ARM Cortex-M3权威指南-基础(1)
cortex-M3简评
- 高性能
许多指令都是单周期的——包括乘法相关指令。并且从整体性能上, Cortex-M3 比得过绝大多数其它的架构。
指令总线和数据总线被分开,取值和访内可以并行不悖
Thumb-2 的到来告别了状态切换的旧世代,再也不需要花时间来切换于 32 位 ARM 状态和16 位 Thumb 状态之间了。这简化了软件开发和代码维护,使产品面市更快。
Thumb-2 指令集为编程带来了更多的灵活性。许多数据操作现在能用更短的代码搞定,这意味着 Cortex-M3 的代码密度更高,也就对存储器的需求更少。
取指都按 32 位处理。同一周期最多可以取出两条指令,留下了更多的带宽给数据传输。
Cortex-M3 的设计允许单片机高频运行(现代半导体制造技术能保证 100MHz 以上的速度)。即使在相同的速度下运行, CM3 的每指令周期数(CPI)也更低,于是同样的 MHz 下可以做更多的工作;另一方面,也使同一个应用在 CM3 上需要更低的主频。
- 先进的中断处理功能
内建的嵌套向量中断控制器支持多达 240 条外部中断输入。向量化的中断功能剧烈地缩短了中断延迟,因为不再需要软件去判断中断源。中断的嵌套也是在硬件水平上实现的,不需要软件代码来实现。
Cortex-M3 在进入异常服务例程时,自动压栈了 R0-R3, R12, LR, PSR 和 PC,并且在返回时自动弹出它们,这多清爽!既加速了中断的响应,也再不需要汇编语言代码了。
NVIC 支持对每一路中断设置不同的优先级,使得中断管理极富弹性。最粗线条的实现也至少要支持 8 级优先级,而且还能动态地被修改。
优化中断响应还有两招,它们分别是“咬尾中断机制”和“晚到中断机制”。
有些需要较多周期才能执行完的指令,是可以被中断-继续的——就好比它们是一串指令一样。这些指令包括加载多个寄存器(LDM),存储多个寄存器(STM),多个寄存器参与的PUSH,以及多个寄存器参与的 POP。
除非系统被彻底地锁定, NMI(不可屏蔽中断)会在收到请求的第一时间予以响应。对于很多安全-关键(safety-critical)的应用, NMI 都是必不可少的。
- 调试支持
在支持传统的 JTAG 基础上,还支持更新更好的串行线调试接口。
基于 CoreSight 调试解决方案,使得处理器哪怕是在运行时,也能访问处理器状态和存储器内容。
内建了对多达 6 个断点和 4 个数据观察点的支持。
可以选配一个 ETM,用于指令跟踪。数据的跟踪可以使用 DWT
在调试方面还加入了以下的新特性,包括 fault 状态寄存器,新的 fault 异常,以及闪存修补 (patch)操作,使得调试大幅简化。
可选 ITM 模块,测试代码可以通过它输出调试信息,而且“拎包即可入住”般地方便使用。
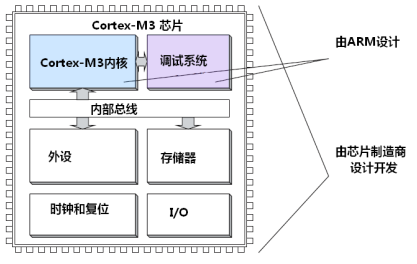
基于cortex-M3的芯片设计
