

什么是LIN总线? CAN和LIN的区别
什么是LIN总线? CAN和LIN的区别-电子发烧友网 (elecfans.com)
描述
什么是LIN总线?
有了CAN为什么还会有LIN,CAN和LIN的区别,LIN的优势在哪?
一些关于LIN总线基础的内容,把其中的关键点提取了出来,在这里分享给大家。在这里你可能要问“不都有CAN总线了吗?这个LIN总线又是从哪里来的?”其实理由很简单,就是CAN总线太贵啦!处处都用CAN总线的话,那整车的总线架构成本将会变得很高!在一些比如车身电子配件的地方(如车窗、后视镜、大灯、车锁等),我们不需要报文像CAN总线上传输的那样“高速”!各大厂商一拍脑门就研究了这个LIN总线!本文关注点:有了CAN为什么还会有LIN,CAN和LIN的区别,LIN的优势在哪?
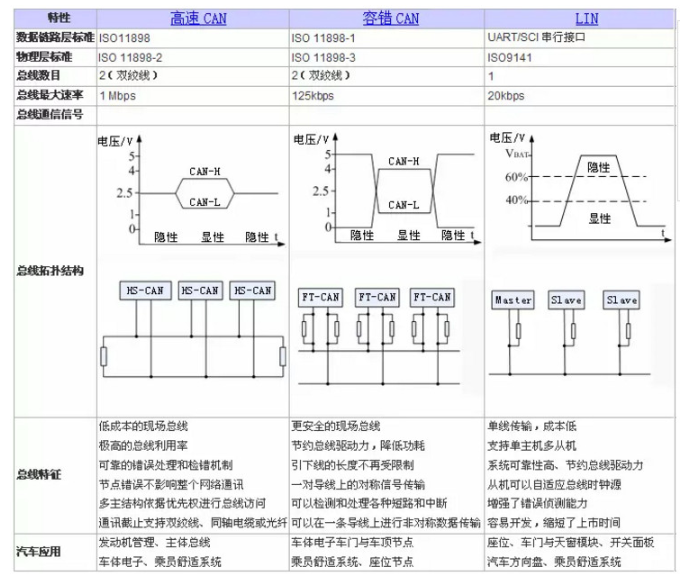
1. 什么是LIN总线?LIN(Local Interconnect Network)总线是基于UART/SCI(通用异步收发器/串行接口)的低成本串行通讯协议。其目标定位于车身网络模块节点间的低端通信,主要用于智能传感器和执行器的串行通信,而这正是CAN总线的带宽和功能所不要求的部分。
2. CAN/LIN总线区别由于LIN网络在汽车中一般不独立存在,通常会与上层CAN网络相连,形成CAN-LIN网关节点。

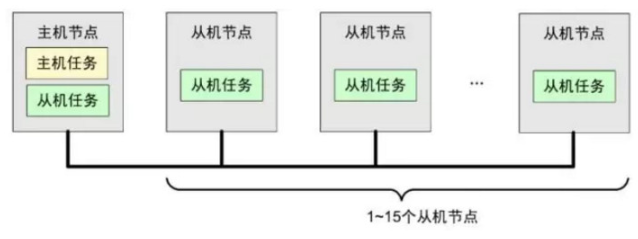
2.1.LIN总线的主从关系LIN总线采用的是单线传输形式,应用了单主机多从机(有无主动上报的支持?)的概念,总线电平一般为12V,传输速率最高限制为20kbps。由于物理层的限制,一个LIN网络最多可以连接16个节点。
总线任务负责:
调度总线上帧的传输次序
监测数据,处理错误
作为标准时钟参考(不是异步通信?)
