


ROS下串口通信
原理与结构
我们需要在ROS下写一个串口节点,该节点订阅talker控制节点发来的命令主题,将命令通过串口设备发送到移动底座;同时串口节点实时接收移动底座通过串口发送过来的传感器实时数据,并将该数据封装后以 sensor (常是imu)主题的模式进行发布, listenner 节点可以实现订阅该主题。这样就实现了 ROS 与移动底座的串口通信过程。
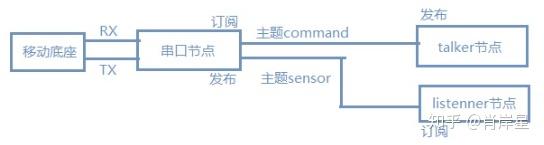 P2.通信原理图
P2.通信原理图
ROS下的serial包
mkdir -p ~/catkin_ws/src/my_serial/
cd ~/catkin_ws/src/my_serial/
git clone https://github.com/wjwwood/serial.git再下载我写好的代码
git clone https://github.com/threefruits/ros_serial_code.git
cd ~/catkin_ws
catkin_make
下面是cpp代码原码与注释
#include <ros/ros.h>
#include <serial/serial.h>
#include <std_msgs/String.h>
#include <std_msgs/Empty.h>
#include <geometry_msgs/Twist.h>
serial::Serial ros_ser;
#define sBUFFERSIZE 10//send buffer size 串口发送缓存长度
unsigned char s_buffer[sBUFFERSIZE];//发送缓存
int l_v=0;
int r_v=0;
int l_d=1;
int r_d=1;
const float d_between=0.165;//半轮间距
const float d=0.125;//轮子半径
typedef union{
unsigned char cvalue[4];
int ivalue;
}int_union;
void cmd_to_serial(const geometry_msgs::Twist msg)
{
r_v=27*(msg.linear.x + msg.angular.z * d_between)/(3.1416*d);
l_v=27*(msg.linear.x - msg.angular.z * d_between)/(3.1416*d);
if(r_v>=0)
{
r_d=0;
r_v=r_v;
} //电机正转
else
{
r_d=1;
r_v=-r_v;
} //电机反转
if(l_v>=0)
{
l_d=0;
l_v=l_v;
}
else
{
l_d=1;
l_v=-l_v;
}
}
void data_to_serial(const int left, const int right, const int left_d, const int right_d)
{
int_union left_v,right_v,left_v_d,right_v_d;
left_v.ivalue=left;
right_v.ivalue=right;
memset(s_buffer,0,sizeof(s_buffer));
s_buffer[0]=0xff;
s_buffer[1]=0xfe;
s_buffer[2]=left_v.cvalue[0];
s_buffer[3]=right_v.cvalue[0];
left_v_d.ivalue=left_d;
right_v_d.ivalue=right_d;
s_buffer[4]=left_v_d.cvalue[0];
s_buffer[5]=right_v_d.cvalue[0];
s_buffer[6]=0x00;
s_buffer[7]=0x00;
s_buffer[8]=0x00;
s_buffer[9]=0x00;
ros_ser.write(s_buffer,sBUFFERSIZE);
}
//回调函数
void callback(const geometry_msgs::Twist& msg){
cmd_to_serial(msg);
data_to_serial(l_v,r_v,l_d,r_d);
}
int main (int argc, char** argv){
ros::init(argc, argv, "my_serial_node");
ros::NodeHandle n;
//订阅主题command
ros::Subscriber command_sub = n.subscribe("/cmd_vel", 1000, callback);
//发布主题sensor
ros::Publisher sensor_pub = n.advertise<std_msgs::String>("sensor", 1000);
try
{
ros_ser.setPort("/dev/ttyUSB0");
ros_ser.setBaudrate(115200);
serial::Timeout to = serial::Timeout::simpleTimeout(1000);
ros_ser.setTimeout(to);
ros_ser.open();
}
catch (serial::IOException& e)
{
ROS_ERROR_STREAM("Unable to open port ");
return -1;
}
if(ros_ser.isOpen()){
ROS_INFO_STREAM("Serial Port opened");
}else{
return -1;
}
ros::Rate loop_rate(10);
while(ros::ok()){
ros::spinOnce();
if(ros_ser.available()){
ROS_INFO_STREAM("Reading from serial port");
std_msgs::String serial_data;
//获取串口数据
serial_data.data = ros_ser.read(ros_ser.available());
ROS_INFO_STREAM("Read: " << serial_data.data);
//将串口数据发布到主题sensor
sensor_pub.publish(serial_data);
}
loop_rate.sleep();
}
}


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 开源Multi-agent AI智能体框架aevatar.ai,欢迎大家贡献代码
· Manus重磅发布:全球首款通用AI代理技术深度解析与实战指南
· 被坑几百块钱后,我竟然真的恢复了删除的微信聊天记录!
· 没有Manus邀请码?试试免邀请码的MGX或者开源的OpenManus吧
· 园子的第一款AI主题卫衣上架——"HELLO! HOW CAN I ASSIST YOU TODAY
2017-01-11 mysql 导出导入数据 -csv
2017-01-11 Linux ifconfig 单网卡配置多网段