Cortex-M3处理器内核是芯片的中央处理单元,完整的MCU还需要很多其他组件,例如存储,外设,IO等。芯片设计商得到CM3核的授权后,就会把CM3用到自己的芯片中,做一些定制化的设计,所以不同的厂商有不同的配置,想了解具体型号的处理器需要查阅厂家提供的文档,比如stm32,nxp,ti,Freescale。基于ARM低成本和高效的处理器设计方案, 得到授权的厂商生产了多种多样的的处理器、 单片机以及片上系统(SoC)。这种商业模式就是所谓的“知识产权授权”。
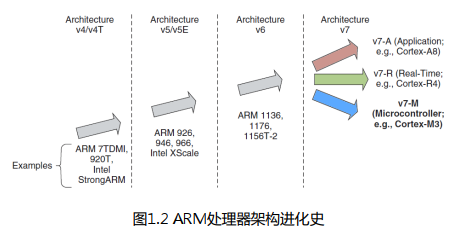
ARM发展历史
ARMv7架构的闪亮登场。在这个版本中,内核架构首次从单一款式变成3种款式。
款式A:设计用于高性能的“开放应用平台”——越来越接近电脑了
款式R:用于高端的嵌入式系统,尤其是那些带有实时要求的——又要快又要实时。
款式M:用于深度嵌入的,单片机风格的系统中——本书的主角。
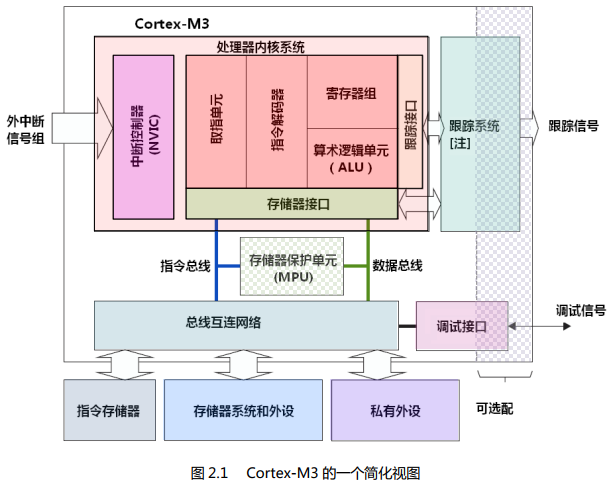
M3架构图
Cortex-M3 是一个32位处理器内核。内部的数据路径是32位的,寄存器是32位的,存储器接口也是32位的。 CM3采用了哈佛结构,拥有独立的指令总线和数据总线,可以让取指与数据访问并行不悖。这样一来数据访问不再占用指令总线,从而提升了性能。Both 小端模式和大端模式都是支持的。
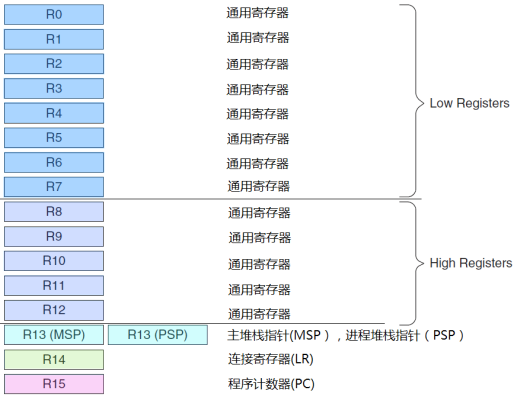
寄存器组
Cortex-M3 处理器拥有 R0-R15 的寄存器组。其中 R13 作为堆栈指针 SP。 SP 有两个,但在同一时刻只能有一个可以看到,这也就是所谓的“banked”寄存器。复位后,寄存器默认值不确定。
- R0-R12通用寄存器:R0-R12 都是32位通用寄存器,用于数据操作。但是注意:绝大多数16位 Thumb 指令只能访问 R0-R7,而 32 位 Thumb-2 指令可以访问所有寄存器。
- Banked R13两个堆栈指针:Cortex-M3 拥有两个堆栈指针,然而它们是 banked,因此任一时刻只能使用其中的一个。
主堆栈指针(MSP):复位后缺省使用的堆栈指针,用于操作系统内核以及异常处理例程(包括中断服务例程)
进程堆栈指针(PSP):由用户的应用程序代码使用。
- R14链接寄存器:当呼叫一个子程序时,由 R14 存储返回地址。
- R15程序计数寄存器:指向当前的程序地址。如果修改它的值,就能改变程序的执行流(很多高级技巧就在这里面)。
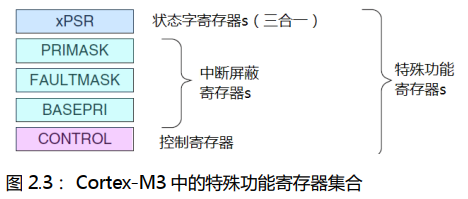
- 特殊功能寄存器,Cortex-M3 还在内核水平上搭载了若干特殊功能寄存器,包括
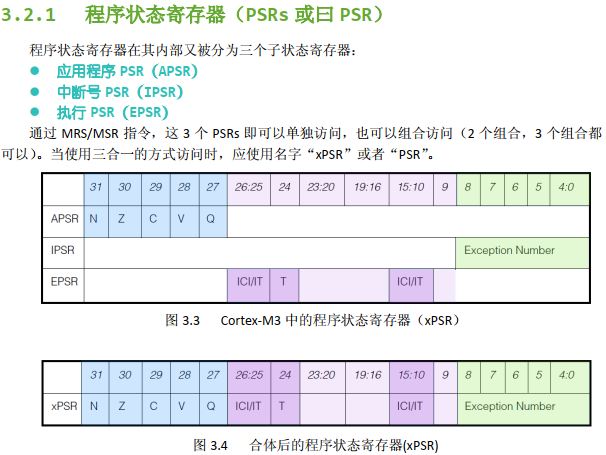
- 程序状态字寄存器组(PSRs)
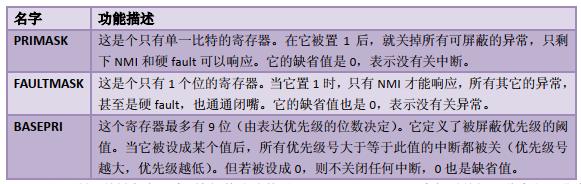
- 中断屏蔽寄存器组(PRIMASK, FAULTMASK, BASEPRI)
- 控制寄存器(CONTROL)
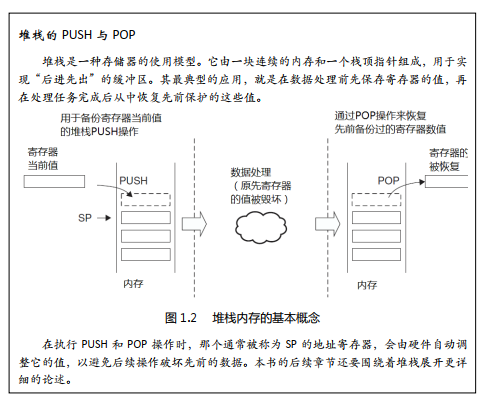
