
[论文总结] 深度学习在农业领域应用论文笔记8
深度学习在农业领域应用论文笔记8
Yield Estimation and Visualization Solution for Precision Agriculture,2021
通过使用对象检测和跟踪来计算视频中的水果。我们使用和训练你只看一次模型 (YOLO) 在苹果, 橙子和南瓜的视频剪辑.通过异议检测获得的边界框用作我们选定的跟踪模型 DeepSORT 的输入。DeepSORT 的原始版本无法与水果数据一起使用,因为外观特征提取器仅适用于人。我们实施 ResNet 作为深度 SORT 的新功能提取器,该提取器重量轻、准确且通用于不同水果上。我们的产量估计模块显示苹果树真实镜头的准确度在 91%到 95% 之间。我们的修改成功地用于计数橙子和南瓜,准确率为79%和93.9%,无需培训。我们的框架还包括产量的可视化。这是通过纳入地理空间数据来完成的。我们还提出了一个机制,以注释一组框架与各自的GPS坐标。在计数过程中,记录帧集内的计数和匹配的 GPS 坐标,然后在地图上可视化。我们利用这些信息提出最佳的容器放置解决方案。我们建议的解决方案包括根据一系列限制因素,最大限度地减少收获前在田间放置的容器数量。这是农民在收获前制定高效物流计划(如劳动力、设备和收集路径)的决策支持系统。我们的工作是未来农业决策支持系统的蓝图,可以帮助农业的许多其他方面。
总结:使用 YOLOv3 进行目标检测,并使用深度跟踪算法进行跟踪。修改了 DeepSORT,通过实施 ResNet18 来取代最初提议的 CNN。我不知道深度跟踪算法有什么用
Real Time Pear Fruit Detection and Counting Using YOLOv4 Models and Deep SORT,2021
本研究旨在仅使用 RGB 数据、最先进的目标检测模型 YOLOv4 的变种以及多个对象跟踪算法深度 SORT 为移动应用程序生成一个强大的实时梨果计数器。这项研究也为选择最合适的模式在农业科学中应用提供了系统和实用的方法。在准确性方面,YOLOv4-CSP被观察为最佳模型,AP@0.50为98%。在速度和计算成本方面,YOLOv4-tiny 被认为是理想的型号,其速度超过 50 FPS 和 FLOPS 为 6.8 至 14.5。如果从精度、速度和计算成本的角度考虑平衡,YOLOv4 被发现是最合适的,并且具有最高的精度指标,同时满足大于或等于 24 FPS 的实时速度。在深排序的两种计数方法之间,发现唯一的 ID 方法更可靠,F1 计数为 87.85%。这是因为YOLOv4在检测梨果时假阴性非常低。投资回报率线更可靠,因为它的限制性更严格,但由于在检测中闪烁,它不能计数一些梨,尽管他们被检测到。
总结:改进YOLOV4,和利用对象跟踪算法深度 SORT 为移动应用程序生成一个强大的实时梨果计数器。
Vision-Based Moving Obstacle Detection and Tracking in Paddy Field Using Improved Yolov3 and Deep SORT
在稻田里使用智能农业机械受到高度重视。随着农业机械的发展,需要一个避障系统。为了使机器更加智能,检测和跟踪障碍物,特别是稻田中的移动障碍物,是避免障碍物的基础。为了实现这一目标,使用红色、绿色和蓝色 (RGB) 摄像头和计算机构建安装在移植器上的机器视觉系统。一种将改进后的"你只看一次"版本(Yolov3)和深度简单在线和实时跟踪(深度排序)相结合的方法用于检测和跟踪典型的移动障碍物,并找出稻田障碍物的中心点位置。改进后的 Yolov3 仅具有 23 个残块和上采样一次,并具有新的损失计算功能。结果表明,改进后的Yolov3在稻田中自行创建的移动障碍物(人和水牛)测试数据集上获得平均交叉值比联盟(mIoU)得分0.779分,处理速度比标准Yolov3快27.3%。在满足实际工作需要的实际稻田测试中,可以获得可接受的检测和跟踪性能,平均处理速度为每秒 5 7 帧(FPS)。在未来的研究中,该系统可以支持智能农业机械在自主导航方面更加灵活。
