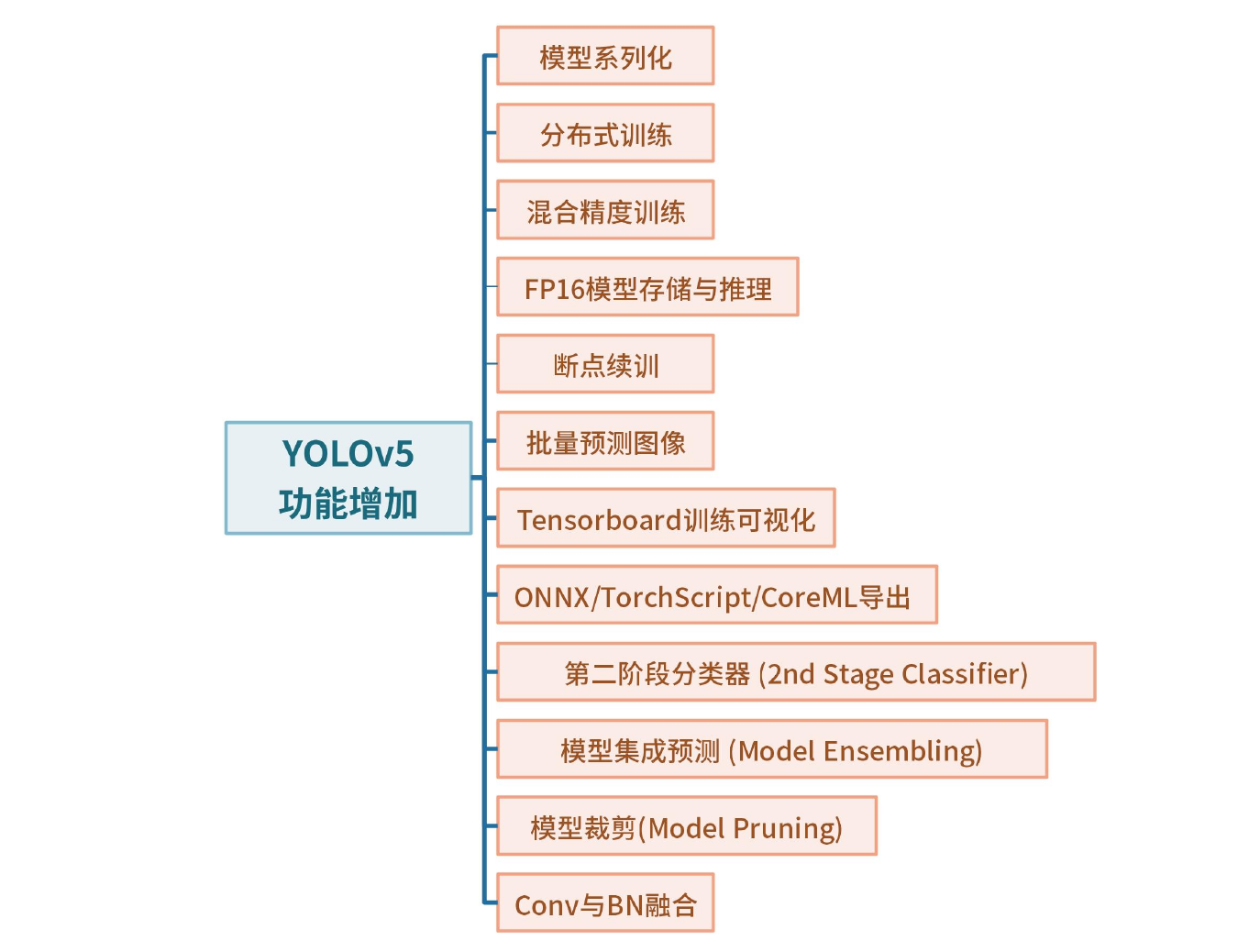
- YOLOv5功能增加
- 课程内容

- YOLOv5网络模型图
二、目标检测相关基础
2.1 目标检测任务理解与总结
2.2 目标检测之常用数据集
2.3 目标检测之性能指标
三、YOLO目标检测系列发展史
3.1 目标检测的里程碑
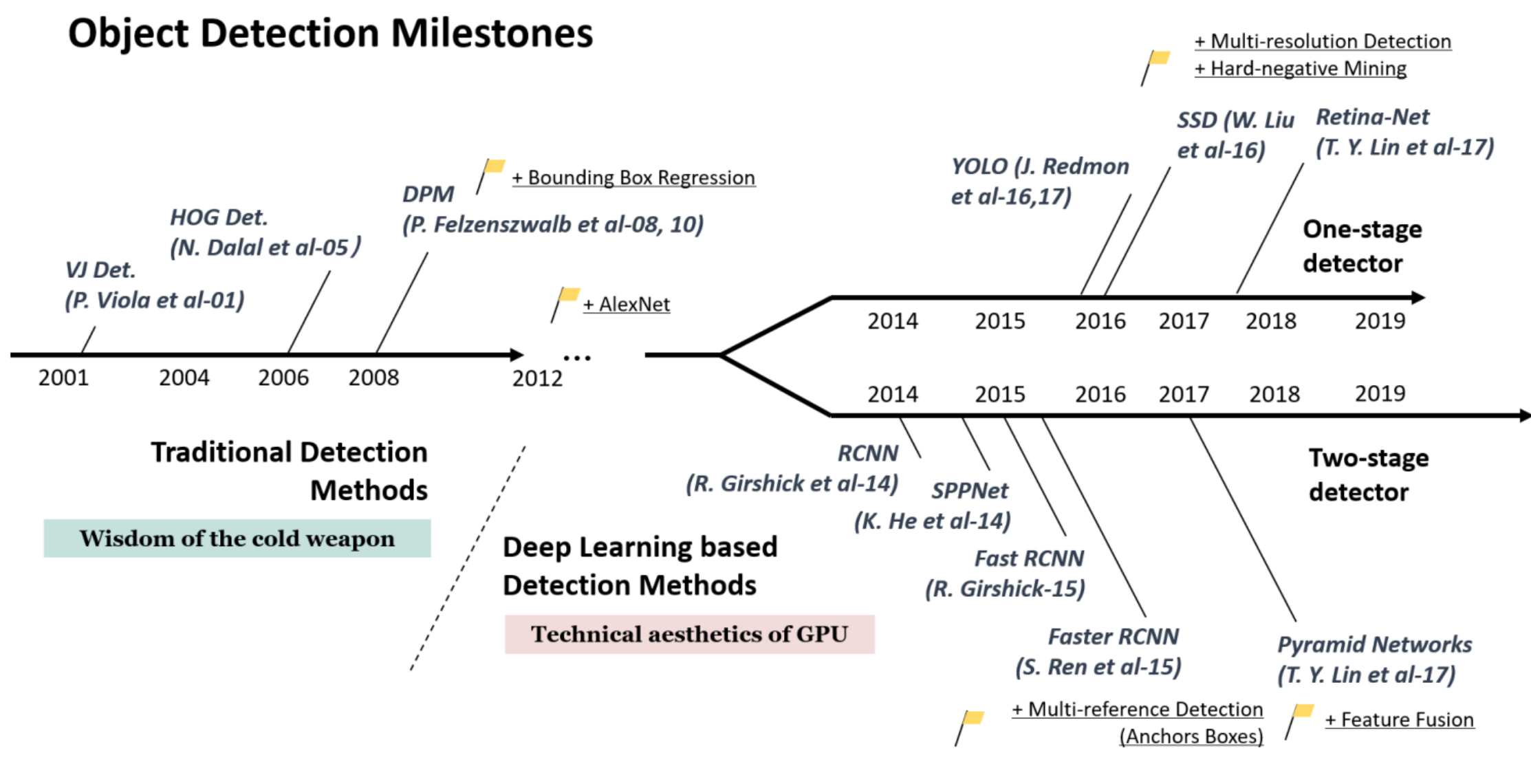
从整个时间轴上我们可以看到,在2012年之前,目标检测的主要算法还是建立在传统视觉方式之上的,AI也不曾像今日这般火热,这里将这段时期称为“冷兵器的时代”。而在2012年之后,就开始了j基于深度学习+卷积网络的方式尝试与探索,这里又根据识别阶段分为两类,一类是以YOLO、SSD等为代表的单阶段检测器,另一类是以Faster RCNN等为代表的双阶段检测器。
从原理上区分,我们又将双阶段检测器归为基于候选框的方法,而将单阶段检测器称为不基于候选框的方法。
如下图:
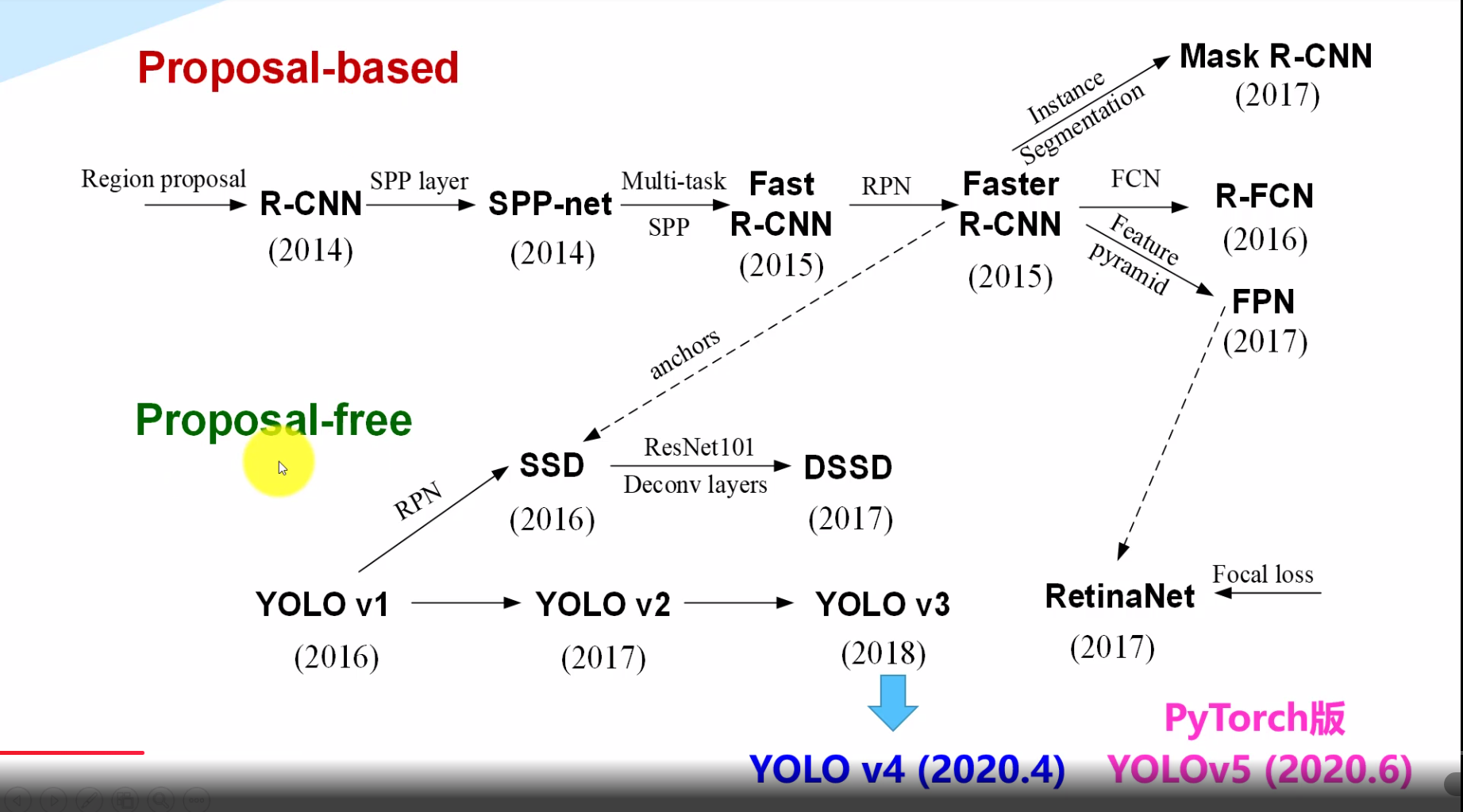
我们可以看到,两种不同方式的检测方法都在*些年得到了不断的发展,并且相互促进和进步。
这里重点关注YOLO系列的发展,最*的版本即为YOLOv4与YOLOv5,两者都是于2020年同期发布,并且较前几个版本效果优化差异明显。
3.2 Darknet简要介绍
追根溯源,YOLO系列均是基于darknet这个框架来进行开发的。
Darknet is an open source neural network framework written in C and CUDA. It is fast, easy to install, and supports CPU and GPU computation.
