SIFT
SIFT(Scale Invariant Feature Transform) 由 David Lowe 于 2004 年提出。SIFT 算法在不同尺度下检测最强特征点,并给出特征点描述。由于特征点描述基于主方向与尺度信息,故可以使用描述信息对不同尺度,不同方向特征点进行比对。主要步骤如下:
1)使用不同尺度 DoG 算子在 (图像平面,尺度)空间上寻找极值;
2)使用 二次函数 极值确定特征点精确位置与尺度,剔除无小特征点;
3)使用 梯度 信息确定各个特征点方向;
4)基于 特征点方向与特征点尺度 计算特征点描述信息;
1 检测尺度空间上极值
与 "Blob检测" 博文大体一致,使用不同尺度 高斯函数 对原图像卷积,再对卷积图像求差值,得到原图像不同尺度下的 DoG 响应。
将不同尺度下 DoG 排列起来即形成了一个三维函数,其因变量为:位置(x, y), 尺度  ,
, 。
。
在离散函数  上,对比每个点与周边 26 个邻接点关系,当其值均大于邻接点值或者均小于邻接点值时,确定为候选特征点。如下图:
上,对比每个点与周边 26 个邻接点关系,当其值均大于邻接点值或者均小于邻接点值时,确定为候选特征点。如下图:
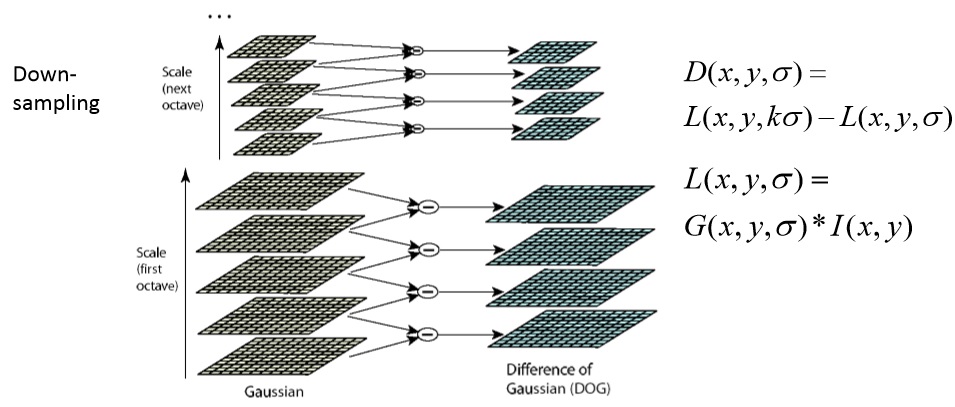
在使用 Laplacian of Gaussian 检测关键点时,不同尺度高斯函数产生的响应不一致,需要使用  进行归一化处理。
进行归一化处理。
而 DoG 等价于 归一化 LoG, 推论如下:
1)根据 heat diffusion equation ,该微分方程描述了温度随时间的变化量与随位置变化量之间的关系;
2)通过类比,将不同尺度  当作热传导中的时间变量,将 (x,y) 当作热传导中的空间变量,得
当作热传导中的时间变量,将 (x,y) 当作热传导中的空间变量,得  ;
;
3)使用 difference of gaussian 近似  ,得
,得  ,
,
进一步化简得  。
。
2 提升特征点位置精度
将函数 视为连续函数,利用二阶泰勒公式可以得到特征点更精确位置与尺度,具体如下:
1)以离散情形下计算特征点位置作为起始点, 表示相对于起始点偏移量;
表示相对于起始点偏移量;
2)二阶泰勒表达式为  ;
;
3)对二阶泰勒表达式求一阶偏导并令其值为0
 ,
,
由于  为函数 在点
为函数 在点  的二阶导数构成的 Hessian 矩阵,根据对称性上式简化为
的二阶导数构成的 Hessian 矩阵,根据对称性上式简化为
 ,
, ,
,
得到极值点(即为精确位置)为  。
。
3 剔除无效特征点
1)将函数  取绝对值并归一化为
取绝对值并归一化为  , 排除
, 排除  对应的极值点。
对应的极值点。
2)使用 Hessian 矩阵剔除边缘响应,思路如下:
当使用 difference of gaussian 对图像卷积时,图像边缘会产生很强响应,而边缘点不是良好的特征点。
对边缘点求 Hessian 矩阵  ,其特征值
,其特征值  远大于
远大于  ,可以利用特征值的这种特性剔除边缘点响应。
,可以利用特征值的这种特性剔除边缘点响应。
对于 2 * 2 矩阵,可以使用矩阵的迹与行列式间接表示特征值,如下:
 ,
,
令  ,
,  ,
,
通过以上关系,假如需要排除  的响应点,仅需验证
