数据结构与算法之美学习笔记:第二十四讲
一、课前思考
上一节我们学习了树、二叉树以及二叉树的遍历,今天我们再来学习一种特殊的的二叉树,二叉查找树。二叉查找树最大的特点就是,支持动态数据集合的快速插入、删除、查找操作。
我们之前说过,散列表也是支持这些操作的,并且散列表的这些操作比二叉查找树更高效,时间复杂度是O(1)。既然有了这么高效的散列表,使用二叉树的地方是不是都可以替换成散列表呢?
有没有哪些地方是散列表做不了,必须要用二叉树来做的呢?
带着这些问题,我们就来学习今天的内容,二叉查找树!
二、二叉查找树
二叉查找树是二叉树中最常见的一种类型,也叫二叉搜索树。顾名思义,二叉查找树是为了实现快速查找而生的。不过,它不仅仅支持快速查找一个数据,还支持快速插入、删除一个数据。它是怎么做到这些的呢?
这些都依赖于二叉查找树的特殊结构。二叉查找树要求,在树中的任意一个节点,其左子树中的每个节点的值,都要小于这个节点的值,而右子树节点的值都大于这个节点的值。 我画了一个二叉查找树的例子,你一看应该就清楚了。

前一我们讲到,二叉查找树支持快速查找、插入、删除操作,现在我们就依次来看下,这三个操作是如何实现的。
1、二叉查找树的查找操作
首先,我们看如何在二叉查找树中查找一个节点:
- 我们先取根节点,如果它等于我们要查找的数据,那就返回。
- 如果要查找的数据比根节点的值小,那就在左子树中递归查找;
- 如果要查找的数据比根节点的值大,那就在右子树中递归查找。

这里我把查找的代码实现了一下,贴在下面了,结合代码,理解起来会更加容易。
public class BinarySearchTree {
private Node tree;
public Node find(int data) {
Node p = tree;
while (p != null) {
if (data < p.data) p = p.left;
else if (data > p.data) p = p.right;
else return p;
}
return null;
}
public static class Node {
private int data;
private Node left;
private Node right;
public Node(int data) {
this.data = data;
}
}
}
2、二叉查找树的插入操作