Darknet是一个用C和CUDA编写的开源神经网络框架。它是快速,易于安装,并支持CPU和GPU计算。
Yolov4 paper:https://arxiv.org/abs/2004.10934
Yolov4 sourcecode:https://github.com/alexeyab/darknet
3.3 YOLO 算法基本思想
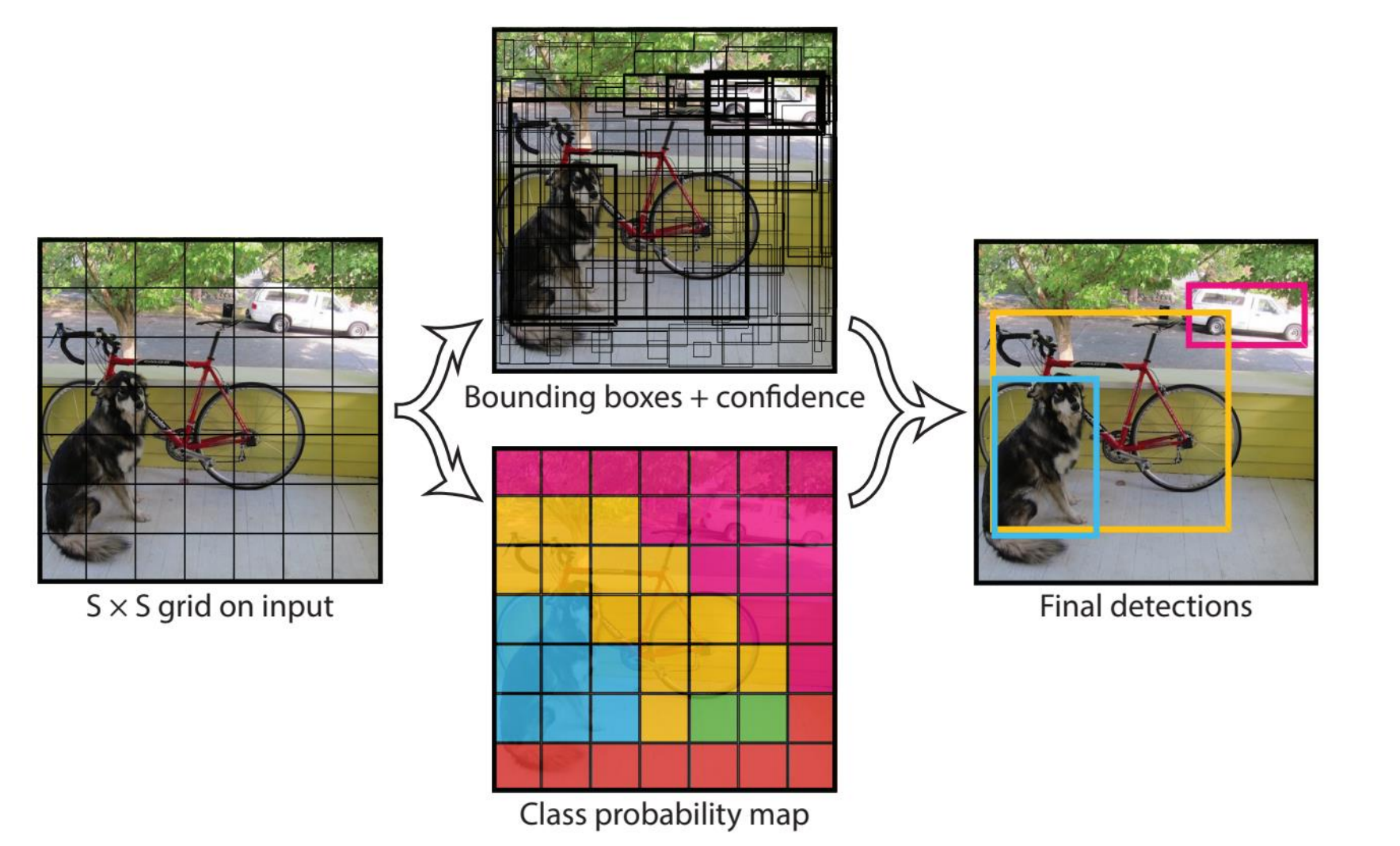
YOLO的基本思想是,将一副图像进行细化的网格划分,在划分的网格基础上进行边界框的预测,同时计算出目标的置信度以及类别的概率图,综合两者来进行最终的检测。
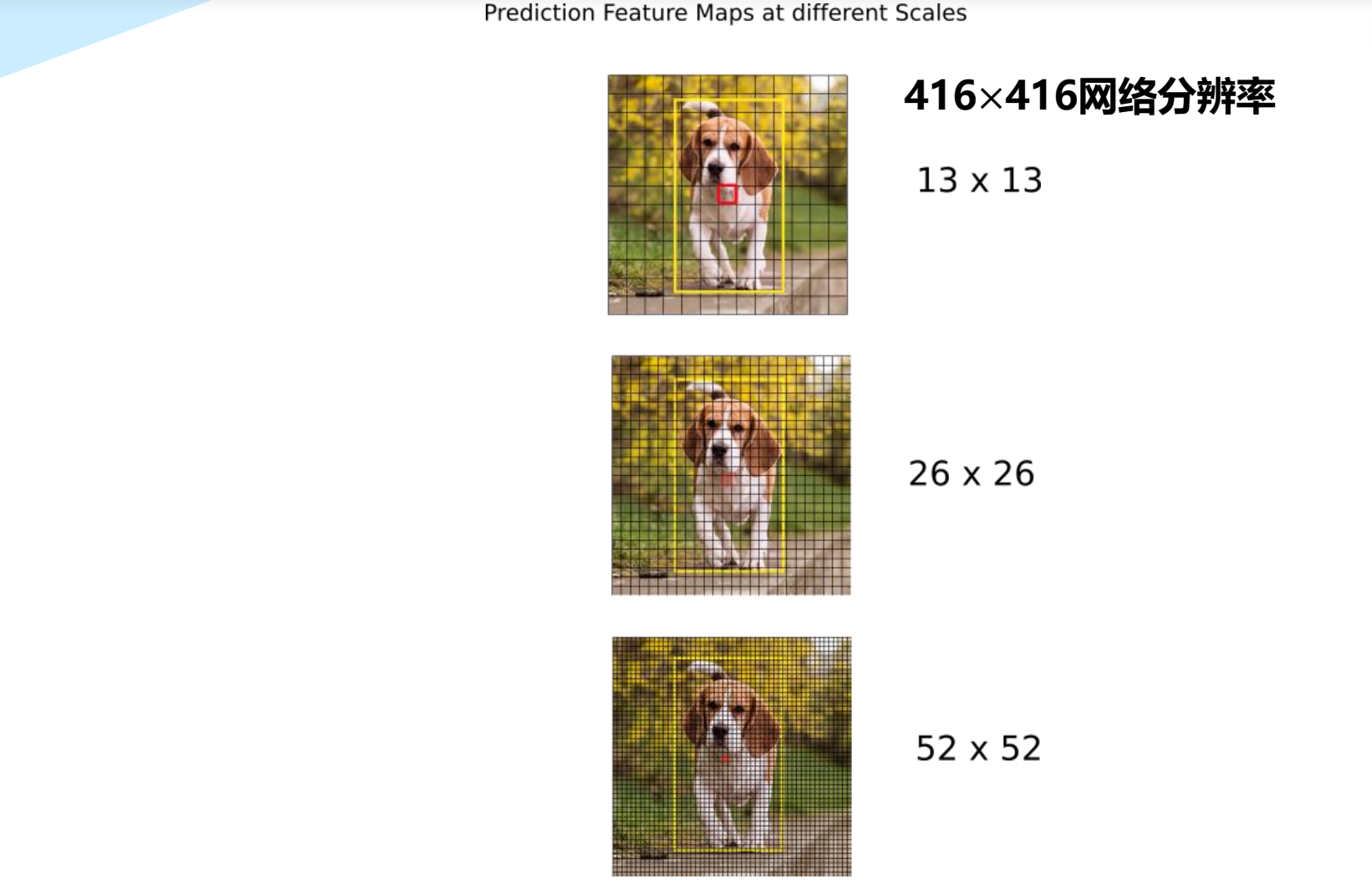
下面接着来看,假设我们要检测的对象还是那只狗,可以看到在黄色边界框中有不断迭代移动的红色网格,这个红色网格就负责处理对象的检测,在迭代过程中,红色网格被预测特征图(Prediction Feature Map)处理,其中这个预测特征图分为三个Box(不同尺度的边界框),可用于计算不同类型的单元——(Box Co-ordinates 边界框坐标信息)、(Objectness Score置信度分数)、(Class Scores分类得分)
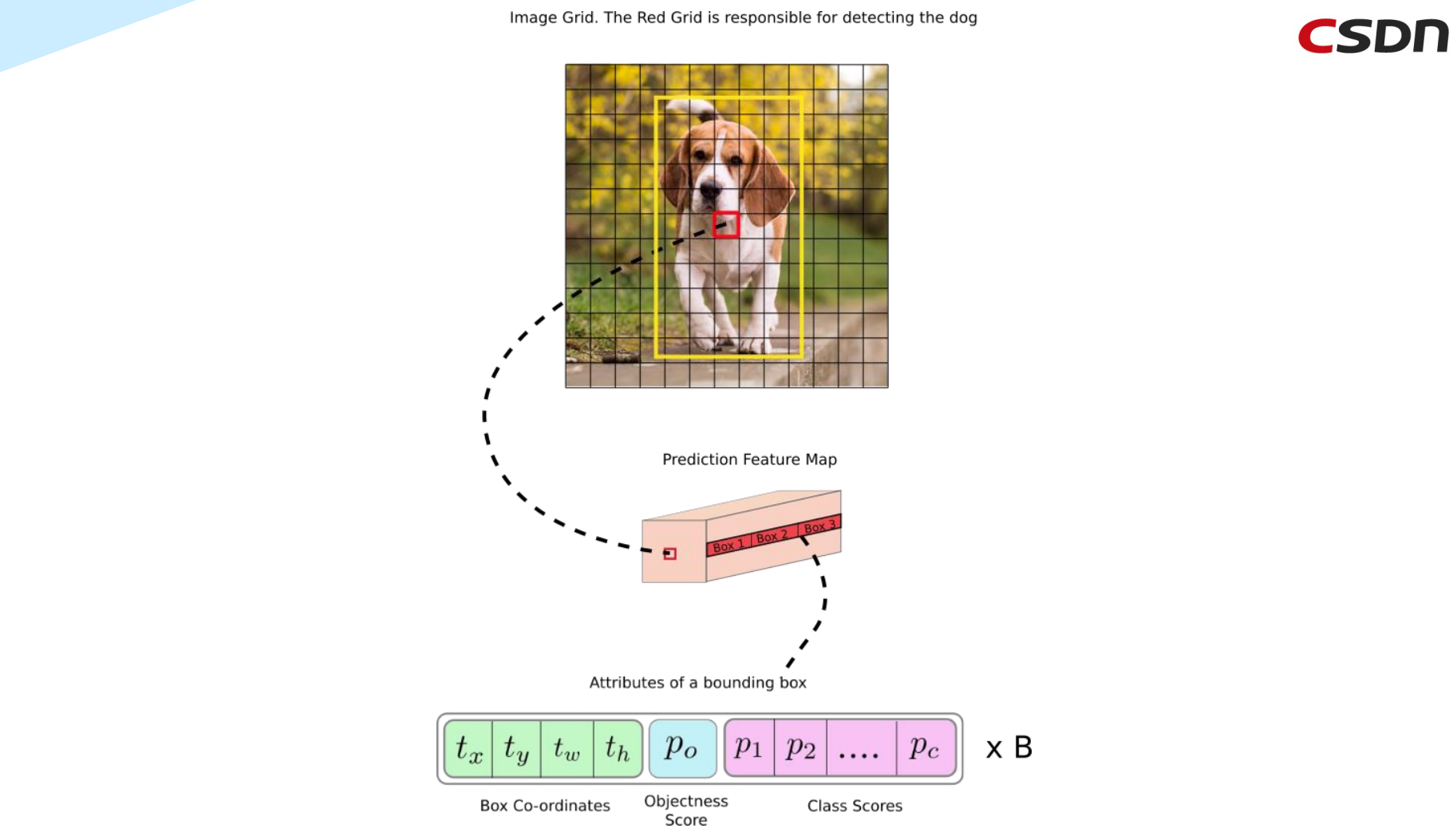
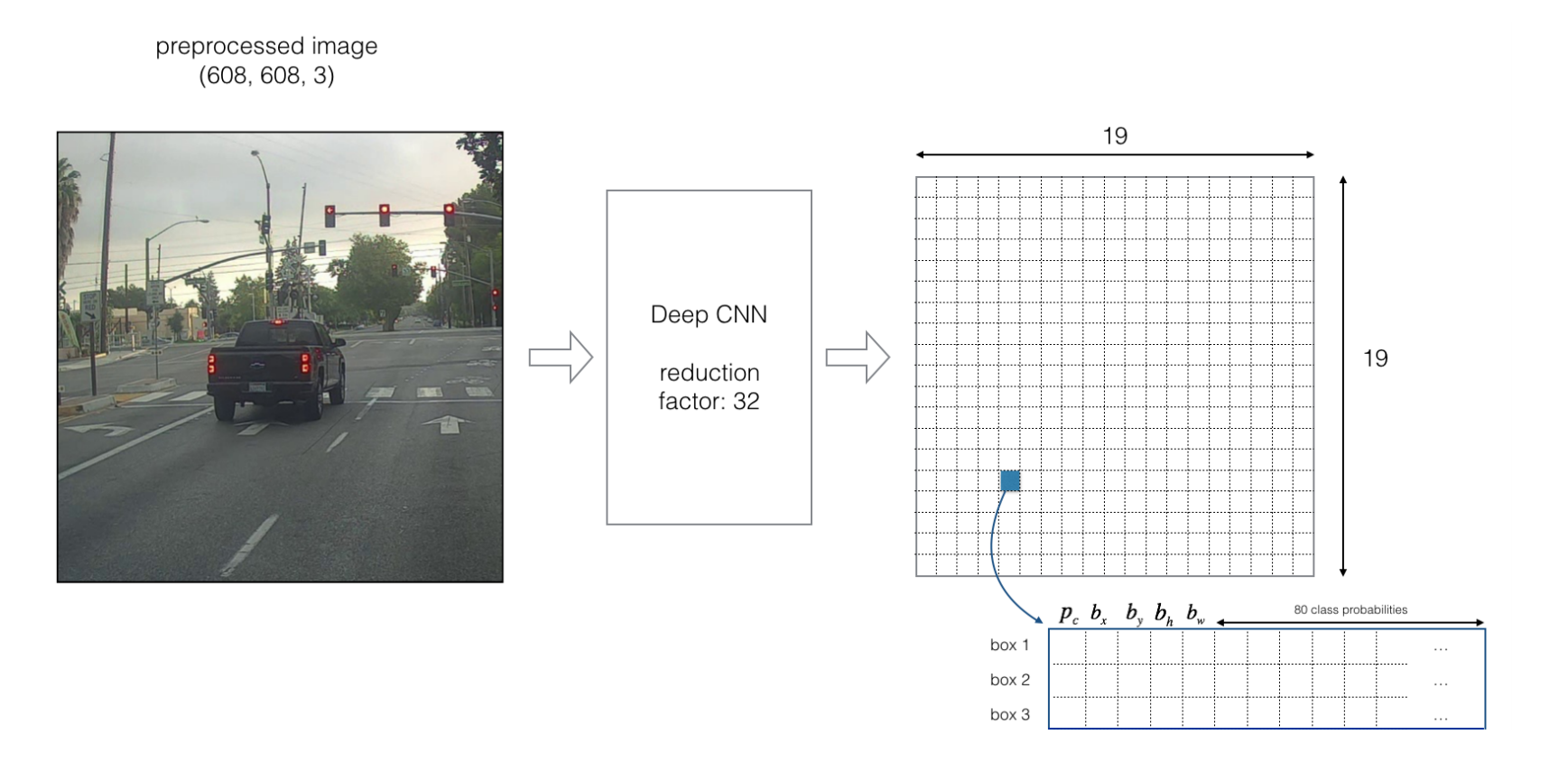
具体地来说,下面再来看一个过程。
假设我们要处理的图像为下图,尺寸大小为(608×608),要检测的对象是图中这辆车,经过YOLO的Deep CNN(DCNN,深度卷积神经网络)之后,会对其进行32倍的下采样,从而可得到一个(19×19)的网格图,对应的每个小格子分别计算出其相应的坐标信息、目标性得分以及每个类别的分类概率,同时,还可以通过Box得到三个不同尺度的边界框的数据。
3.4 YOLO v3/YOLO v4算法的基本思想
- 首先,通过特征提取网络对输入图像提取特征,得到一定大小的特征图,比如19×19(相当于608×608图片大小),然后将输入图像分成19×19个grid cells网格单元,如果GT(Ground Truth标定边界框)中某个目标的中心坐标落在哪一个Grid cell中,那么就由该grid cell来预测该目标。