的响应点,仅需验证  是否成立即可。
是否成立即可。
4 确定特征点主方向
在特征点附近通过梯度直方图,可以统计出该特征点主方向。使用该主方向描述特征点,使特征点具有旋转不变性。
1)选择特征点对应尺度图像  ;
;
2)求特征点附近窗口梯度幅度与方向
 ,
, ;
;
3)构造 36 bins 梯度直方图,各点梯度强度使用  为 1.5 倍尺度的高斯函数 加权;
为 1.5 倍尺度的高斯函数 加权;
4)使用梯度直方图峰值作为该特征点主方向,当存在双峰且第二峰值大于第一峰值的 80% 时,
该特征点被认为存在两个主方向,也可认为是两个特征点,只是位置与尺度相同而已。
5 特征点描述
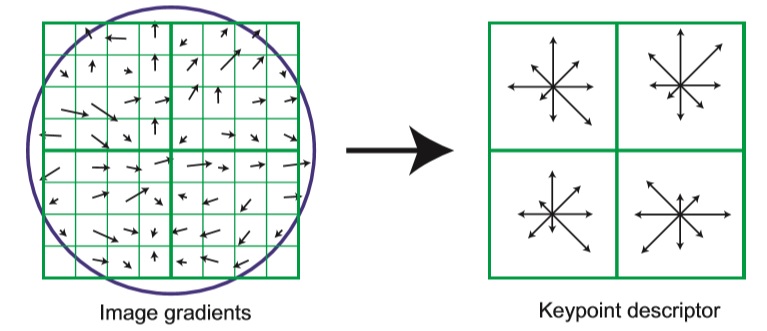
1)将特征点附近划分为 4*4 小区域(上图使用 2 * 2 划分),其区域大小与特征点尺度相关;
2)对每个小区域建立 8 bins 梯度直方图,梯度强度使用高斯函数加权;
3)使用主方向排列每个小区域内梯度方向;
4)对于光照变化引起的仿射变换,对每个小区域内梯度直方图归一化处理,消除光照变化影响;
5)如果光照变化引起非线性变换,如相机饱和,不同朝向3D表面引起,光照变化会对梯度幅度造成非线性变化,但一般不影响梯度方向。
因此, 在归一化梯度直方图上,当梯度强度大于.2 时直接设置为 .2,并再次对梯度直方图归一化处理,这样可得到一个对光照较为稳定的特征点描述。
综上,特征点描述由 4 * 4 * 8 维向量构成,每个分量取值范围为  。
。
6 opencv 实现
opencv 提供了 SIFT 实现,其构造函数如下:
SIFT( int nfeatures=0, int nOctaveLayers=3, double contrastThreshold=0.04, double edgeThreshold=10, double sigma=1.6);
nfeatures:表示最多检测特征点数量,当为默认值0时,返回所有特征点;
nOctaveLayers:检测尺度空间上极大值使用层数为 nOctaveLayers + 3;
contrastThreshold:归一化函数 ,当极大值小于 contrastThreshold 时剔除;
edgeThreshold: 使用该参数剔除边缘特征点,与 contrastThreshold 相反,当 edgeThreshold 越小,剔除点越多;
sigma:使用该值对图像进行预处理(平滑处理);
SIFT 可以分别检测特征点和描述特征点,也可以将其在一个函数中完成,这样可以提升处理效率;
当检测并描述特征点后,使用 DescriptorMatcher 对特征点进行匹配,DescriptorMatcher 有很多派生类实现不同匹配方法,匹配结果存放在 DMatch 中;
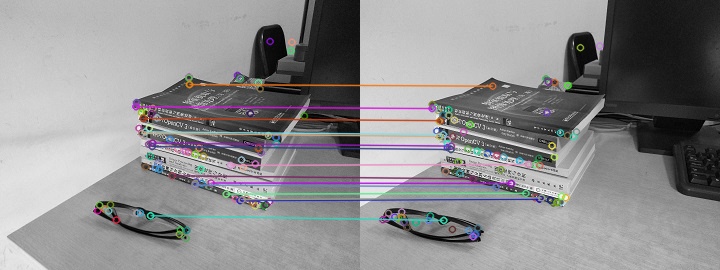
对于大量特征点匹配,其中存在不少匹配错误,可以采用一些方案进行筛查,如:
1)特征向量匹配的最近欧式距离与次近欧式距离应满足关系,最近欧式距离 < 次近欧式距离 * 0.7;
2)取特征向量匹配最小距离的两倍最为“正确”匹配阈值;
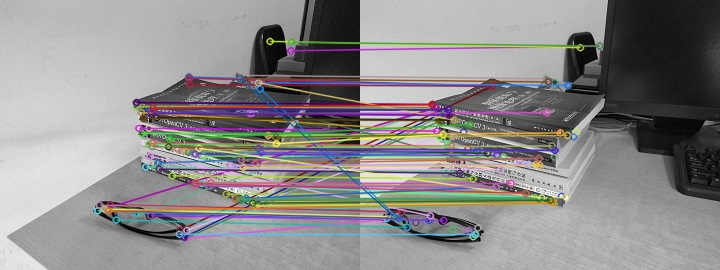
以下给出使用 SIFT 进行特征匹配的代码:
