costmap_2d 解析
costmap_2d这个包提供了一种2D代价地图的实现方案,该方案利用输入的传感器数据,构建数据2D或者3D代价地图(取决于是否使用基于voxel的实现),并根据占用网格和用户定义的膨胀半径计算2D代价地图的代价。 此外,该包也支持利用map_server初始化代价地图,支持滚动窗口的代价地图,支持参数化订阅和传感器主题的配置。
1、概述

注:红色代表代价地图中的障碍物,蓝色代表的是通过机器人内切圆半径计算的障碍物膨胀,红色的多边形代表机器人外壳。为了使机器人不碰到障碍物,机器人的外壳绝对不允许与红色单元相交,机器人的中心绝对不允许与蓝色单元相交。
costmap_2d包提供了一个可配置的结构,以网格占有的形式保存机器人在该处网格的导航信息。该包使用静态地图的传感器数据与信息,通过 costmap_2d::Costmap2DROS 来储存和升级世界中的障碍物信息。The costmap_2d::Costmap2DROS对象为用户提供了一个纯粹的二维界面,这意味着对障碍物的查询只能在列中进行,例如,在XY平面上位于同一位置的桌子和鞋,虽然在Z方向上有差异但是它们在costmap_2d::Costmap2DROS对象代价地图中对应的cell上拥有相同的代价值。 这种设计对平面空间进行路径规划是有帮助的。
从Hydro发布版本开始, 用来写数据到代价地图的底层方法已经完全可配置了。 每种功能放置一层中。 例如,静态地图是一层,障碍物是另一层。 缺省情况下,障碍物层维护的是3D信息,3D障碍物数据可以让层更加灵活的标记和清除障碍物。该包提供的ROS化功能接口主要就是costmap_2d::Costmap2DROS,它使用costmap_2d::LayeredCostmap 来跟踪每一层。 每一层在Costmap2DROS中以插件方式被实例化,并被添加到LayeredCostmap。 每一层可以独立编译,且可使用C++接口实现对代价地图的随意修改。costmap_2d::Costmap2D 类中实现了用来存储和访问2D代价地图的的基本数据结构。关于代价地图如何更新占用珊格的细节将在下面介绍,同时提供了页面链接供查看某一层具体如何工作。
2、障碍物清楚与占有(clearing and mark)
代价地图自动订阅传感器发布的主题并基于数据进行相应自我更新。 对每个传感器来说,其可以用来执行mark(将障碍物信息插入到代价地图),也可以用来执行clear(从代价地图移除障碍物)或者二者都执行。marking操作就是索引到数组内修改cell的代价。然而对于clearing操作,每次观测报告都需要传感器源向被观测对象发射线。 如果存储的障碍物信息是3D的,需要将每一列的障碍物信息投影成2D后才能放入到代价地图。
3、空间状态(占有、自由、未知)
虽然代价地图中每个cell可用255个不同值中任何一个值(see the inflation section),可是下层数据结构仅需要3个值。 具体来说在这种下层结构中,每个cell仅需要3个值来表示cell的3种状态:free,occupied,unknown。 当投影到代价地图时候,每种状态被赋一个特定的代价值。 如果列有一定量的占用(see mark_threshold parameter) 就被赋代价值costmap_2d::LETHAL_OBSTACLE, 如果列有一定量的unknown cells (see unknown_threshold parameter) 就被赋代价值costmap_2d::NO_INFORMATION, 剩余其它列赋代价值为costmap_2d::FREE_SPACE。
4、地图更新
代价地图以参数update_frequency 指定的周期进行地图更新。每个周期传感器数据进来后,都要在代价地图底层占用结构上执行标记和清除障碍操作,并且这种结构会被投影到代价地图附上相应代价值。 这完成之后,对代价赋值为costmap_2d::LETHAL_OBSTACLE的每个cell执行障碍物的膨胀操作,即从每个占用cell向外传播代价值,直到用户定义的膨胀半径为止。细节如下6.