接收从机节点发出的总线唤醒命令
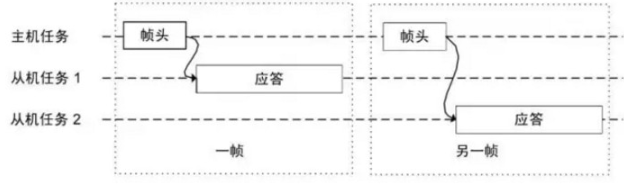
从机任务不能直接向总线发送数据,需要接受到主节点发送的帧头后,根据帧头所包含的信息来判断:
发送应答
接收应答
既不接收也不应答
LIN的特点
网络由一个主节点与若干个从节点构成
使用LIN总线可以大幅度削减成本(CAN和Lin都需要收发器,但是Lin属于单线制在线束上节省)
传输具有确定性,传播时间可以提前计算
LIN具有可预测的EMC(电磁兼容性)性能,为了限制EMC的强度,LIN协议规定最大传输速率为20kbps
LIN总线提供信号的配置、处理、识别和诊断功能(这些都是UART不具备的,可LIN是怎么实现的呢?)
3.LIN报文帧结构LIN报文帧包括帧头(hearder)与应答(response)两部分。主机负责发送至帧头;从机负责接收帧头并作出解析,然后决定是发送应答,还是接收应答或不回复。
(主机)帧头结构包括同步间隔段、同步段、PID段(受保护ID)段,应答部分包括数据段与效验和段。其中值“0”为显性电平、“1”为隐性电平,这点与CAN总线相类似。在总线上实行“线-与”:当总线有至少一个节点发送显性电平时,总线呈现显性电平;所有节点均发送隐性电平或者不发送信息时,总线呈隐性电平,即显性电平起着主导作用。

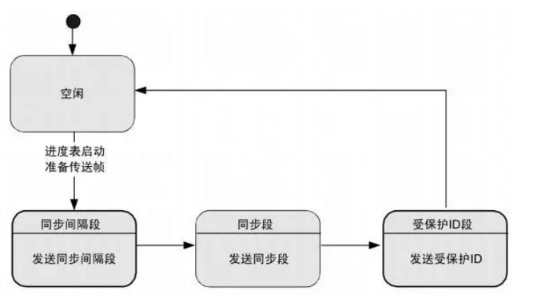
3.1.1.同步间隔段同步间隔段至少是由13位的显性电平组成,由于帧中的所有间隙或者总线空闲时总线均保持隐性电平状态。所以同步间隔段可以标志一个帧的开始。其中同步间隔段的间隔符至少为1位隐性电平。

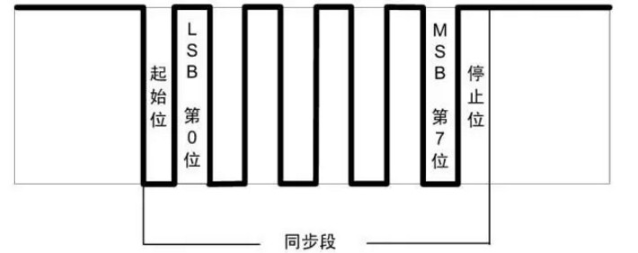
3.1.2.同步段LIN同步以下降沿为判断标志,采用字节0x55(01010101b)进行同步。在从机节点上可以不采用高精度的时钟,由此带来的偏差,需要通过同步段来进行调整。
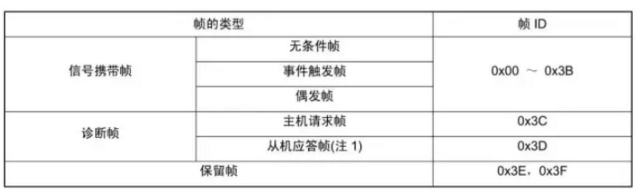
3.1.3.PID段受保护的ID的前6位叫做帧ID,加上两个奇偶效验码后称作受保护的ID。帧ID的取值范围为0x00~0x3f总共64个,帧ID标识了帧的类别和目的地。从机任务会根据帧头ID作出反应(接收/发送/忽略应答)。其中P0与P1效验如下:
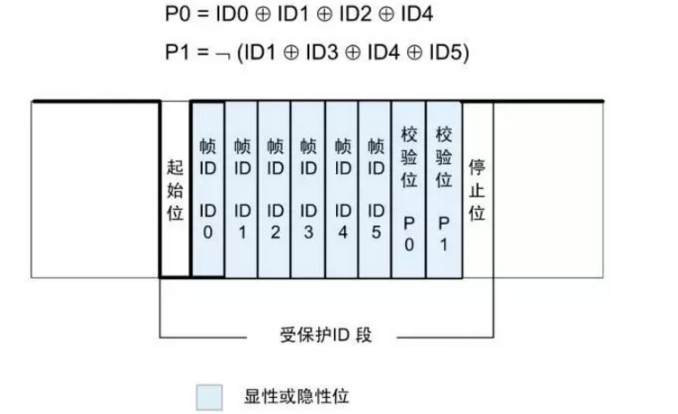
LIN总线根据帧ID号的不同,把报文分为信号携带帧、诊断帧、保留帧。
PS:从机应答帧是一个完整的帧,与(主节点)帧结构中的“应答”不同!