1 cv::Mat img1 = cv::imread("a.jpg", cv::IMREAD_GRAYSCALE); 2 cv::Mat img2 = cv::imread("b.jpg", cv::IMREAD_GRAYSCALE); 3 4 cv::SiftFeatureDetector detector(100); 5 std::vector<cv::KeyPoint> keypoints1, keypoints2; 6 cv::Mat descriptors1, descriptors2; 7 detector.operator()(img1, cv::noArray(), keypoints1, descriptors1); 8 detector.operator()(img2, cv::noArray(), keypoints2, descriptors2); 9 10 cv::BFMatcher matcher(cv::NORM_L2); 11 std::vector<DMatch> matches; 12 matcher.match(descriptors1, descriptors2, matches); 13 14 cv::Mat img_matches; 15 cv::drawMatches(img1, keypoints1, img2, keypoints2, matches, img_matches); 16 cv::imwrite("c.jpg", img_matches); 17 18 double max_dist = 0; 19 20 for (int i = 0; i < matches.size(); i++) 21 { 22 double dist = matches[i].distance; 23 if (dist < min_dist) min_dist = dist; 24 } 25 26 // Draw only "good" matches (i.e. whose distance is less than 2*min_dist, 27 // or a small arbitary value ( 0.02 ) 28 std::vector< DMatch > good_matches; 29 30 for (int i = 0; i < matches.size(); i++) 31 { 32 if (matches[i].distance <= max(2 * min_dist, 0.02)) 33 { 34 good_matches.push_back(matches[i]); 35 } 36 } 37 38 cv::drawMatches(img1, keypoints1, img2, keypoints2, good_matches, img_matches); 39 cv::imwrite("d.jpg", img_matches);
参考资料 Distinctive Image Features from Scale-Invariant Keypoints David G. Lowe
Learning OpenCV 3 Adrian Kaehler & Gary Bradski

 浙公网安备 33010602011771号
浙公网安备 33010602011771号