


unity3d:Matrix4x4矩阵位移,缩放,旋转
二维坐标轴旋转公式推导
https://www.cnblogs.com/fangsmile/p/8622421.html

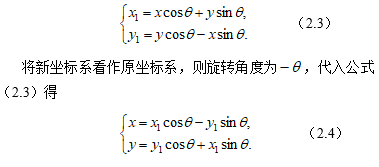
设点M在原坐标系中的坐标为(x,y),对应向量的模为r,幅角为α.将坐标轴绕坐标原点,按照逆时针方向旋转角θ形成新坐标系,点M在新坐标系中的坐标为(如图2-4),则
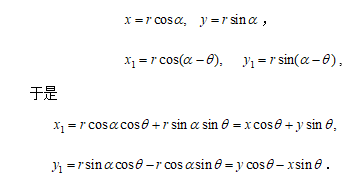
由此得到坐标轴的旋转的坐标变换公式
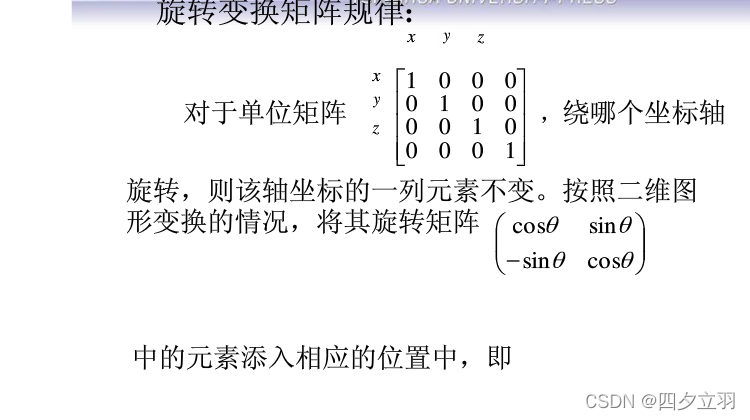
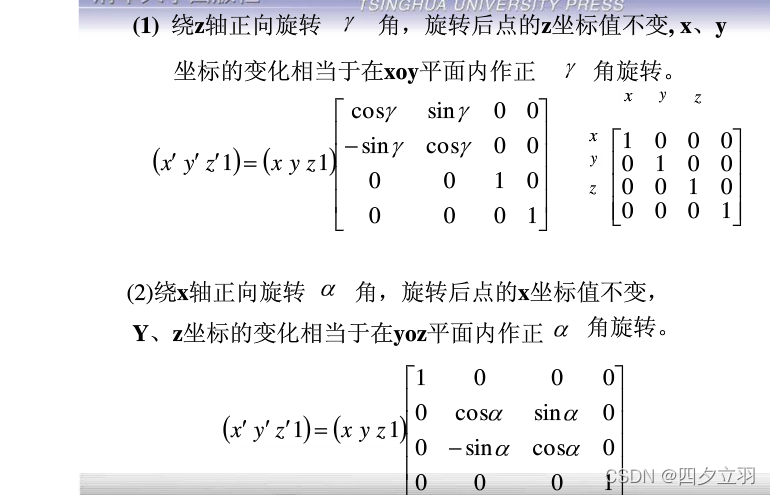
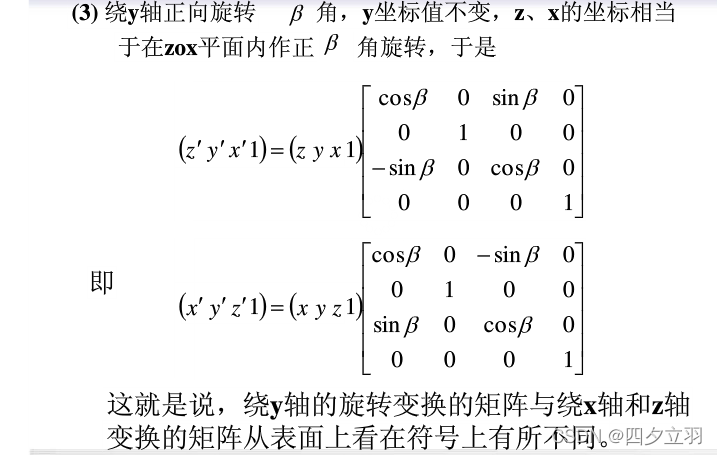
矩阵旋转公式推导
https://www.cnblogs.com/wywnet/p/3585075.html
Matrix4x4矩阵
https://www.cnblogs.com/jiahuafu/p/5981578.html
矩阵也是3D图形学一个重要的概念,在D3D里用的很平凡,但是U3D里好像都已经封装到各个Object上去了,所以很容易忽视掉,但不能忽视它的存在。在3D世界里,每个物体均有自身的世界矩阵,摄像机有摄像机矩阵,投影场景有projection矩阵,对顶点、向量、物体实施各种平移、旋转、缩放都是通过矩阵来完成的。计算机3D物体的标准4×4矩阵是这样定义的:(表示不出来矩阵大括号,请读者就当左4行的[和右4行的]当成一对大括号)
Transform:
这个就是U3D所封装的矩阵运算了,用于缩放,平移,还有定位(这个囧,他把矩阵给放这用了,所有物体都可以用transform类型来存放)。Transform所实现的功能不过就是物体矩阵的运算罢了,具体如下:
Matrix4x4中,是按列优先填充的。m12就是第一行二列,下标从0开始
//
// 摘要:
// A standard 4x4 transformation matrix.
[DefaultMember(“Item”)]
[NativeClass(“Matrix4x4f”)]
[NativeHeader(“Runtime/Math/MathScripting.h”)]
[NativeType(Header = “Runtime/Math/Matrix4x4.h”)]