总结:改进的YOLOV3,但有硬件,和大田实测数据
Waste management using an automatic sorting system for carrot fruit based on image processing technique and improved deep neural networks,2021,Energy Reports, IF=6.87
在这项研究中,我们解决了胡萝卜果的分类问题,以便利用改进的深神经网络管理和控制其废物。在这项工作中,我们对胡萝卜分类问题进行了深入的研究,并表明汇流神经网络是解决问题的直接方法。此外,我们通过将平均池和最大池相结合,在学习池功能的基础上改进了汇体神经网络 (CNN)。我们实验表明,与其他合并方法相比,采用的合并操作提高了胡萝卜分类的准确性。为此,拍摄了878个不同形状的胡萝卜样本(常规和不规则)的图像,在预处理操作后,它们被改进的深CNN分类。为了将此方法与其他方法进行比较,使用定向梯度直方图 (HOG) 和本地二进制模式(LBP) 方法提取图像特征,并按多层感知器 (MLP)、梯度增强树 (GBT) 和 K-最近邻居 (KNN) 算法进行分类。最后,根据改进的CNN算法提出的方法与其他分类算法进行了比较。结果显示,通过CNN对胡萝卜进行分级的准确率为99.43%,方法基于混合池配置了建议的批次规范化(BN)-CNN方法。因此,CNN可以有效地提高市场性,控制浪费,改进胡萝卜果的传统分级方法。
Deep learning in multi-object detection and tracking: state of the art,2021,Applied Intelligence, IF=5.086
综述论文
Real-Time Visual Localization of the Picking Points for a Ridge-Planting Strawberry Harvesting Robot
草莓收获机器人使用的主要技术威慑因素是收成率低,需要提高本地化算法的准确性和实时性能,以检测草莓茎上的采摘点。水果目标(水果轴方向)的姿势估计可以提高本地化算法的准确性。这项研究提出了一种新型的收获机器人的山脊种植草莓,以及一个水果姿势估计器称为旋转YORA(R-YOLO),这显著提高了采摘点的本地化精度。首先,利用轻量级网络Mobilnet-V1取代汇流神经网络作为功能提取的骨干网络。简化的网络结构大大提高了运行速度。第二,旋转角度参数α用于标记培训集和设置锚:使用旋转锚的物流回归预测目标水果边界箱的旋转。一组100张草莓图像的测试结果显示,拟建模型的平均识别率为94.43%,召回率为93.46%。在机器人的嵌入式控制器上每秒处理 18 帧 (FPS),展示了良好的实时性能。与水果收获机器人采用的其他几种目标检测方法相比,该模型在采摘点的实时检测和定位精度方面表现出较好的性能。现场试验结果表明,改良情况下收获成功率达到84.35%。这项研究的结果为改进收获机器人嵌入式控制器的目标检测提供了技术支持。
总结:作者设计了一种新型的收获机器人来种植草莓,并提出了R-YOLO模型(没有和YOLOV3,V4,V5做比较)用于检测草莓在自动收获中的姿势。有自己数据集,但不多,有机器人硬件。
Visual Trunk Detection Using Transfer Learning and a Deep Learning-Based Coprocessor