- 预测得到的输出特征图有两个维度是提取到的特征的维度,比如19×19,还有一个维度(深度)是B×(5+C)。
其中B表示每个grid cell预测的边界框的数量(YOLO v3/v4中是3个,即B=3);
C表示边界框的类别数(没有背景类,所以对于VOC数据集是20);
5表示4个坐标信息和一个目标性得分。
类别预测(Class Prediction)
-
大多数分类器假设输出标签是互斥的。如果输出是互斥的目标类别,则确实如此。因此,YOLO应用softmax函数将得分转换为总和为1的概率。而YOLOv3/v4使用多标签分类。例如,输出标签可以是“行人”和“儿童”,它们不是非排他性的。(现在输出的总和可以大于1)。
-
YOLOv3/v4用多个独立的逻辑(logistic)分类器替换softmax函数,以计算输出属于特定标签的可能性。在计算分类损失时,YOLOv3/v4对每个标签使用二元交叉熵损失。这也避免使用softmax函数而降低了计算复杂度。

3.5 YOLOv3网络架构
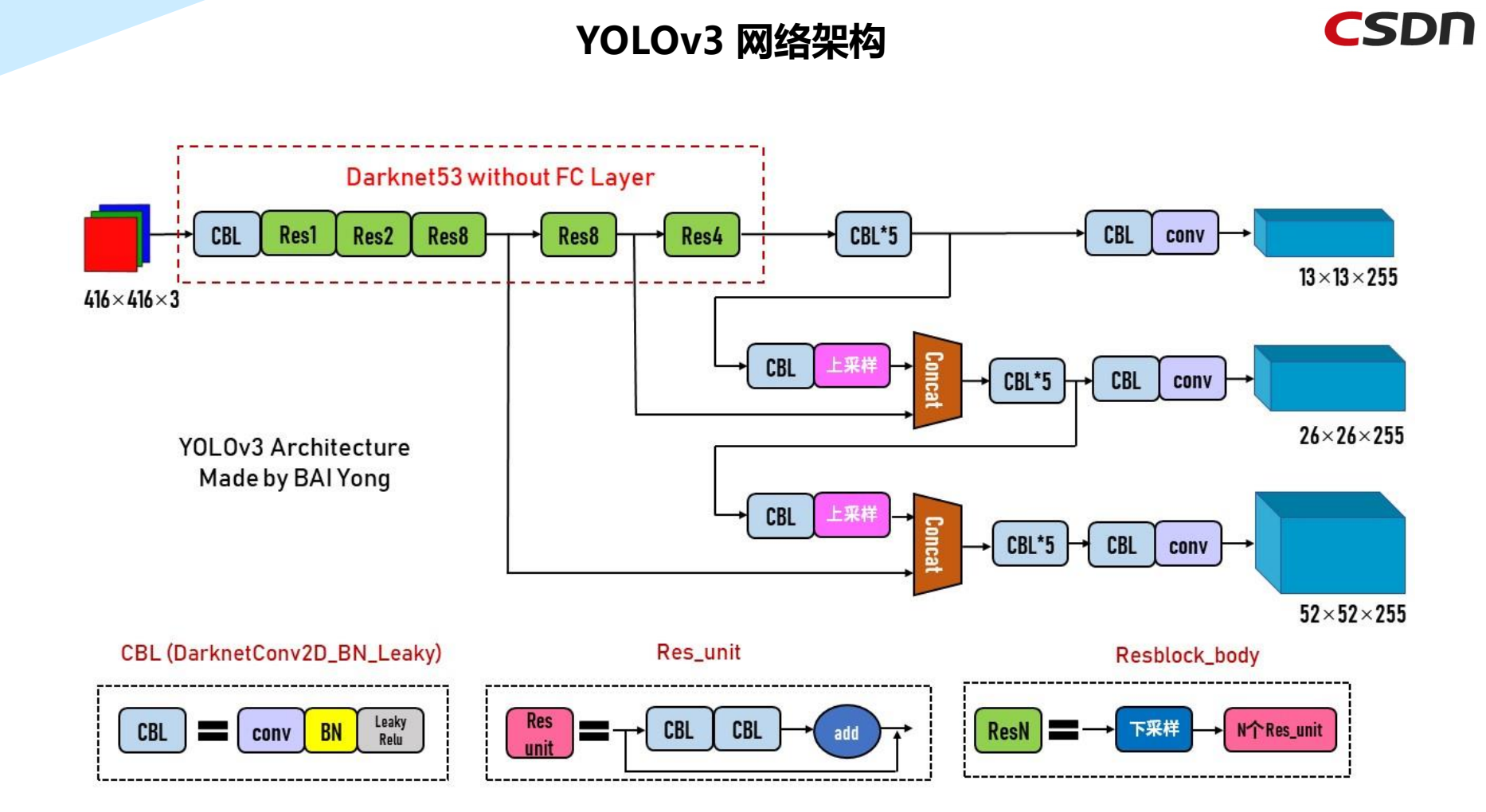
YOLOv3的主干网络是Darknet53,经过采样与卷积等计算,传到头部进行处理。
3.6 YOLOv4网络架构
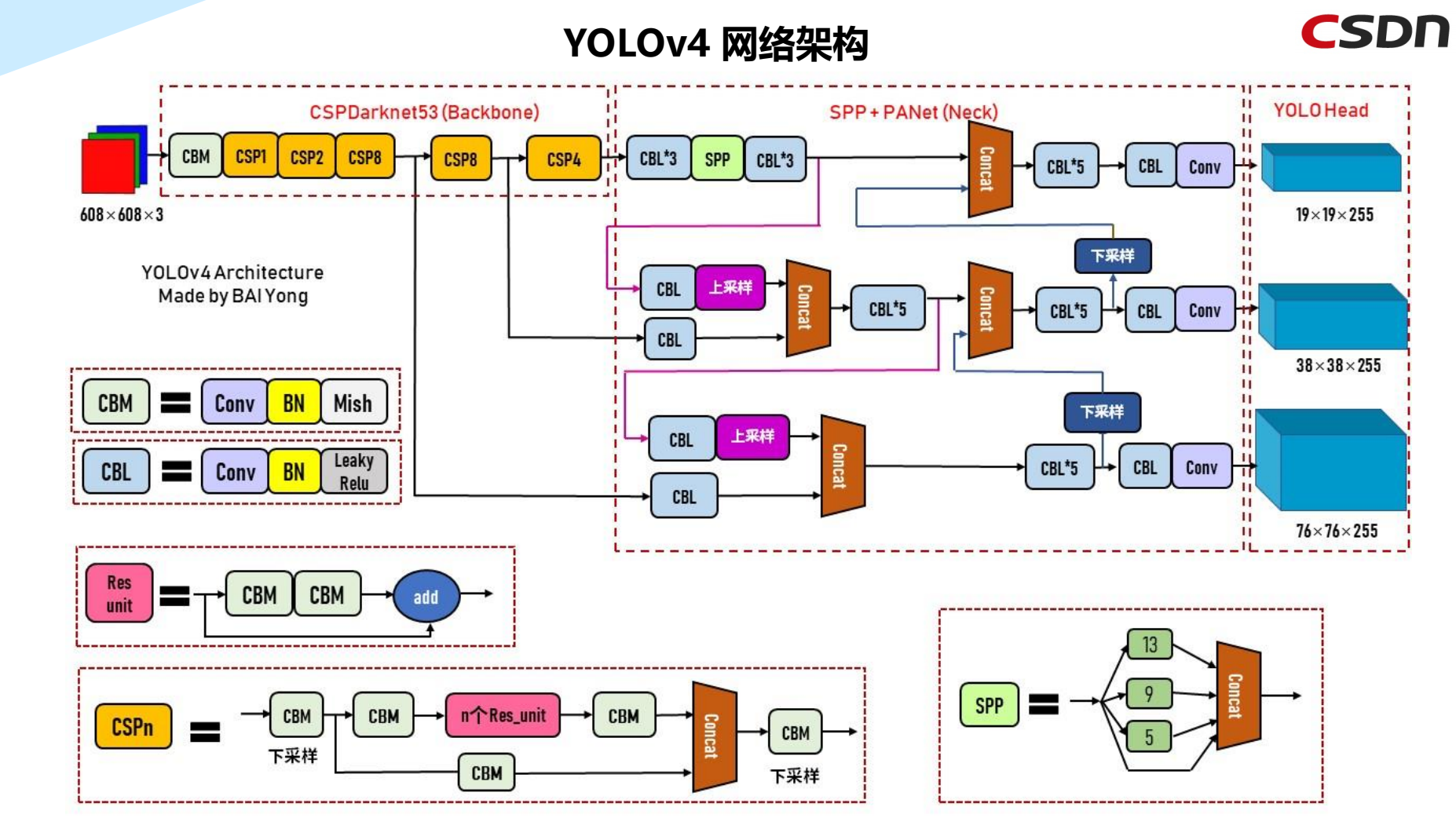
YOLOv4的主干网络是CSP组件+Darknet53,网络传播方式使用SPP+PANet,最终传输到YOLO Head。
四、YOLOv5网络架构及组件及Loss函数
YOLO系列属于单阶段目标探测器,与RCNN不同,它没有单独的区域建议网络(RPN),并且依赖于不同尺度的锚框。
架构可分为三个部分:骨架、颈部和头部。利用CSP(Cross-Stage Partial Networks)作为主干,从输入图像中提取特征。PANet被用作收集特征金字塔的主干,头部是最终的检测层,它使用特征上的锚框来检测对象。
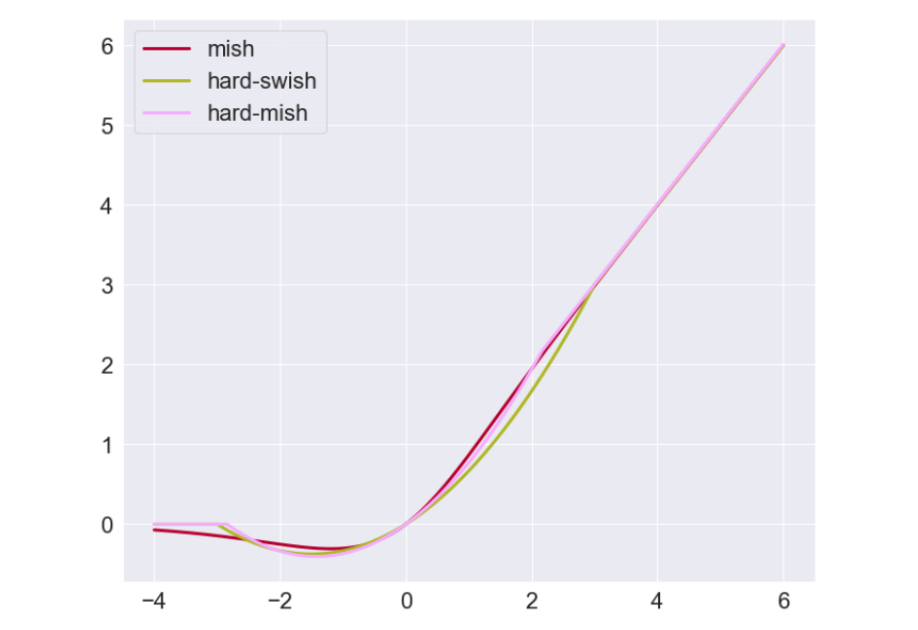
