
点云配准经典算法ICP
自己理解
为了得到被测物体的完整数据模型,需要确定一个合适的坐标变换,将从各个视角得到的点集合并到一个统一的坐标系下,形成一个完整的数据点云,然后就可以方便地进行可视化等操作,这便是点云数据的配准.
方法:
主要是通过一定的算法或者统计学规律,利用计算机计算两块点云之间的错位,从而达到把两片点云自动配准的效果.
其实质是把在不同的坐标系中测量得到的数据点云进行坐标变换,以得到整体的数据模型。
称一对点云数据集的配准问题为两两配准问题,通常通过应用一个估计得到的表示平移和旋转的4x4刚体变换矩阵来使一个点云数据集精确地与另一个点云数据集(目标数据集)进行完美配准。
具体实现步骤如下:
(1)首先从两个数据集中按照同样的关键点选取标准,提取关键点。(注意:此处两个数据集的关键点提取方法需要相同)。
(2)对选择的所有关键点分别计算其特征描述子。
(3)结合特征描述子在两个数据集中的坐标的位置,以两者之间特征和位置的相似度为基础,来估算它们的对应关系,初步估计对应点对。
(4)假定数据是有噪声的,除去对配准有影响的错误的对应点对。
(5)利用剩余的正确对应关系来估算刚体变换,完成配准。
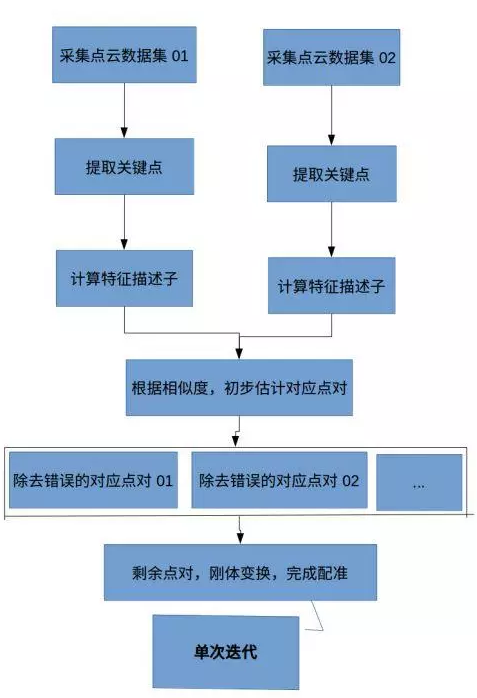
从上述整个流程可以看出,在整个配准过程中,关键点的提取与关键点的特征描述,影响着整个配准的准确性与效率。