一些农业环境对机器人的可操作性提出了苛刻的条件。在陡坡葡萄园中,存在若干挑战:地形不规则、照明特征以及全球导航卫星系统(GNSS)发出的信号不准确/不可用。在这种情况下,机器人导航成为一项具有挑战性的任务。为了安全、准确地执行这些任务,从周围环境中提取可靠的特征或地标至关重要。这项工作旨在解决这个问题,在陡峭的斜坡葡萄园环境中进行准确、廉价和快速的地标性开采。为此,我们使用谷歌 USB 加速器提供的单个摄像头和 Edge Tensor 处理单元 (TPU) 作为适合图像分类、对象检测和语义分割的小型、高性能和低功耗单元。建议的方法使用基于深度学习 (DL) 的神经网络 (NN) 模型在此设备上执行对象检测,以检测藤树干。为了训练模型,传输学习 (TL) 用于移动网络 V1 和移动网络 V2 的几个预培训版本。执行两个模型和不同预培训版本之间的基准。这些模型在内部数据集中经过预先培训,该数据集可公开提供包含 336 张不同图像以及大约 1,600 个注释葡萄树干。有两个葡萄园,一个使用相机图像与传统的红外滤镜,其他与红外过滤器。结果表明,该配置允许快速藤树干检测,其中移动网V2是最精确的再培训检测器,总体平均精度为52.98%。我们简要地比较了建议的方法与 Jetson TX2 上运行的最先进的 Tiny YOLO-V3,显示了采用的系统在这项工作中的出色表现。
Online Sorting of the Film on Cotton Based on Deep Learning and Hyperspectral Imaging
在机器收获和加工过程中,木耳薄膜通常与棉花混合,从而降低棉花质量。本文提出了一种新型的分拣算法,利用光谱区为1000-2500纳米的光谱区域对棉花进行在线检测。排序算法由一组堆叠自动编码器、两个优化模块和一个极端学习机器 (ELM) 分类器组成。可变加权堆叠自动编码器 (VW-SAE) 用于从高光谱图像中提取功能,并应用了一个优化模块的人工神经网络 (ANN)来优化大众-SAE 的参数。然后,提取的功能是ELM中的输入,以分类四种类型的对象:背景,背景薄膜,棉花和棉花薄膜。ELM 由新的优化器(灰狼优化器)进行优化,可同时调整 ELM 的隐藏节点和参数。进行了一组实验,以评估由新疆某棉纺公司提供的棉花分类算法的性能。实验结果表明,大众-SAE可提高约15%的分类水平。建议算法的整体识别率超过 95%,其识别时间可与一些最先进的方法相媲美。
总结:这篇论文附上了一个棉花检查视频,值得一看,这是已经落地的项目的工作总结。
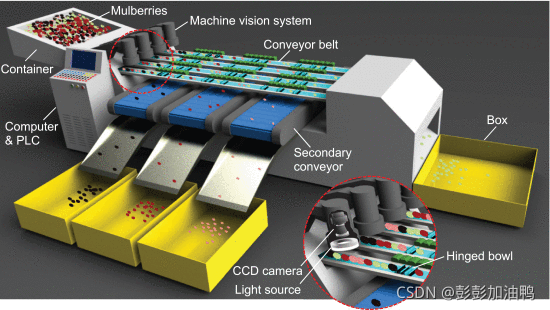
Detection of Mulberry Ripeness Stages Using Deep Learning Models
成熟度分类是桑果后采收管理中最具挑战性的任务之一。人工分拣中微生物污染和人为错误的风险很大:它可能导致加工产品的质量下降和浪费。由于计算机视觉和机器学习的先进发展,自动化分拣成为可能。本研究介绍了利用汇流神经网络(CNN)开发和测试基于计算机视觉的应用,用于桑果成熟阶段的分类的结果。为了降低培训成本,提高分类的准确性,利用转学学习对CNN模型进行了微调。测试中的 CNN 型号包括登森网、初始 v3、ResNet-18、ResNet-50 和 AlexNet。转移学习用于微调模型和提高分类的准确性。AlexNet 和 ResNet-18 网络在分类白桑和黑桑树成熟度方面分别以 98.32% 和 98.65% 的整体准确率表现出最佳性能。此外,当两个基因型的数据集混合时,模型的性能没有变化。ResNet-18 能够在 2.36 分钟内从 600 张水果图像中对基因型和成熟度进行分类,总体准确率为 98.03%,优于其他架构。它表明,该模型可用于精确分类桑树和其他园艺产品的成熟阶段,作为自动分拣系统的一部分。
总结:自己的数据集,数据集大小是样本1000个,两个品种4个成熟度,提出了拟开发的机械设计。
本文来自博客园,作者:落痕的寒假,转载请注明原文链接:https://www.cnblogs.com/luohenyueji/p/16970193.html


 浙公网安备 33010602011771号
浙公网安备 33010602011771号