YOLO架构使用的激活函数是Google Brains在2017年提出的Swish的变体,它看起来与ReLU非常相同,但与ReLU不同,它在x=0附*是*滑的。
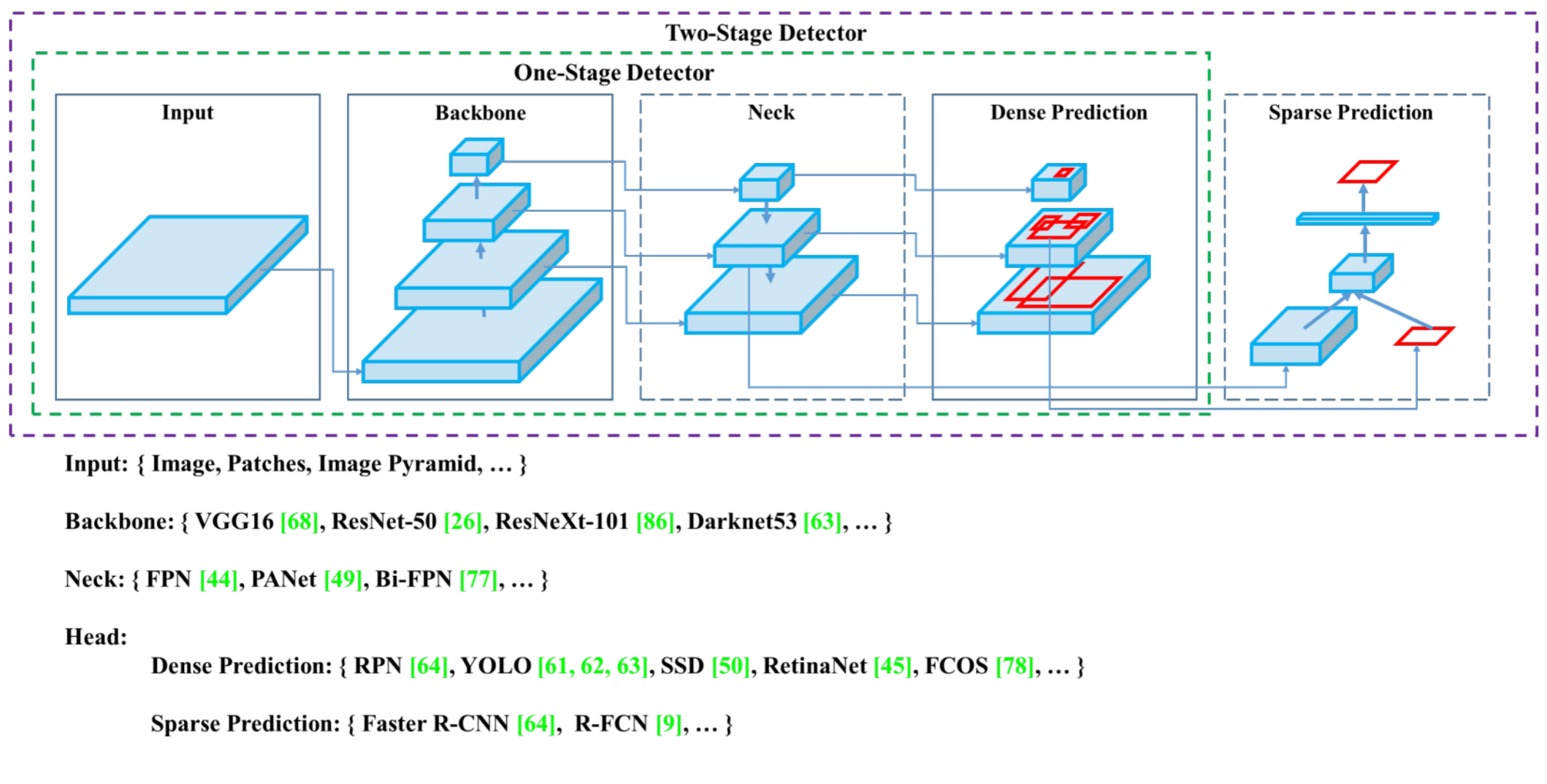
通过上图我们可以看到,
YOLOv5的Backbone骨干网络为{VGG16、ResNet-50、ResNet-101、DarkNet53,...};
颈部网络Backbone为{FPN、PANet、Bi-FPN,...};
头部网络Head为:
Dense Prediction:{RPN、YOLO、SSD、RetinaNet、FCOS、...}
Sparse Prediction:{Faster R-CNN、R-FCN、...}
YOLOv5包括:
- Backbone:Focus、BottleneckCSP、SPP
- Head:PANet+Detect(YOLOv3/v4 Head)
4.1 网络可视化工具:Netron

在线版本链接:https://lutzroeder.github.io/netron/
netron官方的Github链接:https://github.com/lutzroeder/netron
netron对pt格式的权重文件兼容性不好,直接使用netron工具打开,无法现实整个网络。
可使用YOLOv5代码中models/export.py脚本将pt权重文件转换为onnx格式,再用netron工具打开,就可以看YOLOv5的整体架构。
导出ONNX文件
pip install onnx>=1.7.0 -i https://pypi.tuna.tsinghua.edu.cn/simple #for ONNX export
pip install coremltools==4.0-i https://pypi.tuna.tsinghua.edu.cn/simple #for Coreml export
python models.export.py --weights weights.yolov5s.pt --img 640 --batch 1
预览YOLOv5在netron中的网络结构图:链接.