3.1.4.数据段数据段可以包含1-8个字节,其中包含有两种数据类型,信号(singal)和诊断消息(diagnostic messages)。信号由信号携带帧传递,诊断消息由诊断帧传递。
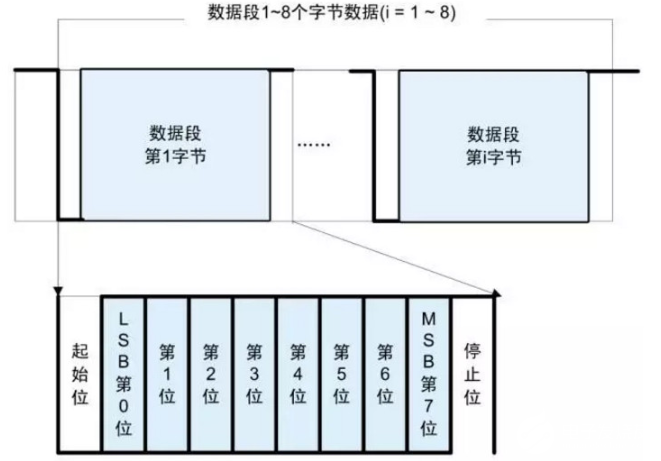
协议中并没有规定哪一部分显示数据长度码的信息(这点与CAN总线不同),数据的内容与长度均是由系统设计者根据帧ID事先约定好的。
总线上的数据是以广播形式发出,任何节点均可以收到,但并非对每个节点有用(与CAN相同)。具体到发布与接听是由哪个节点进行完成这个取决于应用层的软件配置,一般情况下,对于一个帧中的应答,总线上只存在一个发布节点,否则就会出现错误。事件触发帧例外,可能出现0,1,多个发布节点。
3.1.5.效验和段

效验和段是为了对帧传输内容进行效验。效验分为标准型效验与增强型效验。采用标准型还是增强型是由主机节点管理,发布节点和收听节点根据帧ID来判断采用哪种效验和。

4.LIN总线波形
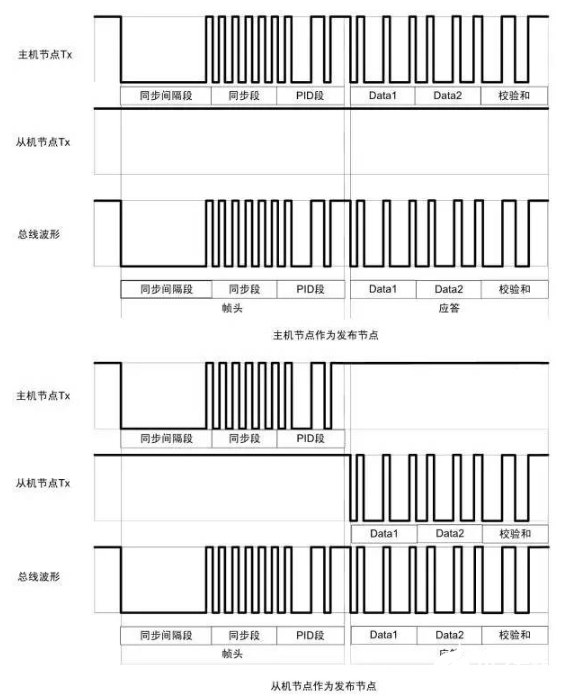
5.LIN总线的通讯上图展示的是LIN总线的通讯方式,可以看出无论什么时候帧头总是由主机节点发布,当主机节点想发布数据时,整个帧全部由主机节点发送。当从机节点想发布数据时,帧头部分由主机节点发布,应答部分由从机节点发布(主机怎么知道从机节点想发布数据,那肯定是主机节点无数据可发,故只发了帧头?),这样其余节点都能收到一个完整的报文帧。可以很直接的观察到,LIN总线的通讯都是由主机节点发起的,只要合理的规定要每个节点的配置,这样就不会存在总线冲突的情况(事件触发帧冲突时采用采用冲突解决进度表)。
帧类型
5.1.无条件帧无条件帧是具有单一发布节点的,无论信号是否发生变化,帧头均会被无条件应答的帧。