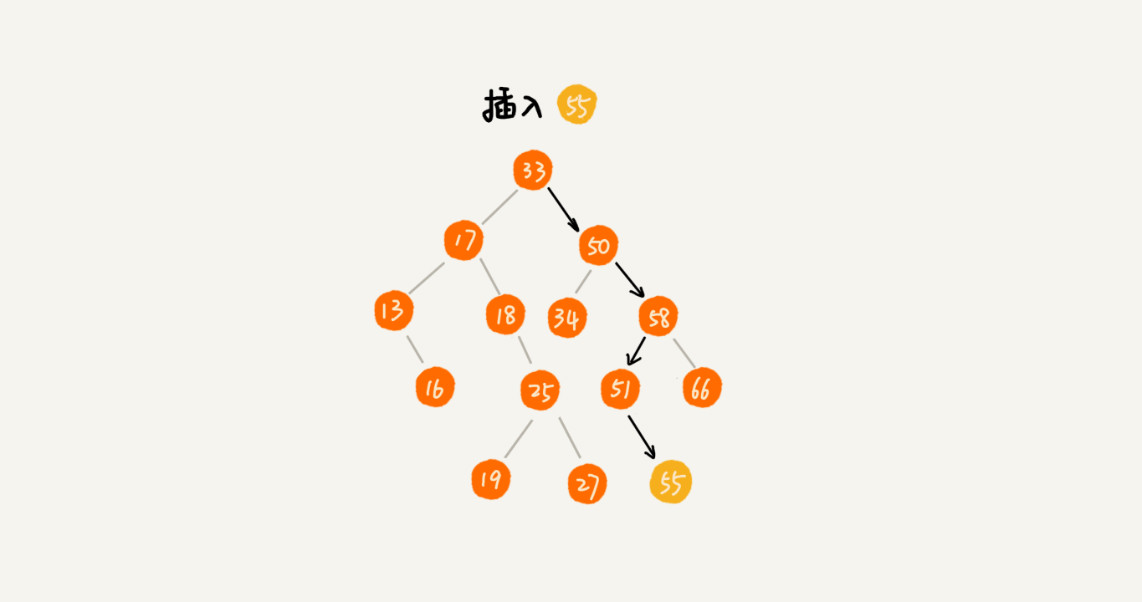
二叉查找树的插入过程有点类似查找操作。新插入的数据一般都是在叶子节点上,所以我们只需要从根节点开始,依次比较要插入的数据和节点的大小关系。
- 如果要插入的数据比节点的数据大,并且节点的右子树为空,就将新数据直接插到右子节点的位置;
- 如果不为空,就再递归遍历右子树,查找插入位置。
- 同理,如果要插入的数据比节点数值小,并且节点的左子树为空,就将新数据插入到左子节点的位置;
- 如果不为空,就再递归遍历左子树,查找插入位置。
同样,插入的代码我也实现了一下,贴在下面,你可以看看。
public void insert(int data) {
if (tree == null) {
tree = new Node(data);
return;
}
Node p = tree;
while (p != null) {
if (data > p.data) {
if (p.right == null) {
p.right = new Node(data);
return;
}
p = p.right;
} else { // data < p.data
if (p.left == null) {
p.left = new Node(data);
return;
}
p = p.left;
}
}
}
3、二叉查找树的删除操作
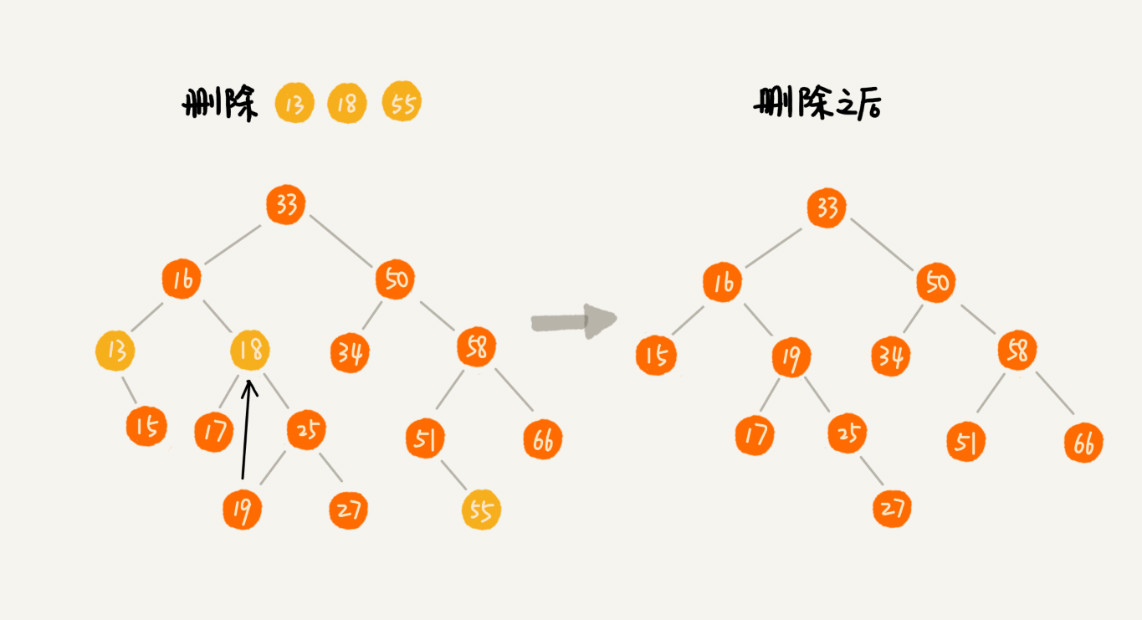
二叉查找树的查找、插入操作都比较简单易懂,但是它的删除操作就比较复杂了 。针对要删除节点的子节点个数的不同,我们需要分三种情况来处理。
- 第一种情况是,如果要删除的节点没有子节点,我们只需要直接将父节点中,指向要删除节点的指针置为null。比如图中的删除节点55。
- 第二种情况是,如果要删除的节点只有一个子节点(只有左子节点或者右子节点),我们只需要更新父节点中,指向要删除节点的指针,让它指向要删除节点的子节点就可以了。比如图中的删除节点13。
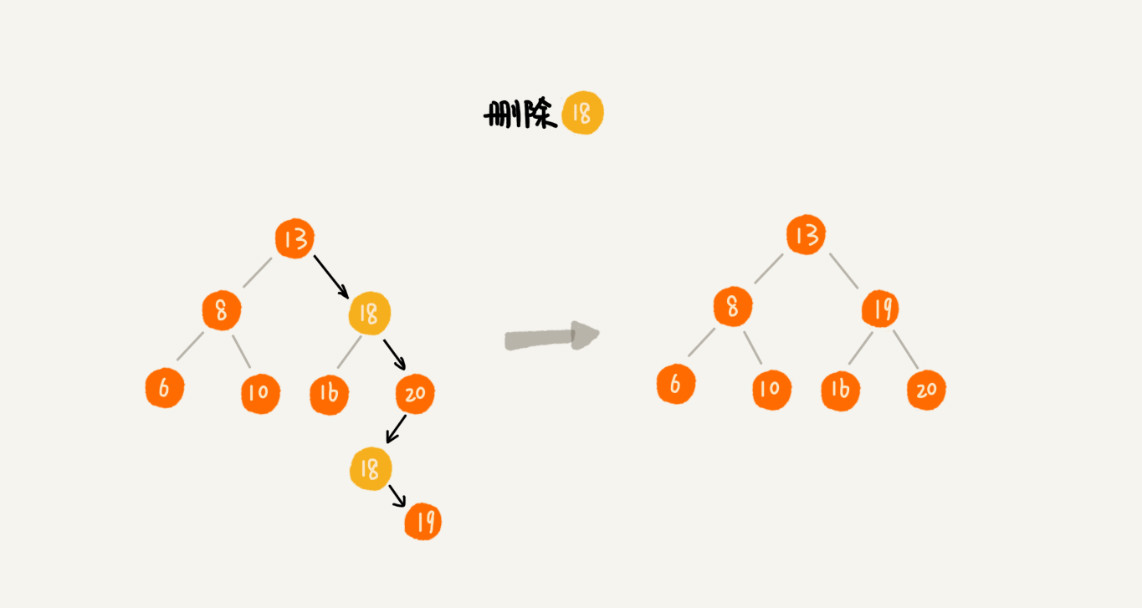
- 第三种情况是,如果要删除的节点有两个子节点,这就比较复杂了。
- 我们需要找到这个节点的右子树中的最大节点,把它替换到要删除的节点上。然后再删除掉这个最小节点,
- 因为最小节点肯定没有左子节点(如果有左子结点,那就不是最小节点了),