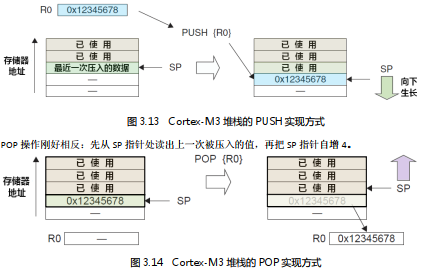
- R13堆栈寄存器的作用
通常在进入一个子程序后,第一件事就是把寄存器的值先 PUSH 入堆栈中,在子程序退出前再 POP 曾经 PUSH 的那些寄存器。另外, PUSH 和 POP 还能一次操作多个寄存器。
操作一个寄存器

操作多个寄存器
- R14链接寄存器的作用
R14 是连接寄存器(LR)。在一个汇编程序中,你可以把它写作 both LR 和 R14。 LR 用于在调用子程序时存储返回地址。例如,当你在使用 BL(分支并连接, Branch and Link)指令时,就自动填充 LR的值。
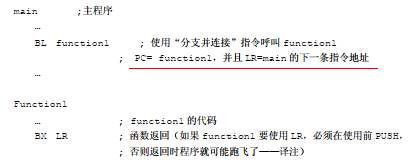
赋值PC/LR时,LSB总是1,用以表明是Thumb状态下执行,倘若写了0,就会产生fault异;但是读取PC时LSB是0,LR的LSR是1。
- 特殊功能寄存器组
仅当在特权级下操作时才允许操作CONCTRL。一旦进入了用户级,唯一返回特权级的途径,就是触发一个(软)中断,再由服务例程改写该位。
对于时间-关键任务而言,恰如其分地使用 PRIMASK 和 BASEPRI 来暂时关闭一些中断是非常重要的。而 FAULTMASK 则可以被 OS 用于暂时关闭 fault 处理机能,这种处理在某个任务崩溃时可能需要。因为在任务崩溃时,常常伴随着一大堆 faults。在系统料理“后事”时,通常不再需要响应这些 fault——人死帐清。总之 FAULTMASK 就是专门留给 OS 用的。

注意:如果是在idle流程中观察PRIMASK,由于idle流程锁中断了,连接仿真器时刚从WFI指令退出,还停留在idle流程中,因此PRIMASK是1。
- 控制寄存器(CONTROL)
控制寄存器有两个用途,1用于定义特权级别,其二用于选择当前使用哪个堆栈指针。由两个比特来行使这两个职能。
- CONTROL[1]:在 Cortex-M3 的 handler 模式中,CONTROL[1]总是 0。在线程模式中则可以为 0 或 1。因此,仅当处于特权级的线程模式下,此位才可写,其它场合下禁止写此位。
- CONTROL[0]:仅当在特权级下操作时才允许写该位。一旦进入了用户级,唯一返回特权级的途径,就是触发一个(软)中断,再由服务例程改写该位。
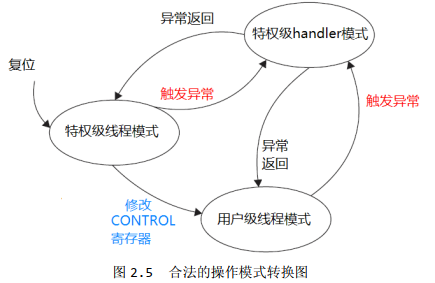
操作模式和特权级别
- 操作模式:处理者模式(handler mode)和线程模式(thread mode)。引入两个模式的本意,是用于区别普通应用程序的代码和异常服务例程的代码——包括中断服务例程的代码。
- 特权分级:特权级和用户级。这可以提供一种存储器访问的保护机制,使得普通的用户程序代码不能意外地,甚至是恶意地执行涉及到要害的操作。处理器支持两种特权级,这也是一个基本的安全模型。
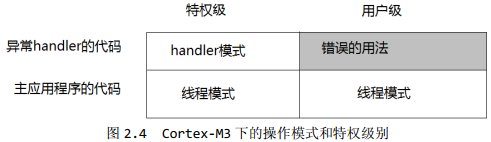
