摄像机标定
1 摄像机标定
在摄像机几何模型中,我们得到了摄像机模型变换矩阵为 ,其中,K为摄像机内参,R,C为摄像机外参。
,其中,K为摄像机内参,R,C为摄像机外参。
为了方便后续推导方便,对公式符合做出一些修改:
1)使用T代替-C表示平移参数, ;
;
2)摄像机内参 在引入像平面扭曲变换(skew)时引入了s后导致参数
在引入像平面扭曲变换(skew)时引入了s后导致参数 不再只表达y轴上的缩放信息,
不再只表达y轴上的缩放信息,
因此在后续参数分解中存在麻烦,更好的表达方式为 ,
, 描述了像平面上xy轴间的夹角;
描述了像平面上xy轴间的夹角;

现在不考虑摄像机内外参细节内容,投影变换矩阵P是一个3*4的变换矩阵,其自由度为11, 只需保证12个元素间的比值一致即可表示同一变换,
因此,该变换实际上少了一个缩放尺度,在三维信息恢复中只能得到一个任意缩放尺度的恢复。
对于摄像机模型参数标定,只需要建立起三维坐标点与图像点之间的足够多映射(11个映射关系),即可求解变换矩阵。
选择映射点需要注意以下两点:
1)选择远多余6对点建立映射关系以确保鲁棒性;
2)三维空间点不应该来自同一个平面,这样会得到一个退化的方程组;
将变换矩阵表达为 ,有
,有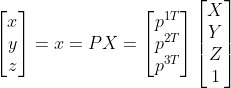 ,
, ,
, ,这里向量与标量没有特别标注,需根据语境理解。
,这里向量与标量没有特别标注,需根据语境理解。
以上表达式中,x与X分别表示图像空间与三维空间中点的坐标,为已知值,P为待求未知量。
一个映射可建立两个方程,待人多个映射整理得: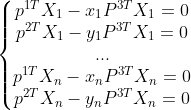 ,令
,令 ,待求矩阵P可改写为列向量
,待求矩阵P可改写为列向量 ,
,
其他已知量被整理到已知矩阵 ,因此得到超定方程组Mp=0。
,因此得到超定方程组Mp=0。
对于一个齐次线性方程组,需要注意两点:
1)p=0满足方程组,但显然不是我们需要得解;
2)假设 满足方程组,则任意实数点乘
满足方程组,则任意实数点乘 同样满足方程组 ;
同样满足方程组 ;
基于以上原因,Mp=0求解需要转化为一个约束问题,即满足p的模长为1情况下求变换Mp的模最小时对应的p。
也就是说对单位向量p施加一个线性变换M,使得变换后的向量模长最短!
对M进行SVD分解得 ,
, ,
,
由于V为向量正交,当p取V中对应的 值最小向量,可以使得
值最小向量,可以使得 一个模长趋近0的向量,
一个模长趋近0的向量,
由于U也为正交向量,||Uq||=||q||,所以经过Uq变换后得到的模长也是趋近0,因此找到了一个最优解!
2 提取摄像机参数
当完成标定后,我们得到了一个投影变换矩阵P,该矩阵描述了相机变换的内外参数,在应用中需要根据变换矩阵P求解具体内外参数。
首先列举处内外参数表达式如下:
, ,
, ,将矩阵P写成
,将矩阵P写成 ,其中
,其中 ,
,
首先求摄像机内参数,建立等价关系 ,
,
观察上式可知 ,由于
,由于 为旋转矩阵的一个行向量,其模长为1,可得
为旋转矩阵的一个行向量,其模长为1,可得 ;
;
由于 ,由于旋转矩阵的各个行向量正交,可得
,由于旋转矩阵的各个行向量正交,可得 ;
;
同理得 ;
;
接下来求解相机扭曲角度,由于合 矩阵的行向量分别代表相机中心与图像y坐标构成平面,相机中心与图像x坐标构成平面和主平面,
矩阵的行向量分别代表相机中心与图像y坐标构成平面,相机中心与图像x坐标构成平面和主平面,
则的行向量表示对应平面上的法向量, 得到图像平面x轴方向向量,
得到图像平面x轴方向向量,  得到图像平面y轴方向向量,
得到图像平面y轴方向向量,
使用余弦公式可得 ;
;
根据等价关系得 ,取模得
,取模得 ,
,
整理得 ,由于
,由于 已经求出,则可以求得
已经求出,则可以求得 ;
;
同理得 ,取模得
,取模得 ,则可求得
,则可求得 ;
;
以上有两点注意:1)由于取值在0到180度,所以无需关注符号,2),的符号目前未知。
接下来求摄像机外参数,已知等价关系和,可以求出旋转矩阵行向量 ;
;
通过等价关系 可得
可得 ,已知旋转矩阵行向量为单位向量,故该计算是可行的;
,已知旋转矩阵行向量为单位向量,故该计算是可行的;
利用旋转矩阵正交关系,可得 ,到此计算出了所有的旋转向量;
,到此计算出了所有的旋转向量;
对于平移信息,有等价关系 ,这里仅有T是未知量,K为一个上三角矩阵,直接回代即可求解T。
,这里仅有T是未知量,K为一个上三角矩阵,直接回代即可求解T。
参考资料:计算机视觉之三维重建 鲁鹏

 浙公网安备 33010602011771号
浙公网安备 33010602011771号