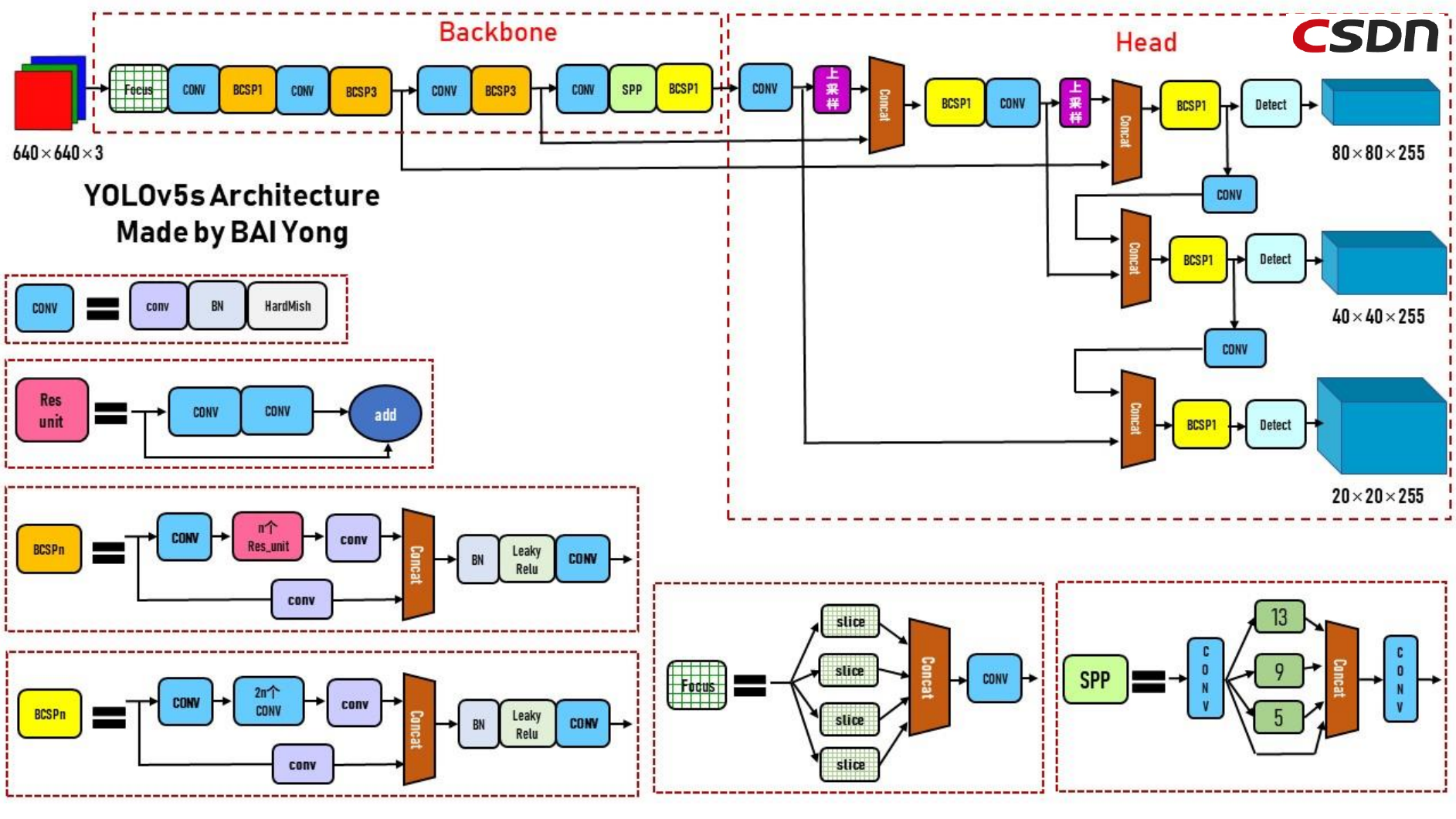
借助于上面的Netron工具得到的网络结构图,我们可以画出下面这样的网络架构图,对此进行做一个全局把握。
其中Conv表示由Conv(卷积)、BN(Batch Normalization归一化)和Hard-swish(非线性激活)三个操作组合成的运算。
Bottleneck为瓶颈部分运算操作,若Bottleneck为True时,本操作为两个Conv操作相加得到的结果,若Bottleneck为False,则操作为两个Conv卷积。
同时,BCSPn为Conv->Bottleneck->conv与conv拼接,再进行BN(Batch Normalization)和后续的Relu(非饱和激活函数)卷积,防止“梯度消失”,加快收敛速度。
而Focus操作,需要对其进行四个Slice分片,再进行重新拼接后卷积。
SPP操作前后都需要conv,中间有三种不同尺度大小的层级进行选择处理。
图片从输入层开始传入模型,经过复杂的主干网络,最终流向Head头部网络的DarkNet去做处理。
4.2 灵活配置不同复杂度的模型
(应用类似EfficientNet的channel和layer控制因子)
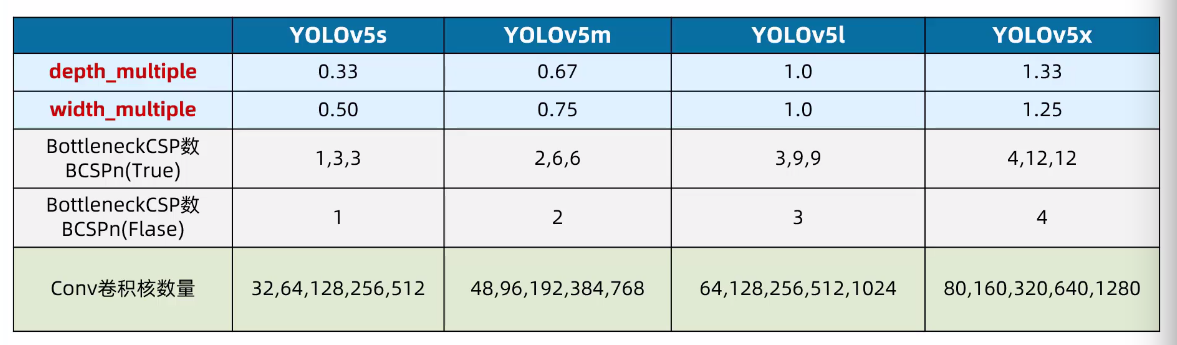
YOLOv5的四种网络结构是depth_multiple和width_multiple两个参数,来进行控制网络的深度和宽度。其中,depth_multiple控制网络的深度(BottleneckCSP数),width_multiple控制网络的宽度(卷积核数量)。
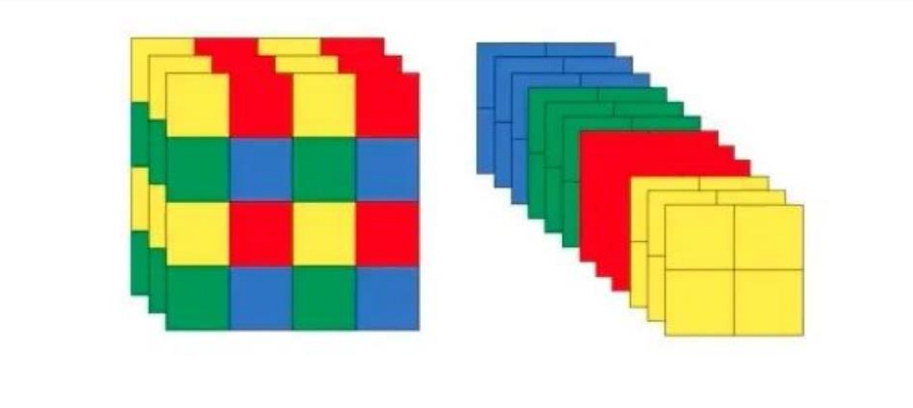
4.3 Focus机制
把数据切分为4份,每份数据都是相当于2倍下采样得到的,然后在channel维度进行拼接,最后进行卷积操作。
这里可以做一个小实验:
# 新增一个tensor x
tensor([[[[11,12,13,14],
21,22,23,24],
31,32,33,34],
41,42,43,44]]]])
拆分后,得到四份数据
tensor([[[[11,13],[31,33]],
[[21,23],[41,43]],
[[12,14],[32,34]],
[[22,24],[42,44]]]])
Focus() module模块被设计是用来减少FLOPS和增加速度,但不增加mAP。
在YOLOV5中,作者希望降低二维卷积Conv2d计算的成本,并实际使用张量reshape来减少空间(分辨率)和增加深度(通道数)
输入将按如下方式转换:[b,c,h,w]->[b,c*4,h//2,w//2]
以YOLOv5s的结构为例,原始640×640×3的图像输入Focus结构,采用切片结构,先变成320×320×12的特征图,再经过一次32个卷积核的卷积操作,最终变成320×320×32的特征图。
而YOLOv5m的Focus结构中的卷积操作使用了48个卷积核,因此Focus结构后的特征图变成320×320×48。YOLOv5l,YOLOv5x也是同样的道理。
4.4 SPP(Spatial Pyramid Pooling)空间金字塔池化
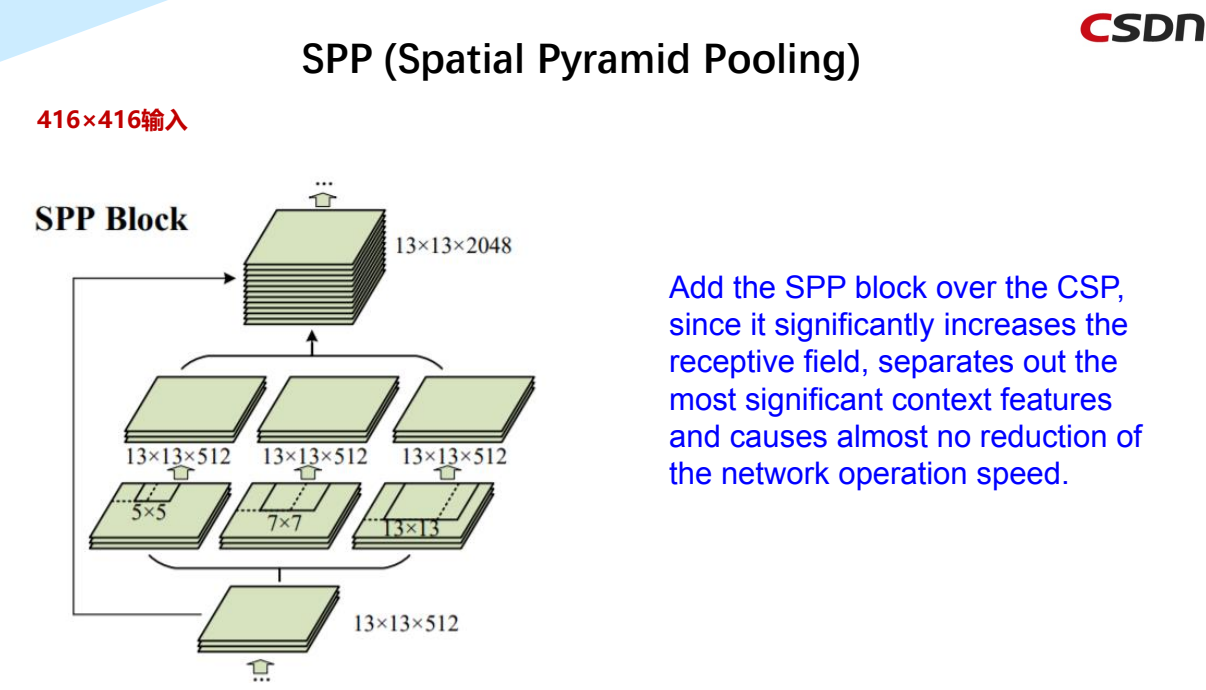
在CSP上添加SPP块,因为它显著增加了感受野,分离出最重要的上下文特征,并且几乎不会降低网络运行速度
4.5 Hard Swish激活函数

4.6 PANet(Path-Aggregation Network)路径聚合网络
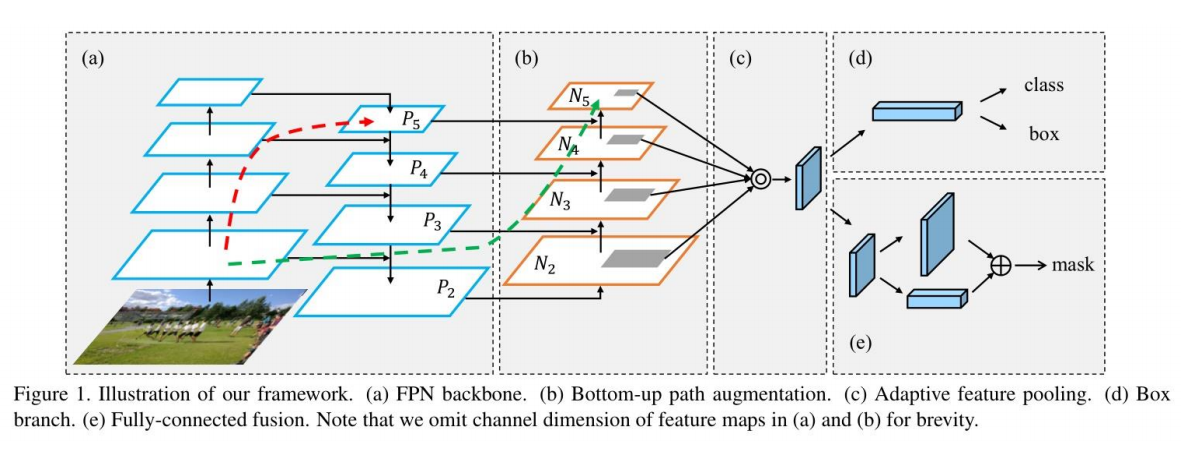
对上图进行以下说明:(注意,为了简洁起见,我们省略了(a)和(b)中特征映射的通道维度)
a) FPN backbone FPN主干网络
b) Bottom-up path augmentation 自底向上路径扩充
c) Adaptive feature pooling 自适应特征池
d) Box branch Box分支
e) Fully-connected fusion 全连通结合
4.7 YOLOv5损失函数
YOLOv5损失函数包括:
- classification loss,分类损失
- localization loss,定位损失(预测框与GT(Ground Truth)框之间的误差)
- confidence loss,置信度损失(框的目标性;objectness of the box)
总的损失函数:
classification loss + localization loss + confidence loss
YOLOv5使用二元交叉熵损失函数计算类别概率和目标置信度得分的损失。
YOLOv5使用C-LoU Loss作为bounding box回归的损失。
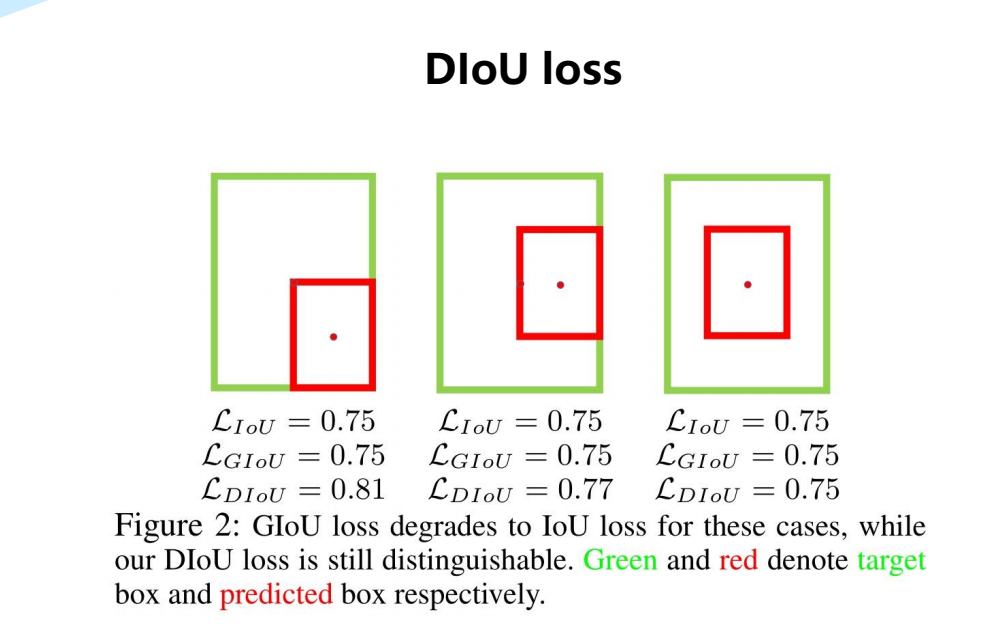
-
针对包围盒回归提出了一种距离lou损失,即Dlou损失,它比lou损失和Glou损失具有更快的收敛速度。
-
通过考虑重叠面积、中心点距离和纵横比这三个几何度量,进一步提出了完整的lou损失,即Clou损失,它更好地描述了矩形盒的回归。
五、YOLOv5 实战训练自己的数据集
5.1 软件安装及环境配置
5.1.1 安装Anaconda
Anaconda是一个用于科学计算的Python发行版,支持Linux、Mac、Windows,包含了众多流行的科学计算、数据分析的Python包。
安装步骤:
1.先去官方地址下载好对应的安装包
下载地址:https://www.anaconda.com/download/#linux
2.然后,安装anaconda
bash Anaconda3-2021.05-Linux-x86_64.sh
anaconda会自动将环境变量添加到PATH里面,如果后面你发现输入conda提示没有该命令,那么
你需要执行命令 source ~/.bashrc 更新环境变量,就可以正常使用了。
如果发现这样还是没用,那么需要添加环境变量。
编辑~/.bashrc 文件,在最后面加上
export PATH=/home/user/anaconda3/bin:$PATH
注意:路径应改为自己机器上的路径
保存退出后执行: source ~/.bashrc
再次输入 conda list 测试看看,应该没有问题。
5.1.2 安装Anaconda国内镜像配置
清华TUNA提供了 Anaconda 仓库的镜像,运行以下三个命令:
conda config --add channels
https://mirrors.tuna.tsinghua.edu.cn/anaconda/pkgs/free/
conda config --add channels
https://mirrors.tuna.tsinghua.edu.cn/anaconda/pkgs/main/
conda config --set show_channel_urls yes
5.1.3 安装pytorch
更新:如果使用yolov5版本v5.0以上的代码,使用pytorch1.8
首先为pytorch创建一个anaconda虚拟环境,环境名字可自己确定,这里本人使用pytrain作为环境
名:
conda create -n pytrain python=3.8
安装成功后激活pytrain环境:
conda activate pytrain
在所创建的pytorch环境下安装pytorch的1.8版本, 执行命令:
conda install pytorch torchvision cudatoolkit=10.2 -c pytorch
注意:10.2处应为cuda的安装版本号
编辑~/.bashrc 文件,设置使用pytrain环境下的python3.8
alias python='/home/bai/anaconda3/envs/pytrain/bin/python3.8'
注意:python路径应改为自己机器上的路径
保存退出后执行: source ~/.bashrc
该命令将自动回到base环境,再执行 conda activate pytrain 到pytorch环境。
5.2 YOLOv5项目克隆和安装
5.2.1 克隆YOLOv5项目
网址: https://github.com/ultralytics/yolov5
git clone https://github.com/ultralytics/yolov5.git
或者直接下载YOLOv5的5.0版本的代码。
下载后可重命名项目文件夹
5.2.2 安装所需库
在yolov5目录下执行:
pip install -r requirements.txt -i https://pypi.tuna.tsinghua.edu.cn/simple
注意:simple 不能少, 是 https 而不是 http
5.2.3 下载预训练权重文件
下载yolov5s.pt,yolov5m.pt,yolov5l.pt,yolov5x.pt权重文件,并放置在weights文件夹下
百度网盘下载链接:
链接:https://pan.baidu.com/s/1p1HS0gpWZy55dShj3ihLRQ
提取码:0sao
更新:如果使用yolov5版本v5.0以上的代码,下载相应的权重。
7.2.4 安装测试
python detect.py --source ./data/images/ --weights weights/yolov5s.pt
5.3 标注自己的数据集
5.3.1 安装图像标注工具labelImg