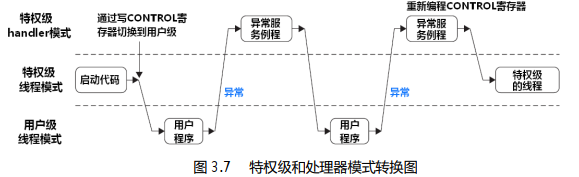
- 特权级和用户级区别:在 CM3 运行主应用程序时(线程模式),既可以使用特权级,也可以使用用户级;但是异常服务例程必须在特权级下执行。复位后,处理器默认进入线程模式,特权极访问。在特权级下,程序可以访问所有范围的存储器并且可以执行所有指令。
- 特权级和用户级切换:在特权级下的程序可以为所欲为,但也可能会把自己给玩进去——切换到用户级。一旦进入用户级,再想回来就得走“法律程序”了——用户级的程序不能简简单单地试图改写 CONTROL 寄存器就回到特权级,它必须先“申诉”:执行一条系统调用指令(SVC)。这会触发 SVC 异常,然后由异常服务例程(通常是操作系统的一部分)接管,如果批准了进入,则异常服务例程修改 CONTROL 寄存器,才能在用户级的线程模式下重新进入特权级。事实上,从用户级到特权级的唯一途径就是异常:如果在程序执行过程中触发了一个异常,处理器总是先切换入特权级, 并且在异常服务例程执行完毕退出时,返回先前的状态。
- 引入特权级和用户级目的:能够在硬件水平上限制某些不受信任的或者还没有调试好的程序,不让它们随便地配置涉及要害的寄存器,因而系统的可靠性得到了提高。
嵌套向量中断控制器
- 可嵌套中断支持
可嵌套中断支持的作用范围很广,覆盖了所有的外部中断和绝大多数系统异常。外在表现是,这些异常都可以被赋予不同的优先级。当前优先级被存储在 xPSR 的专用字段中。当一个异常发生时,硬件会自动比较该异常的优先级是否比当前的异常优先级更高。如果发现来了更高优先级的异常,处理器就会中断当前的中断服务例程(或者是普通程序),而服务新来的异常——即立即抢占。
- 向量中断支持
向量中断与直接中断的好处:当开始响应一个中断后, CM3 会自动定位一张向量表,并且根据中断号从表中找出 ISR 的入口地址,然后跳转过去执行。不需要像以前的 ARM 那样, 由软件来分辨到底是哪个中断发生了,也无需半导体厂商提供私有的中断控制器来完成这种工作。这么一来,中断延迟时间大为缩短。
- 中断延迟大大缩短
Cortex-M3 为了缩短中断延迟,引入了好几个新特性。包括自动的现场保护和恢复,以及其它的措施,用于缩短中断嵌套时的 ISR 间延迟。咬尾中断、晚到中断。
- 动态优先级调整支持
软件可以在运行时期更改中断的优先级。如果在某ISR中修改了自己所对应中断的优先级,而且这个中断又有新的实例处于悬起中(pending),也不会自己打断自己,从而没有重入(reentry) 风险。
- 中断可屏蔽
既可以屏蔽优先级低于某个阈值的中断/异常(设置BASEPRI寄存器),也可以全体封杀(设置PRIMASK和FAULTMASK寄存器)。这是为了让时间关键( time-critical)的任务能在死线 (deadline,或曰最后期限)到来前完成,而不被干扰。
存储器映射
待补充
总线接口
Cortex-M3 内部有若干个总线接口,以使 CM3 能同时取址和访内(访问内存),它们是:
- 指令和存储总线(两条)
- 系统总线
- 私有外设总线