5、tf
为了把来自传感器源的数据插入到代价地图,costmap_2d::Costmap2DROS要大量使用tf。所有tf转换由global_frame parameter,the robot_base_frame parameter,以及sensor sources建立联系和更新。The transform_tolerance parameter定义了tf转换所能容忍的的最大延时。如果 tf 树没有以期望速度被更新,那么导航功能包集将会让机器人停止。
Inflation is the process of propagating cost values out from occupied cells that decrease with distance. For this purpose, we define 5 specific symbols for costmap values as they relate to a robot.
膨胀是由被占有的栅格(occupied cells )向外传播其代价值的过程,传播的值随距离增加而递减。为了实现该目的,定义了五个与机器人相关联的特殊符号。
具体状态和值对应有下图:
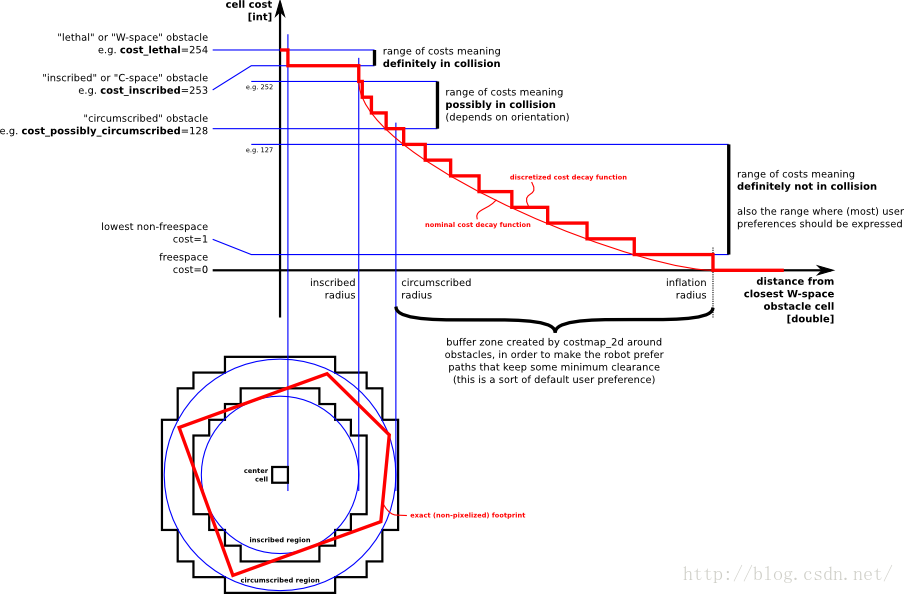
"Lethal" cost:意思是cell内有障碍物,因此如果机器人中心位于那个cell,很显然机器人会碰到障碍
"Inscribed" cost:意思是cell到障碍物的距离小于机器人内切圆半径。 因此如果机器人中心在cell(或者代价>=内切代价),机器人与障碍物肯定有冲突
"Possibly circumscribed"
cost:类似于内切,但是使用机器人外接圆作为截止距离。因此,如果机器人中心位于cell上(或者代价>=外接代价),那么它与障碍物是否冲突依赖于机器人方位。使用术语“可能”意思是这不一定是一个真正障碍cell,但是有些用户喜欢放特定的代价值进去为特定目的。
例如,如果用户要表示机器人应该尝试避开建筑物某特定区域,
它们可以在代价地图上为那个与任何障碍毫无关系的区域(该区域本来就不是障碍区)插入代价值。注意,虽然上图示例中使用了代价值128,但是实际由于代价值受内切圆半径和外接圆半径的影响,真正实际值并不一定是128。
"Freespace" cost: 假定为0,意思是没啥东西会阻碍机器人到那里
"Unknown" cost:意思是cell上没有信息
All other costs: 被赋值为"Freespace"和"Possibly circumscribed"之间的一个值,取决于到 "Lethal" cell的距离以及用户定义的衰减函数
作者:白菜菜白
出处:http://www.cnblogs.com/lvchaoshun/
本文版权归作者和博客园共有,欢迎转载,但未经作者同意必须保留此段声明,且在文章页面明显位置给出原文连接,否则保留追究法律责任的权利。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号