这里的安装大致有两种方式,一种是直接pip install,另一种是克隆源码进行编译,推荐优先使用第一种。
第一种安装方式:
conda create -n label python=3.8
conda activate label
pip install labelImg
打开方式,在label环境下命令行输入labelImg打开即可。
第二种安装方式:
克隆labelImg
git clone https://github.com/tzutalin/labelImg.git
使用Anaconda安装
到labelImg路径下执行命令
conda install pyqt=5
pip install lxml
pyrcc5 -o libs/resources.py resources.qrc
python labelImg.py
5.3.2 添加自定义类别
修改文件labelImg/data/predefined_classes.txt:
ball
messi
trophy
5.3.3 使用labelImg进行图像标注
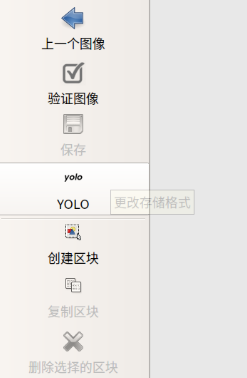
打开labelImg,可以看到如下界面:

说明:由于这里是直接pip install安装,且系统语言又是中文,因此界面语言也保持一致。
最左边一栏相当于是标注的操作栏,我们通过创建区块,也即为标注边界框并界定分类标签名。
对一张样本图片操作完毕后,Ctrl+S进行保存,这时会采用默认的PascalVOC的格式,也即将标记信息存在同名的xml文件。
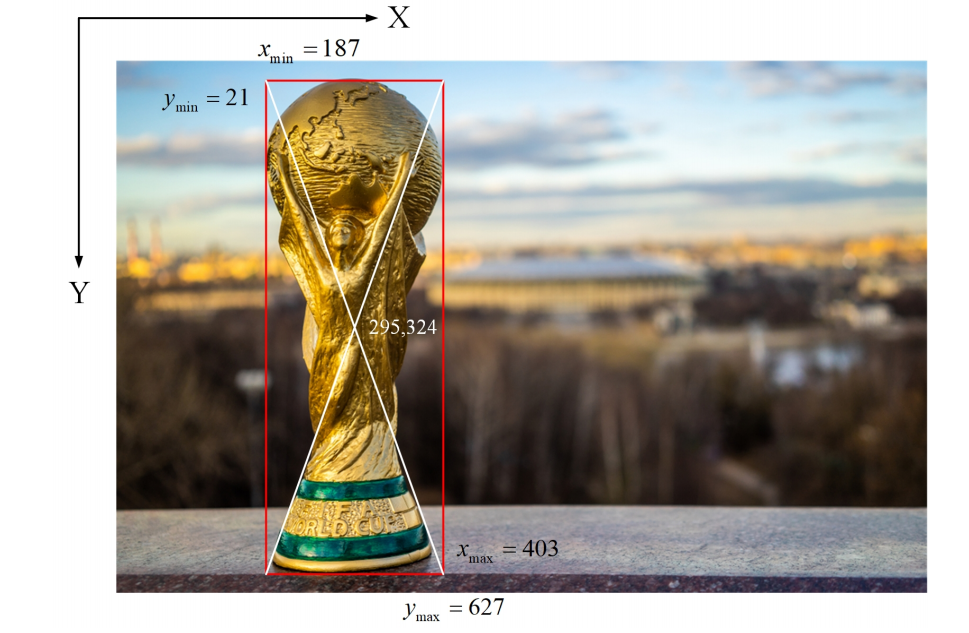
需要说明的是,对上图来说,图像的坐标原点在左上角,水*方向为X轴,竖直方向为Y轴。图中边界框由几个要素组成,即x_min,y_min,x_max,y_max,这些通过xml的结构存储为标注信息文件。
查看xml对应的格式,如下
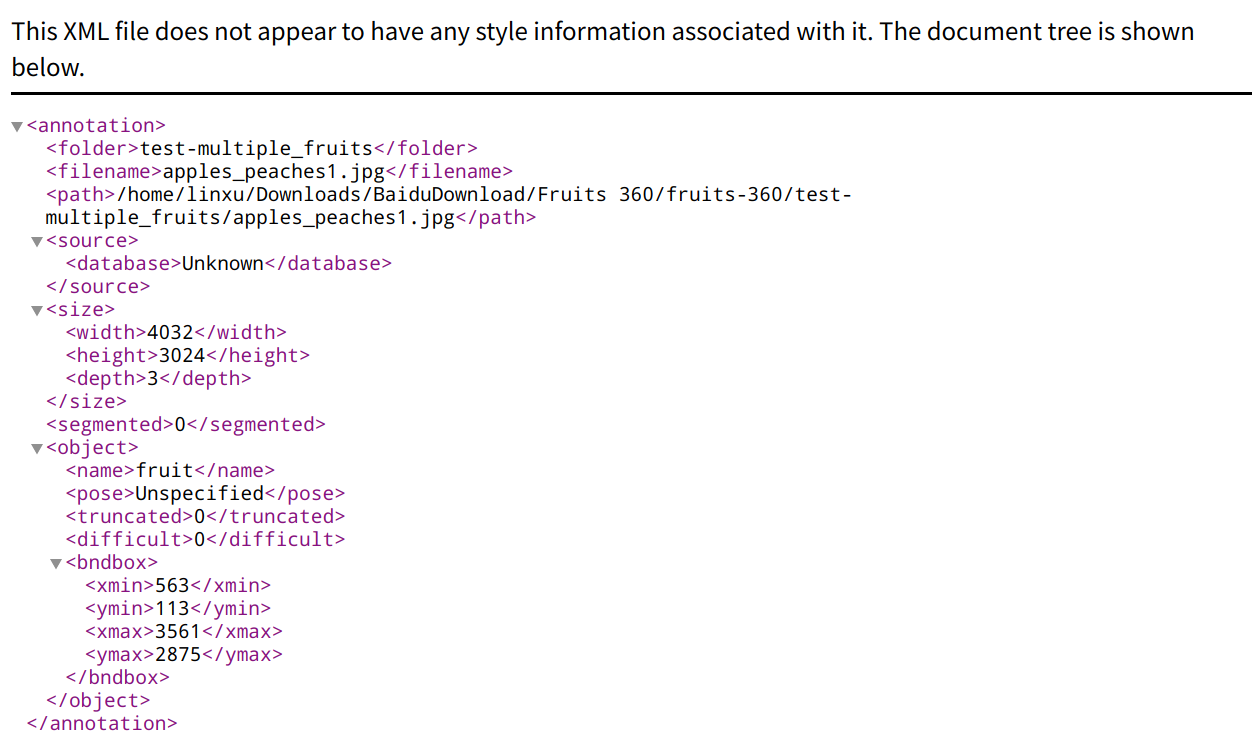
但由于YOLO系列对于标注文件的要求格式为YOLO类型的,因此还需要将其转换为对应的txt格式。
YOLO格式的txt标记文件如下:
class_id x y w h
class_id: 类别的id编号
x: 目标的中心点x坐标(横向)/图片总宽度
y: 目标的中心的y坐标(纵向)/图片总高度
w: 目标框的宽带/图片总宽度
h: 目标框的高度/图片总高度
如下图所示:

- 可以用python代码实现两种标记格式的转换:
def convert(size, box):
dw = 1./size[0]
dh = 1./size[1]
# box[0]:xmin,box[1]: xmax
x = (box[0] + box[1])/2.0
# box[2]: ymin,box[3]: ymax
y = (box[2] + box[3])/2.0
w = box[1] - box[0]
h = box[3] - box[2]
x = x*dw
w = w*dw
y = y*dh
h = h*dh
return (x,y,w,h)
当然,也可以在操作栏中直接更换保存为YOLO格式的txt文件,这样就可以直接使用,无需转换。
5.4 准备自己的数据集
5.4.1 下载项目文件
从百度文件下载到yolov5目录下并解压
- VOCdevkit_ball.zip
- testfiles.zip
- prepare_data.py

5.4.2 解压建立或自行建立数据集
使用PASCAL VOC数据集的目录结构:
建立文件夹层次为yolov5/data/VOCdevkit/VOC2007
VOC2007下建立两个文件夹:Annotations和JPEGImages
JPEGImages放所有的训练和测试图片;
Annotations放所有的xml标记文件。
5.4.3 生成训练集和验证集文件
新建Python脚本
touch prepare_data.py
gedit prepare_data.py
- prepare_data.py
import xml.etree.ElementTree as ET
import pickle
import os
from os import listdir, getcwd
from os.path import join
import random
from shutil import copyfile
# 分类类别
classes = ["ball", "messi"]
# classes=["ball"]
# 划分训练集比率
TRAIN_RATIO = 80
def clear_hidden_files(path):
'''
清除目录下隐藏文件
:param path:
:return:
'''
dir_list = os.listdir(path)
for i in dir_list:
abspath = os.path.join(os.path.abspath(path), i)
if os.path.isfile(abspath):
if i.startswith("._"):
os.remove(abspath)
else:
clear_hidden_files(abspath)
def convert(size, box):
'''
转换格式
:param size:
:param box:
:return:
'''
dw = 1. / size[0]
dh = 1. / size[1]
x = (box[0] + box[1]) / 2.0
y = (box[2] + box[3]) / 2.0
w = box[1] - box[0]
h = box[3] - box[2]
x = x * dw
w = w * dw
y = y * dh
h = h * dh
return (x, y, w, h)
def convert_annotation(image_id):
'''
转换annotation
:param image_id:
:return:
'''
in_file = open('data/VOCdevkit/VOC2007/Annotations/%s.xml' % image_id)
out_file = open('data/VOCdevkit/VOC2007/YOLOLabels/%s.txt' % image_id, 'w')
tree = ET.parse(in_file)
root = tree.getroot()
size = root.find('size')
w = int(size.find('width').text)
h = int(size.find('height').text)
for obj in root.iter('object'):
difficult = obj.find('difficult').text
cls = obj.find('name').text
if cls not in classes or int(difficult) == 1:
continue
cls_id = classes.index(cls)
xmlbox = obj.find('bndbox')
b = (float(xmlbox.find('xmin').text), float(xmlbox.find('xmax').text), float(xmlbox.find('ymin').text),
float(xmlbox.find('ymax').text))
bb = convert((w, h), b)
out_file.write(str(cls_id) + " " + " ".join([str(a) for a in bb]) + '\n')
in_file.close()
out_file.close()
if __name__ == '__main__':
wd = os.getcwd()
data_base_dir = os.path.join(wd, "data/VOCdevkit/")
if not os.path.isdir(data_base_dir):
os.mkdir(data_base_dir)
work_sapce_dir = os.path.join(data_base_dir, "VOC2007/")
if not os.path.isdir(work_sapce_dir):
os.mkdir(work_sapce_dir)
annotation_dir = os.path.join(work_sapce_dir, "Annotations/")
if not os.path.isdir(annotation_dir):
os.mkdir(annotation_dir)
clear_hidden_files(annotation_dir)
image_dir = os.path.join(work_sapce_dir, "JPEGImages/")
if not os.path.isdir(image_dir):
os.mkdir(image_dir)
clear_hidden_files(image_dir)
yolo_labels_dir = os.path.join(work_sapce_dir, "YOLOLabels/")
if not os.path.isdir(yolo_labels_dir):
os.mkdir(yolo_labels_dir)
clear_hidden_files(yolo_labels_dir)
yolov5_images_dir = os.path.join(data_base_dir, "images/")