如上图中帧ID=0x30应答部分的发布节点为从机节点1,收听节点为主机节点,应用在从机节点向主机节点报告自身状态;帧ID=0x31中,应答部分为主机节点,收听部分为从机节点,应用在主机节点向从机节点发送消息;帧ID=0x32中应答部分的发送节点为从机节点2,收听节点为从机节点1,应用与从机节点之间的通信。
5.2.事件触发帧事件触发帧是主机节点在一个帧间隙中查询各从机节点的信号是否发生变化时使用的帧。当存在多个发布节点时,通过冲突解决进度表来解决冲突。
当从机节点信号发生变化的频率较低的时候,主机任务一次次地查询各个节点信息会占用一定的带宽。为了减小带宽的占用,引入了事件触发帧的概念。其主要原理就是:当从机节点信息状态没有发生变化的时候,从机节点可以不应答主机发出的帧头;当有多个节点信息同时发生变化的时候,同时应答事件触发帧头会造成总线的冲突。当主机节点检测到冲突时,便会查询冲突解决进度表来依次向各个节点发送无条件帧(无条件帧只有能1个节点应答)来确定从机节点的信息状态。
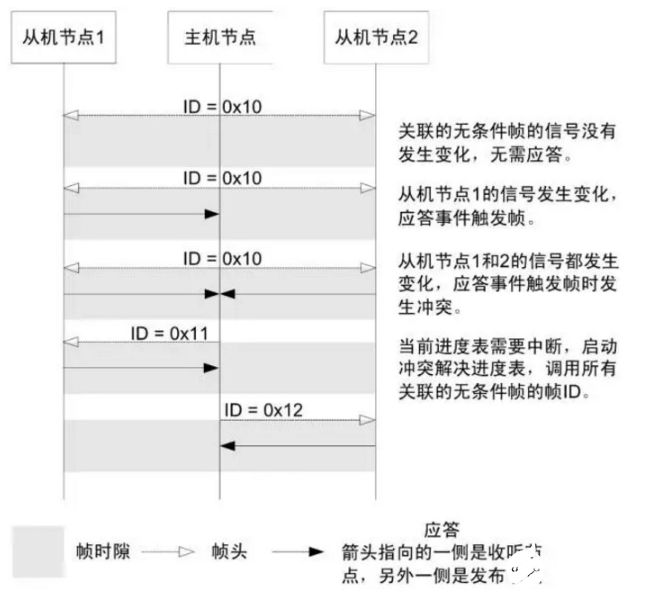
与事件触发帧关联的多个无条件帧需要满足以下5个条件:
数据段所包含的数据字节数等长 使用相同的效验与类型 数据段的第一个字节为该无条件帧的受保护ID,这样才能够知道应答是哪个关联的无条件帧发送出来的 由不同的从机节点发布 不能与时间触发帧处于同一个进度表中
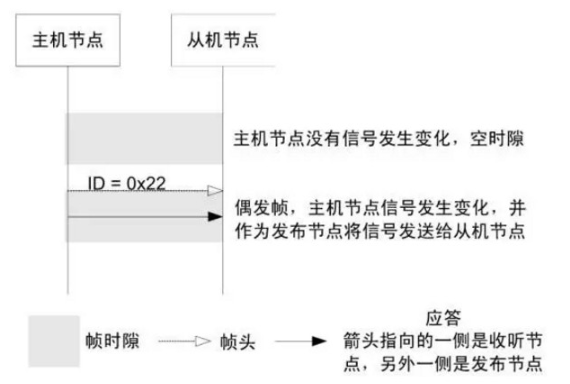
5.2.1.偶发帧偶发帧是主机节点在同一帧时隙中当自身信号发生变化时向总线启动发送的帧。当存在多个关联的应答信号变化时,通过预先设定的的优先级来仲裁。与事件触发帧类似,偶发帧也定义了一组无条件帧。规定偶发帧只有由主机节点发布。
偶发帧的传输可能出现三种情况:
当关联的无条件帧没有信号发生变化,这是主机连帧头也不需要发送。
当关联的一个无条件帧信号发生变化则发送该帧。
当有多个无条件帧发生信号变化时,则按照事先规定要的优先级依次发送。