- 指令和存储总线:有两条代码存储区总线负责对代码存储区的访问,分别是 I-Code 总线和 D-Code 总线。前者用于取指,后者用于查表等操作,它们按最佳执行速度进行优化。
- 系统总线:用于访问内存和外设,覆盖的区域包括 SRAM,片上外设,片外 RAM,片外扩展设备,以及系统级存储区的部分空间。
- 私有外设总线:负责一部分私有外设的访问,主要就是访问调试组件。它们也在系统级存储区。
存储器保护单元(MPU)
Cortex-M3 有一个可选的存储器保护单元。配上它之后,就可以对特权级访问和用户级访问分别施加不同的访问限制。当检测到犯规(violated)时, MPU 就会产生一个 fault 异常,可以由fault 异常的服务例程来分析该错误,并且在可能时改正它。
MPU 有很多玩法。最常见的就是由操作系统使用 MPU,以使特权级代码的数据,包括操作系统本身的数据不被其它用户程序弄坏。 MPU 在保护内存时是按区管理的(“区”的原文是 region,以后不再中译此名词——译注)。它可以把某些内存 region 设置成只读,从而避免了那里的内容意外被更改;还可以在多任务系统中把不同任务之间的数据区隔离。一句话,它会使嵌入式系统变得更加健壮,更加可靠(很多行业标准,尤其是航空的,就规定了必须使用 MPU 来行使保护职能——译注)。
指令集
- 32位的ARM指令集。对应处理器状态:ARM状态。
- 16位的Thumb指令集。对应处理器状态:Thumb状态,代码密度高,功能相对来说就少一些。
Thumb-2真不愧是一个突破性的指令集。它强大,它易用,它轻佻,它高效。Thumb-2是16位Thumb指令集的一个超集,在Thumb-2中, 16位指令首次与32位指令并存,结果在Thumb状态下可以做的事情一下子丰富了许多,同样工作需要的指令周期数也明显下降。 在支持了both 16位和32位指令之后,就无需烦心地把处理器状态在Thumb和ARM之间来回的切换了。
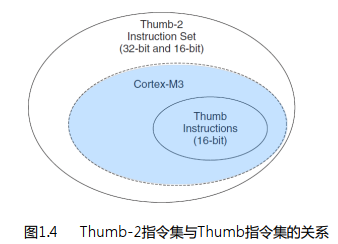
Cortex-M3 只使用Thumb-2指令集。这是个了不起的突破,因为它允许 32 位指令和 16 位指令水乳交融,代码密度与处理性能两手抓,两手都硬。而且虽然它很强大,却依然易于使用。注意:CM3 并不支持所有的Thumb-2 指令。
在过去,做 ARM 开发必须处理好两个状态。这两个状态是井水不犯河水的,它们是:32 位的ARM 状态和16 位的 Thumb 状态。当处理器在 ARM 状态下时,所有的指令均是 32 位的(哪怕只是个”NOP”指令),此时性能相当高。而在 Thumb 状态下,所有的指令均是16 位的,代码密度提高了一倍。不过,thumb 状态下的指令功能只是 ARM 下的一个子集,结果可能需要更多条的指令去完成相同的工作,导致处理性能下降。
为了取长补短,很多应用程序都混合使用 ARM 和 Thumb 代码段。然而,这种混合使用是有额外开销(overhead)的,时间上的和空间上的都有,主要发生在状态切换之时。另一方面, ARM 代码和 Thumb 代码需要以不同的方式编译,这也增加了软件开发管理的复杂度。