if not os.path.isdir(yolov5_images_dir):
os.mkdir(yolov5_images_dir)
clear_hidden_files(yolov5_images_dir)
yolov5_labels_dir = os.path.join(data_base_dir, "labels/")
if not os.path.isdir(yolov5_labels_dir):
os.mkdir(yolov5_labels_dir)
clear_hidden_files(yolov5_labels_dir)
yolov5_images_train_dir = os.path.join(yolov5_images_dir, "train/")
if not os.path.isdir(yolov5_images_train_dir):
os.mkdir(yolov5_images_train_dir)
clear_hidden_files(yolov5_images_train_dir)
yolov5_images_test_dir = os.path.join(yolov5_images_dir, "val/")
if not os.path.isdir(yolov5_images_test_dir):
os.mkdir(yolov5_images_test_dir)
clear_hidden_files(yolov5_images_test_dir)
yolov5_labels_train_dir = os.path.join(yolov5_labels_dir, "train/")
if not os.path.isdir(yolov5_labels_train_dir):
os.mkdir(yolov5_labels_train_dir)
clear_hidden_files(yolov5_labels_train_dir)
yolov5_labels_test_dir = os.path.join(yolov5_labels_dir, "val/")
if not os.path.isdir(yolov5_labels_test_dir):
os.mkdir(yolov5_labels_test_dir)
clear_hidden_files(yolov5_labels_test_dir)
train_file = open(os.path.join(wd, "data/yolov5_train.txt"), 'w')
test_file = open(os.path.join(wd, "data/yolov5_val.txt"), 'w')
train_file.close()
test_file.close()
train_file = open(os.path.join(wd, "data/yolov5_train.txt"), 'a')
test_file = open(os.path.join(wd, "data/yolov5_val.txt"), 'a')
list_imgs = os.listdir(image_dir) # list image files
prob = random.randint(1, 100)
print("Probability: %d" % prob)
for i in range(0, len(list_imgs)):
path = os.path.join(image_dir, list_imgs[i])
if os.path.isfile(path):
image_path = image_dir + list_imgs[i]
voc_path = list_imgs[i]
(nameWithoutExtention, extention) = os.path.splitext(os.path.basename(image_path))
(voc_nameWithoutExtention, voc_extention) = os.path.splitext(os.path.basename(voc_path))
annotation_name = nameWithoutExtention + '.xml'
annotation_path = os.path.join(annotation_dir, annotation_name)
label_name = nameWithoutExtention + '.txt'
label_path = os.path.join(yolo_labels_dir, label_name)
prob = random.randint(1, 100)
print("Probability: %d" % prob)
# 训练集
if (prob < TRAIN_RATIO):
if os.path.exists(annotation_path):
train_file.write(image_path + '\n')
# 转换label
convert_annotation(nameWithoutExtention)
copyfile(image_path, yolov5_images_train_dir + voc_path)
copyfile(label_path, yolov5_labels_train_dir + label_name)
else:
# 测试集
if os.path.exists(annotation_path):
test_file.write(image_path + '\n')
# 转换label
convert_annotation(nameWithoutExtention)
copyfile(image_path, yolov5_images_test_dir + voc_path)
copyfile(label_path, yolov5_labels_test_dir + label_name)
train_file.close()
test_file.close()
执行Python脚本:
python prepare_data.py
注意:classes=["ball","messi"]要根据自己的数据集类别做相应的修改
-
在VOCdevkit/VOC2007目录下可以看到生成了文件夹YOLOLabels
YOLOLabels下的文件是images文件夹下每一个图像的yolo格式的标注文件,这是由annotations的xml标注文件转换来的;
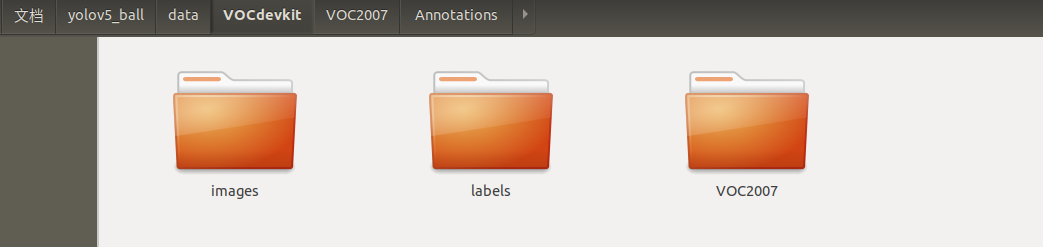
-
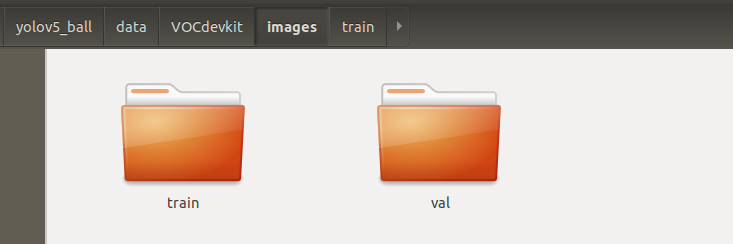
在VOCdevkit目录下生成了images和labels文件夹
images文件夹下有train和val文件夹,分别放置训练集和验证集图片;
labels文件夹有train和val文件夹,分别放置训练集和验证集标签(yolo格式)
-
在yolov5下生成了两个文件yolov5_train.txt和yolov5_val.txt。
yolov5_train.txt和yolov5_val.txt分别给出了训练图片文件和验证图片文件的列表,含有每个图片的路径和文件名。

5.5 修改配置文件
5.5.1 新建文件data/voc_ball.yaml
为了对于定制数据集进行专门的训练,这里需要新建对应的配置文件。
可以复制data/voc.yaml再根据自己情况和需要进行修改;
将复制后得到的文件重命名为voc_ball.yaml
然后,修改配置参数
# download command/URL (optional)
#download: bash data/scripts/get_voc.sh
# train and val data as 1) directory: path/images/, 2) file: path/images.txt, or
3) list: [path1/images/, path2/images/]
train: ./VOCdevkit/images/train/
val: ./VOCdevkit/images/val/
# number of classes
nc: 1
# class names
names: ['ball']
5.5.2 新建文件models.yolov5s_ball.yaml
可以复制models/yolov5s.yaml再根据自己的情况修改;
可以重命名为models/yolov5s_ball.yaml
然后,修改配置参数
nc: 1 # number of classes
5.6 使用wandb训练可视化工具
wandb(Weight&Biases)是一个类似于tensorboard的在线模型训练可视化工具。
YOLOv5(v4.0 release开始)集成了Weights&Biases,可以方便的追踪模型训练的整个过程,包括模型的性能、超参数、GPU的使用情况、模型预测等。
5.6.1 注册和安装wandb
注册wandb
到其官网https://wandb.ai/home 注册
安装wandb
执行
pip install wandb
wandb: You can find your API key in your browser here: https://wandb.ai/authorize
wandb: Paste an API key from your profile and hit enter:
登录后有 Copy this key and paste it into your command line to authorize it.
