为了方便后面目标识别的处理,将投影求分类的函数嵌入进fft滤波函数中,共同组成fttmovedetect函数,利用python的切片功能实现投影
代码:
arryAllW[:] = arryAllW[:] + arryH[:]
arryAllH[:] = arryAllH[:] + arryL[:]
为在投影中分割多目标区域,引入两个变量:Yindexh 与Yindexl,用于记录分界点的个数,其中分界点由python中的卷积函数求出:
arryAllHH[0, :] = np.convolve(arryAllHH[0, :], conMask, mode='same') # numpy函数中的卷积函数库
arryAllHL[0, :] = np.convolve(arryAllHL[0, :], conMask, mode='same') # numpy函数中的卷积函数库
又引入两个数组:yArryh[:]与yArryl[:] 用于记录分界点的位置,分界点位置的判断由以下语句实现:
for a in range(1, int(High / SteppingH), 1):
if arryAllHH[0, a] > 0 and arryAllHH[0, (a - 1)] <= 0:
yArryh[0, Yindexh] = a
Yindexh = Yindexh + 1
if arryAllHH[0, a] <= 0 and arryAllHH[0, (a - 1)] > 0:
yArryh[0, Yindexh] = a - 1
Yindexh = Yindexh + 1
if arryAllHL[0, a] > 0 and arryAllHL[0, (a - 1)] <= 0:
yArryl[0, Yindexl] = a
Yindexl = Yindexl + 1
if arryAllHL[0, a] <= 0 and arryAllHL[0, (a - 1)] > 0:
yArryl[0, Yindexl] = a - 1
Yindexl = Yindexl + 1
接下来根据得到的分界点的数量与位置对运动图像进行分割:
for b in range(0, Yindexl, 2):
frameshow = cv2.rectangle(frameshow, (xArryl[0,i]*SteppingW, yArryl[0,b]*SteppingH) , (xArryl[0, i+1]*SteppingW, yArryl[0,b+1]*SteppingH), (200, 10, 140), 6)
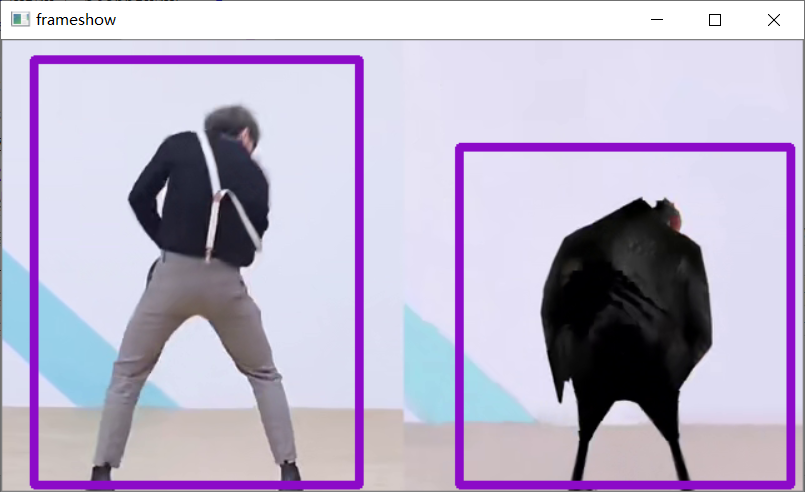
多目标检测完成,效果如图:
![]()

 浙公网安备 33010602011771号
浙公网安备 33010602011771号