5.2.2.诊断帧诊断帧包括主机请求帧和从机应答帧,主要用于配置、识别和诊断。主机请求帧ID=0x3c,应答部分的发布节点为主机节点;从机应答帧ID=0x3d,应答部分的发布节点为从机节点。数据段规定为8个字节,一律采用标准效验和。
5.2.3.保留帧保留帧的ID=0x3e与0x3f,为将来扩张需求用。
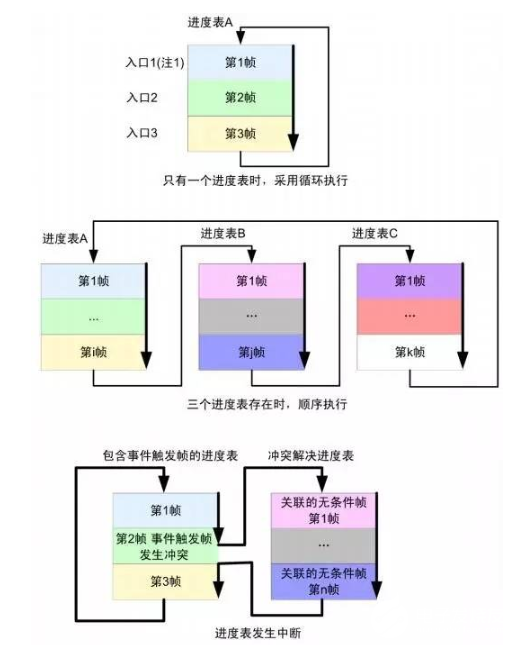
5.3.进度表进度表是帧的调度表,规定了总线上帧的传输次序以及传输时间。进度表位于主机节点,主机任务根据应用程需要进行调度。进度表可以有多个,一般情况下,轮到某个进度表执行的时候,从该进度表的入口处开始执行,到进度表的最后一个帧时,如果没有新的进度表启动则返回到当前进度表的第一个帧开始执行;也有可能在执行到某个进度表时发生中断,跳到另一个进度表后再返回,如事件触发帧就是一个典型的例子。
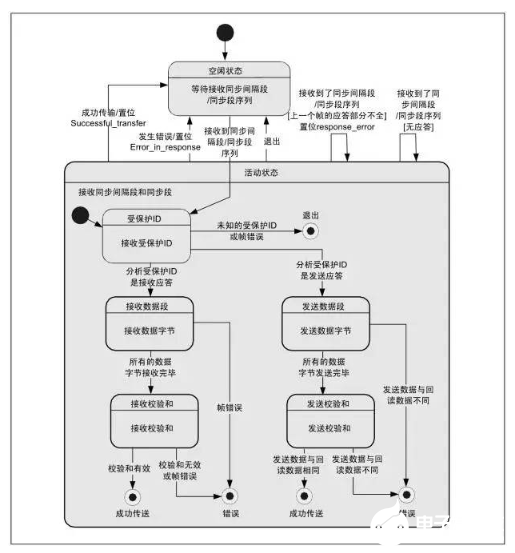
6.状态机的实现6.1.主机状态机
6.2.从机状态机从机任务负责发布或者接听帧的应答状态,包括连两个状态机:同步间隔段与同步段检查器、帧处理器。
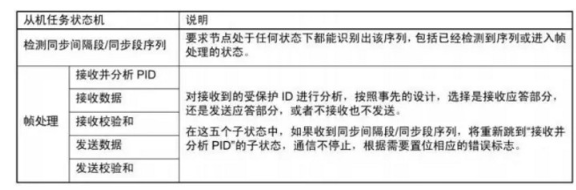
6.3.从机任务状态机
白话 LIN总线
总线原理:
物理上就一根线,关联节点都接上,有且仅有一个主设备,N多从设备,每个节点要通信的内容都事先编号号。
这就好比大家开晚会,话筒就一个,主持人一个,N个嘉宾,每人的话题都有一个编号。
表达顺序是这样的,
晚会开始前,大家睡觉的睡觉,闲的闲
1 主持人,把话筒对着大鼓,敲-停-, 敲-停-, … 敲-停-
这样大家都被吵醒了,晚会开始了
晚会都是谈话内容,都是下面步骤的重复
t1 主持人把话筒同音闭了一会,--LIN总线的Break
t2 主持人试了试话题,呼呼呼呼--LIN总线的同期
t3 主持人说,下面是由 PID编号的人讲话--LIN总线的PID
t4 有PID的人,就开始说了 D0,D1,D2,D3,D4,D5,D6,D7 --LIN总线的数据