- 所以,我们可以应用上面两条规则来删除这个最小节点。比如图中的删除节点18。
老规矩,我还是把删除的代码贴在这里。
public void delete(int data) {
Node p = tree; // p指向要删除的节点,初始化指向根节点
Node pp = null; // pp记录的是p的父节点
while (p != null && p.data != data) {
pp = p;
if (data > p.data) p = p.right;
else p = p.left;
}
if (p == null) return; // 没有找到
// 要删除的节点有两个子节点
if (p.left != null && p.right != null) { // 查找右子树中最小节点
Node minP = p.right;
Node minPP = p; // minPP表示minP的父节点
while (minP.left != null) {
minPP = minP;
minP = minP.left;
}
p.data = minP.data; // 将minP的数据替换到p中
p = minP; // 下面就变成了删除minP了
pp = minPP;
}
// 删除节点是叶子节点或者仅有一个子节点
Node child; // p的子节点
if (p.left != null) child = p.left;
else if (p.right != null) child = p.right;
else child = null;
if (pp == null) tree = child; // 删除的是根节点
else if (pp.left == p) pp.left = child;
else pp.right = child;
}
实际上,关于二叉查找树的删除操作,还有个非常简单、取巧的方法:
- 就是单纯将要删除的节点标记为“已删除”,但是并不真正从树中将这个节点去掉。
- 这样原本删除的节点还需要存储在内存中,比较浪费内存空间,但是删除操作就变得简单了很多。
- 而且,这种处理方法也并没有增加插入、查找操作代码实现的难度。
4、二叉查找树的其他操作
除了插入、删除、查找操作之外,二叉查找树中还可以支持快速地查找:
- 最大节点
- 最小节点
- 前驱节点
- 后继节点
这些操作我就不一一展示了。我会将相应的代码放到GitHub上,你可以自己先实现一下,然后再去上看。