本地使用wandb:
wandb网站有时挺卡,wandb也有本地使用方式。参考:https://docs.wandb.ai/self-hosted/local,
配置好后可以本地访问。
关闭wandb:
如需要关闭wandb,可把代码文件utils/wandb_logging/wandb_utils.py中的
try:
import wandb
from wandb import init, finish
except ImportError:
wandb = None
修改为
wandb = None
5.6.2 在代码中修改项目名称
在utils/wandb_logging/wandb_utils.py中
self.wandb_run = wandb.init(config=opt,resume="allow",project='YOLOv5-Ball-Ubuntu' if opt.project
== 'runs/train' else Path(opt.project).stem,
name=name,
job_type=job_type,
id=run_id) if not wandb.run else wandb.run
5.7 训练自己的数据集
5.7.1 训练命令
在yolov5路径下执行:
使用YOLOv5s训练命令:
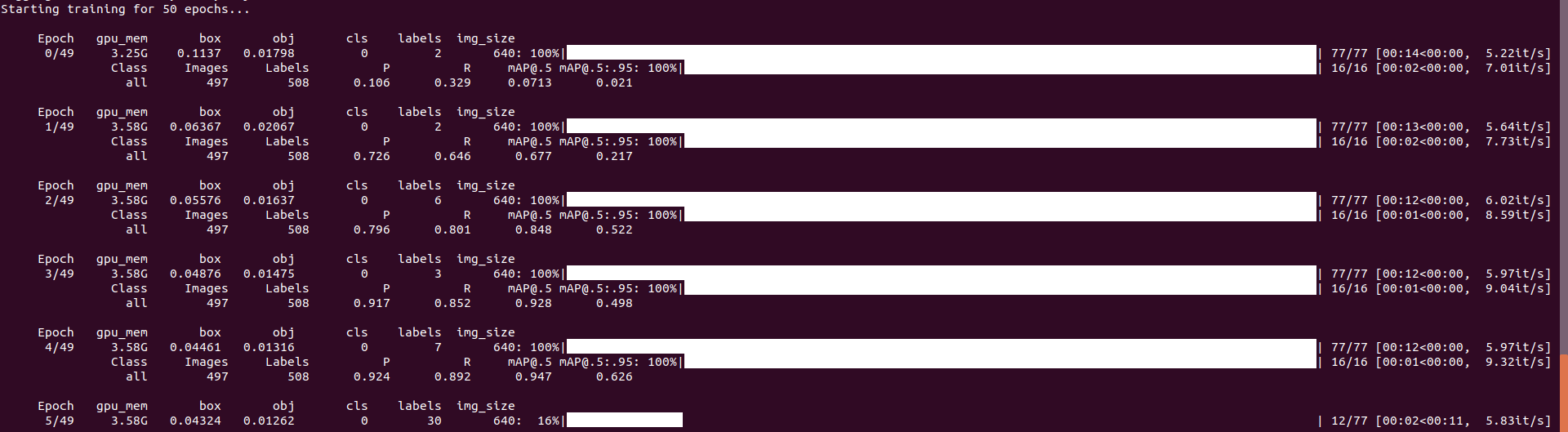
python train.py --data data/voc_ball.yaml --cfg models/yolov5s_ball.yaml --weights weights/yolov5s.pt --batch-size 16 --epochs 50 --workers 4 --name bm-yolov5s
使用YOLOv5x训练命令:
python train.py --data data/voc_ball.yaml --cfg models/yolov5x_ball.yaml --weights weights/yolov5x.pt --batch-size 8 --epochs 100 --workers 4 --name bm-yolov5x
注意:如果出现显存溢出,可减少batch-size
开始训练,如下所示

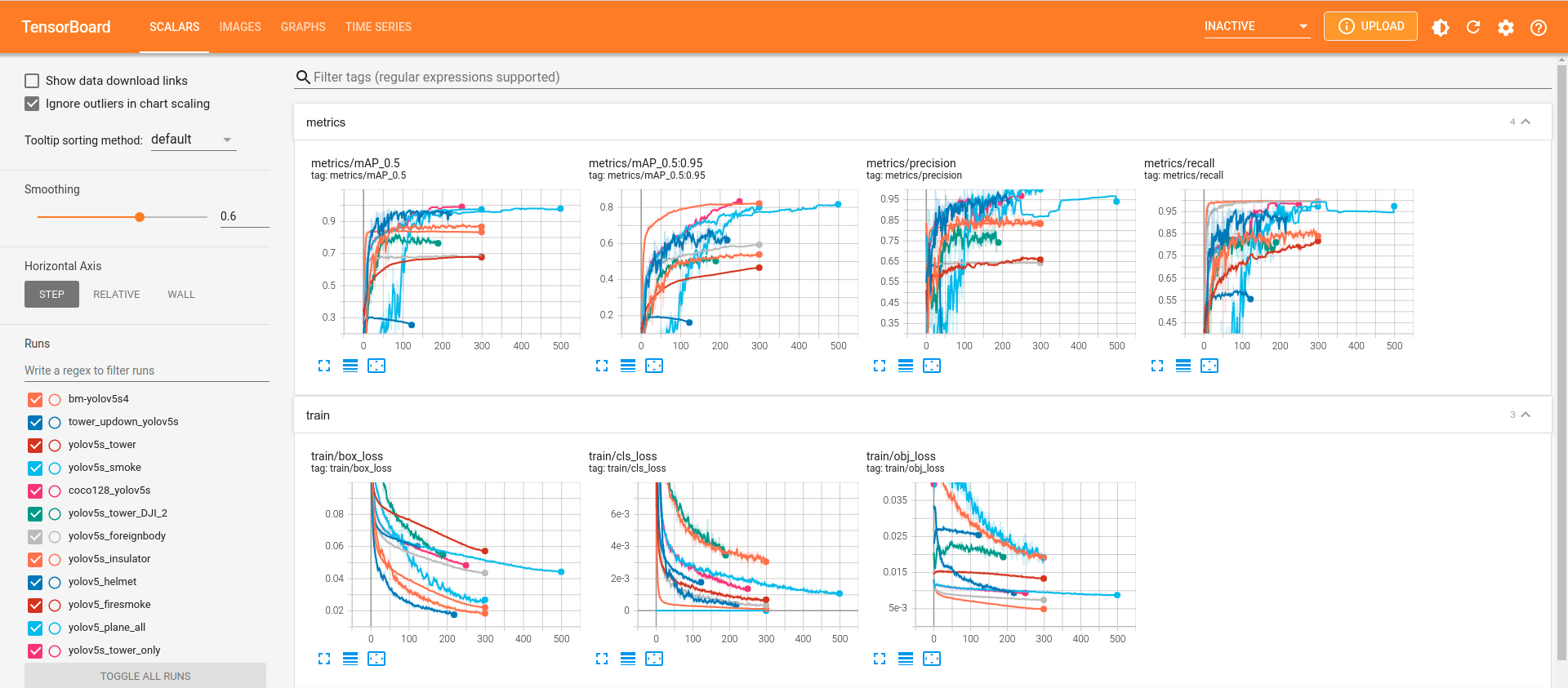
5.7.2 训练过程可视化
在yolov5路径下执行:
tensorboard --logdir=./runs
7.7.3 训练结果的查看
查看runs目录下的文件
5.8 测试训练出的网络模型
5.8.1 测试图片
yolo5路径下执行:
使用yolov5s训练出的权重
python detect.py --source ./testfiles/img1.jpg --weights runs/train/bmyolov5s/weights/best.pt
使用yolov5x训练出的权重
python detect.py --source ./testfiles/img1.jpg --weights runs/train/bmyolov5x/weights/best.pt
5.8.2 测试视频
yolov5路径下执行:
使用yolov5s训练出的权重
python detect.py --source ./testfiles/messi.mp4 --weights runs/train/bmyolov5s/weights/best.pt
使用yolov5x训练出的权重
python detect.py --source ./testfiles/messi.mp4 --weights runs/train/bmyolov5x/weights/best.pt
注:
- 1)批量处理文件夹下的图片和视频可以指定文件夹的名字,如--source ./testfiles
- 2)命令后可加上目标的置信度阈值,如--conf-thres 0.4
5.8.3 性能统计
yolo5路径下执行
使用yolov5s训练出的权重
python test.py --data data/voc_bm.yaml --weights runs/train/bmyolov5s/weights/best.pt --batch-size 16
使用yolov5x训练出的权重
python test.py --data data/voc_bm.yaml --weights runs/train/bmyolov5x/weights/best.pt --batch-size 16