t5 有PID的人,接着说了就这样了--LIN总线的 CRC
就这样重复了多次之后,主持人
e1 主持人把话筒同音闭了一会,--LIN总线的Break
e2 主持人试了试话题,呼呼呼呼--LIN总线的同期
e3 主持人说,下面是由 PID编号是睡眠的人讲话(就他自己)--LIN总线的PID
e4 有PID的人,就开始说了 Go to sleep --LIN总线的数据,最多8个Byte
e5 有PID的人,接着说了就这样了--LIN总线的 CRC
就这样,晚会结束了,大家睡觉的睡觉 休息的休息
搞笑的结束了,稍微来点关键词
。 物理上就一根线,多节点送信,又没有冲突检测,怎么办,主设备调度啊
。 速度怎么样,和CAN相比,十几kbps不算高,不过连接上的设备就那么大信息量,正好啦
。 价额怎么样,便宜啊,一个物理tranceiver,一个带UART的CPU,再来的点软件,搞定了
。 安全系数怎么样,PID带校验,数据带CRC校验,能发现错误,报告
。 扩展性怎么样,用两个特定的PID,做数据链路层,创送上层的大包TP层,
TP层上面在支持个诊断功能,能做些其他事情了
。 各版本兼容性怎么样,主设备版本高,就能管理协调好
反之,从设备版本高,有些浪费


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· winform 绘制太阳,地球,月球 运作规律
· 震惊!C++程序真的从main开始吗?99%的程序员都答错了
· AI与.NET技术实操系列(五):向量存储与相似性搜索在 .NET 中的实现
· 【硬核科普】Trae如何「偷看」你的代码?零基础破解AI编程运行原理
· 超详细:普通电脑也行Windows部署deepseek R1训练数据并当服务器共享给他人
2021-08-10 QCefView实现与JS的交互
2018-08-10 win10企业版永久激活方法
2017-08-10 sqlserver 获取存储过程执行时间