二叉查找树除了支持上面几个操作之外,还有一个重要的特性,就是中序遍历二叉查找树,可以输出有序的数据序列,时间复杂度是O(n),非常高效。因此,二叉查找树也叫作二叉排序树。
三、支持重复数据的二叉查找树
前一讲二叉查找树的时候,我们默认树中节点存储的都是数字。很多时候,在实际的软件开发中,我们在二叉查找树中存储的,是一个包含很多字段的对象。我们利用对象的某个字段作为键值(key)
来构建二叉查找树。我们把对象中的其他字段叫作卫星数据。
1、插入
前面我们讲的二叉查找树的操作,针对的都是不存在键值相同的情况。那如果存储的两个对象键值相同,这种情况该怎么处理呢?我这里有两种解决方法。
第一种方法比较容易:
二叉查找树中每一个节点不仅会存储一个数据,因此我们通过链表和支持动态扩容的数组等数据结构,把值相同的数据都存储在同一个节点上。
第二种方法比较不好理解,不过更加优雅。
- 每个节点仍然只存储一个数据。
- 在查找插入位置的过程中,如果碰到同个节点的值,与要插入数据的值相同,
- 我们就将这个要插入的数据放到这个节点的右子树,
- 也就是说,把这个新插入的数据当作大于这个节点的值来处理。

2、查找
当要查找数据的时候,遇到值相同的节点,我们并不停止查找操作,而是继续在右子树中查找,直到遇到叶子节点,才停来。这样就可以把键值等于要查找值的所有节点都找出来。

3、删除
对于删除操作,我们也需要先查找到每个要删除的节点,然后再按前一讲的删除操作的方法,依次删除。
四、二叉查找树的时间复杂度分析
好了,对于二叉查找树常用操作的实现方式,你应该掌握得差不多了。现在,我们来分析一下,二叉查找树的插入、删除、查找操作的时间复杂度。
实际上,二叉查找树的形态各式各样。比如这个图中,对于同一组数据,我们构造了三种二叉查找树。它们的查找、插入、删除操作的执行效率都是不一样的。图中第一种二叉查找树,
根节点的左右子树极度不平衡,已经退化成了链表,所以查找的时间复杂度就变成了O(n)。
我刚刚其实分析了一种最糟糕的情况,我们现在来分析一个最理想的情况,二叉查找树是一棵完全二叉树(或满二叉树)。这个时候,插入、删除、查找的时间复杂度是多少呢?
从我前面的例子、图,以及还有代码来看,不管操作是插入、删除还是查找,时间复杂度其实都跟树的高度成正比,也就是O(height)。既然这样,现在问题就转变成另外一个了,
也就是,如何求一棵包含n个节点的完全二叉树的高度?