[RequiredByNativeCode(Optional = true, GenerateProxy = true)]
[ThreadAndSerializationSafe]
public struct Matrix4x4 : IEquatable
{
[NativeName(“m_Data[0]”)]
public float m00;
[NativeName(“m_Data[15]”)]
public float m33;
[NativeName(“m_Data[14]”)]
public float m23;
[NativeName(“m_Data[13]”)]
public float m13;
[NativeName(“m_Data[12]”)]
public float m03;
Matrix4x4.identity 单位矩阵
这个矩阵在使用的时不会影响任何东西。它的主对角线上全是1,其他位置全是0。
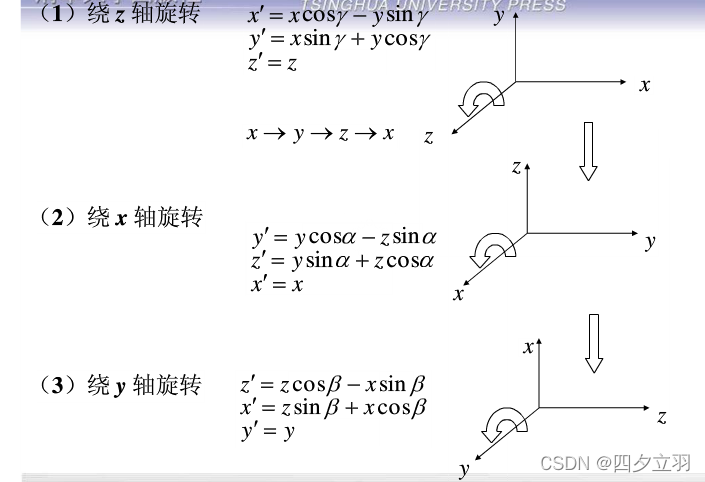
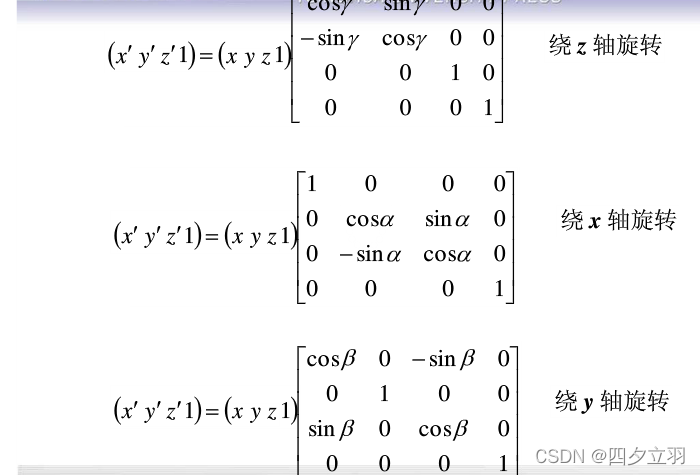
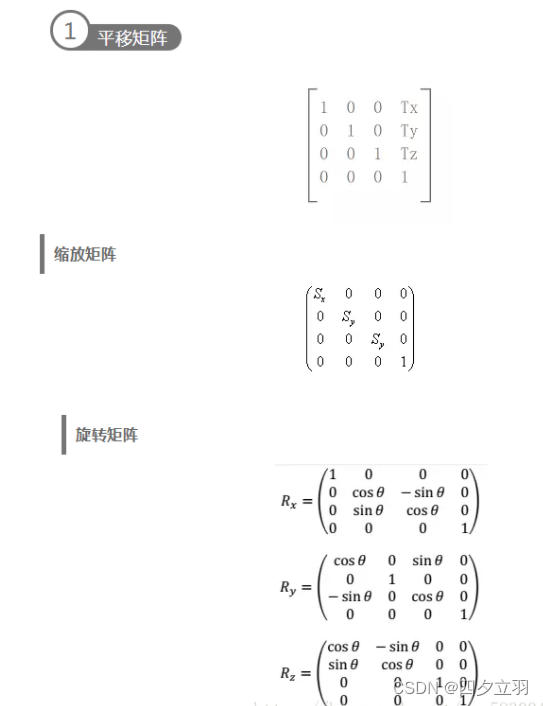
矩阵旋转
public static void Matrix4x4_Rotation(this Transform transform, SelfAxle axle, float angle) { Matrix4x4 ori = Matrix4x4.zero; ori.SetTRS(transform.position, transform.rotation, Vector3.one); matrix = Matrix4x4.identity; if (axle == SelfAxle.X) { matrix.m11 = Mathf.Cos(angle * Mathf.Deg2Rad); matrix.m12 = -Mathf.Sin(angle * Mathf.Deg2Rad); matrix.m21 = Mathf.Sin(angle * Mathf.Deg2Rad); matrix.m22 = Mathf.Cos(angle * Mathf.Deg2Rad); } else if (axle == SelfAxle.Y) { matrix.m00 = Mathf.Cos(angle * Mathf.Deg2Rad); matrix.m02 = Mathf.Sin(angle * Mathf.Deg2Rad); matrix.m20 = -Mathf.Sin(angle * Mathf.Deg2Rad); matrix.m22 = Mathf.Cos(angle * Mathf.Deg2Rad); } else { matrix.m00 = Mathf.Cos(angle * Mathf.Deg2Rad); matrix.m01 = -Mathf.Sin(angle * Mathf.Deg2Rad); matrix.m10 = Mathf.Sin(angle * Mathf.Deg2Rad); matrix.m11 = Mathf.Cos(angle * Mathf.Deg2Rad); } matrix = matrix * ori; transform.rotation = matrix.GetRotation(); } public static Quaternion GetRotation(this Matrix4x4 matrix4X4) { float qw = Mathf.Sqrt(1f + matrix4X4.m00 + matrix4X4.m11 + matrix4X4.m22) / 2; float w = 4 * qw; float qx = (matrix4X4.m21 - matrix4X4.m12) / w; float qy = (matrix4X4.m02 - matrix4X4.m20) / w; float qz = (matrix4X4.m10 - matrix4X4.m01) / w; return new Quaternion(qx, qy, qz, qw); } //如何使用 transform.Matrix4x4_Rotation(SelfAxle.X, 46f);
源码
https://github.com/luoyikun/UnityForTest
MatrixTest场景

posted on 2021-12-16 01:35 luoyikun 阅读(131) 评论(0) 编辑 收藏 举报 来源

【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 无需6万激活码!GitHub神秘组织3小时极速复刻Manus,手把手教你使用OpenManus搭建本
· Manus爆火,是硬核还是营销?
· 终于写完轮子一部分:tcp代理 了,记录一下
· 别再用vector<bool>了!Google高级工程师:这可能是STL最大的设计失误
· 单元测试从入门到精通