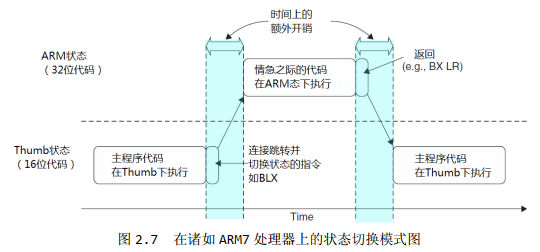
伴随着 Thumb-2 指令集的横空出世,终于可以在单一的操作模式下搞定所有处理了,再也没有来回切换的事来烦你了。 事实上, Cortex-M3 内核干脆都不支持 ARM 指令,中断也在 Thumb 态下处理(以前的 ARM 总是在 ARM 状态下处理所有的中断和异常)。这可不是小便宜,它使 CM3 在好几个方面都比传统的ARM处理器更先进:
- 消灭了状态切换的额外开销,节省了 both 执行时间和指令空间。
- 消除文件编译管理:不再需要把源代码文件分成按ARM编译的和按Thumb编译的,软件开发的管理大大减负。
- 无需再反复地求证和测试:究竟该在何时何地切换到何种状态下,我的程序才最有效率。开发软件容易多了。
调试支持
Cortex-M3 在内核水平上搭载了若干种调试相关的特性。最主要的就是程序执行控制,包括停机(halting)、单步执行(stepping)、指令断点、数据观察点、寄存器和存储器访问、性能速写(profiling)以及各种跟踪机制。
Cortex-M3 的调试系统基于ARM最新的 CoreSight 架构。不同于以往的 ARM 处理器,内核本身不再含有 JTAG 接口。取而代之的,是 CPU 提供称为“调试访问接口(DAP)”的总线接口。通过这个总线接口,可以访问芯片的寄存器,也可以访问系统存储器,甚至是在内核运行的时候访问!对此总线接口的使用,是由一个调试端口(DP)设备完成的。 调试端口DPs 不属于CM3内核,但它们是在芯片的内部实现的。目前可用的 DPs 包括 SWJ-DP(既支持传统的 JTAG 调试,也支持新的串行线调试协议),另一个 SW-DP 则去掉了对 JTAG 的支持。另外,也可以使用 ARM CoreSignt 产品家族的 JTAG-DP模块。这下就有 3 个 DPs 可以选了,芯片制造商可以从中选择一个,以提供具体的调试接口(通常都是选 SWJ-DP)。
此外, CM3 还能挂载一个所谓的“嵌入式跟踪宏单元(ETM)”。 ETM 可以不断地发出跟踪信息,这些信息通过一个被称为“跟踪端口接口单元(TPIU)”的模块而送到内核的外部,再在芯片外面使用一个“跟踪信息分析仪”,就可以把 TIPU 输出的“已执行指令信息”捕捉到,并且送给调试主机——也就是 PC。所有这些调试组件都可以由 DAP 总线接口来控制, CM3 内核提供 DAP 接口。此外,运行中的程序也能控制它们。所有的跟踪信息都能通过 TPIU 来访问到。
补充原理设计连接图
参考资料
本文章给出一些基本原理的讲解,可在官网查找更多原始资料信息
- ARM官方开发资料搜索M3:https://developer.arm.com/documentation#sort=relevancy
- 《ARM Cortex-M3权威指南》,作者:宋岩

 浙公网安备 33010602011771号
浙公网安备 33010602011771号