树的高度就等于最高层数减一,为了方便计算,我们转换成层来表示。从图中可以看出,包含n个节点的完全二叉树中,第一层包含1个节点,第二层包含2个节点,第三层包含4个节点,
依次类推,下面一层节点个数是上一层的2倍,第K层包含的节点个数就是2^(K-1)。
不过,对于完全二叉树来说,最后一层的节点个数有点儿不遵守上面的规律了。它包含的节点个数在1个到2^(L-1)个之间(我们假设最高层数是L)。如果我们把每一层的节点个数加起来就是总的节点个数n。也就是说,如果节点的个数是n,那么n满足这样一个关系:
n >= 1+2+4+8+...+2^(L-2)+1 n <= 1+2+4+8+...+2^(L-2)+2^(L-1)
借助等比数列的求和公式,我们可以计算出,L的范围是[log (n+1), log n +1]。完全二叉树的层数大于等于log n +1,也就是说,完全二叉树的高度小于等于log n。
显然,极度不平衡的二叉查找树,它的查找性能肯定不能满足我们的需求。我们需要构建一种不管怎么删除、插入数据,在任何时候,都能保持任意节点左右子树都比较平衡的二叉查找树,
这就是我们下一节课要详细讲的,几种特殊的二叉查找树,平衡二叉查找树。平衡二叉查找树的⾼度接近logn,所以插入、删除、查找操作的时间复杂度也比较稳定,是O(logn)。
五、解答开篇
我们在散列表那节中讲过,散列表的插入、删除、查找操作的时间复杂度可以做到常量级的O(1),非常高效。而二叉查找树在比较平衡的情况下,插入、删除、查找操作时间复杂度才是O(logn),
相对散列表,好像并没有什么优势,那我们为什么还要用二叉查找树呢?
我认为有下面几个原因:
第一,散列表中的数据是顺序存储的,如果要输出有序的数据,需要先进行排序。而对于二叉查找树来说,我们只需要中序遍历,就可以在O(n)的时间复杂度内,输出有序的数据序列。
第二,散列表扩容耗时很多,而且当遇到散列冲突时,性能不稳定,尽管二叉查找树的性能不稳定,但是在编程中,我们最常用的平衡二叉查找树的性能非常稳定,时间复杂度稳定在O(logn)。
第三,笼统地来说,尽管散列表的查找等操作的时间复杂度是常量级的,但因为哈希冲突的存在,这个常量不一定比logn小,所以实际的查找速度可能不一定比O(logn)快。加上哈希函数的耗时,也不 一定就是平衡二叉查找树的效率高。
第四,散列表的构造比二叉查找树要复杂,需要考虑的东西很多。比如散列函数的设计、冲突解决办法、扩容、缩容等。平衡二叉查找树只需要考虑平衡性这一个问题,而且这个问题的解决方案比较 成熟、固定。
最后,为了避免过多的散列冲突,散列表装载因子不能太大,特别是基于开放寻址法解决冲突的散列表,不然会浪费一定的存储空间。
综合这一点,平衡二叉查找树在某些方面还是优于散列表的,所以,这两者的存在并不冲突。我们在实际的开发过程中,需要结合具体的需求来选择使用哪一个。
六、内容小结
今天我们学习了一种特殊的二叉树,二叉查找树。它支持快速地查找、插入、删除操作。
二叉查找树中,每个节点的值都大于左子树节点的值,小于右子树节点的值。不过,这只是针对没有重复数据的情况。对于存在重复数据的二叉查找树,我介绍了两种构建方法,
一种是让每个节点存储多个值相同的数据;另一种是,每个节点中存储一个数据。针对这种情况,我们只需要稍加改造原来的插入、删除、查找操作即可。
在二叉查找树中,查找、插入、删除等很多操作的时间复杂度都跟树的高度成正比。两个极端情况的时间复杂度分别是O(n)和O(logn),分别对应二叉树退化成链表的情况和完全二叉树。
为了避免时间复杂度的退化,针对二叉查找树,我们们设计了一种更加复杂的树,平衡二叉查找树,时间复杂度可以做到稳定的O(logn),下一节我们具体来讲。
七、课后思考
今天我讲了二叉树高度的理论分析方法,给出了粗略的数量级。如何通过编程,求出一棵给定二叉树的确切高度呢?
经典留言(失火的夏天)
确定二叉树高度有两种思路:
第一种是深度优先思想的递归,分别求左右子树的高度。当前节点的高度就是左右子树中较大的那个+1;
第二种可以采用层次遍历的方式,每一层记录都记录下当前队列的长度,这个是队尾,每一层队头从0开始。然后每遍历一个元素,队头下标+1。直到队头下标等于队尾下标。这个时候表示当前层遍历完成。每一层刚开始遍历的时候,树的高度+1。最后队列为空,就能得到树的高度。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号