使用Pytorch实现强化学习——DQN算法
一、强化学习的主要构成
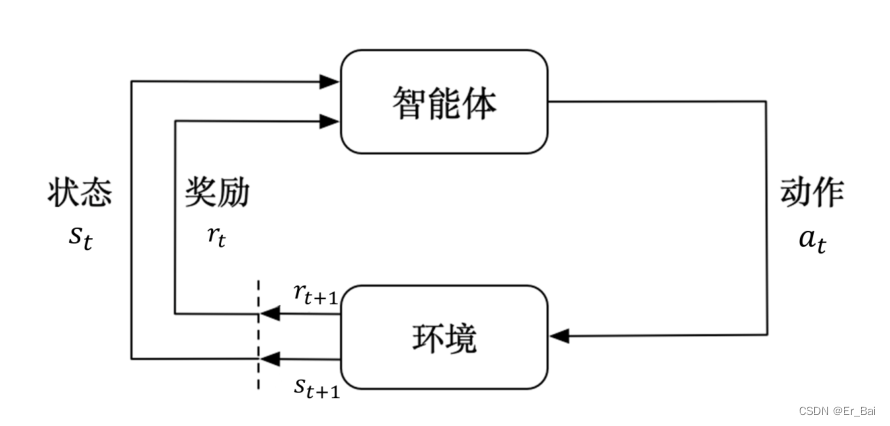
强化学习主要由两部分组成:智能体(agent)和环境(env)。在强化学习过程中,智能体与环境一直在交互。智能体在环境里面获取某个状态后,它会利用该状态输出一个动作(action)。然后这个动作会在环境之中被执行,环境会根据智能体采取的动作,输出下一个状态以及当前这个动作带来的奖励。智能体的目的就是尽可能多地从环境中获取奖励。
二、基于python的强化学习框架
基于python的强化学习框架有很多种,具体可以见这个博主的博客:【强化学习/gym】(二)一些强化学习的框架或代码_o0o_-_的博客-CSDN博客_可解释性的强化学习框架代码
本次我使用到的框架是pytorch,因为DQN算法的实现包含了部分的神经网络,这部分对我来说使用pytorch会更顺手,所以就选择了这个。
三、gym
gym 定义了一套接口,用于描述强化学习中的环境这一概念,同时在其官方库中,包含了一些已实现的环境。
四、DQN算法
传统的强化学习算法使用的是Q表格存储状态价值函数或者动作价值函数,但是实际应用时,问题在的环境可能有很多种状态,甚至数不清,所以这种情况下使用离散的Q表格存储价值函数会非常不合理,所以DQN(Deep Q-learning)算法,使用神经网络拟合动作价值函数。
通常DQN算法只能处理动作离散,状态连续的情况,使用神经网络拟合出动作价值函数, 然后针对动作价值函数,选择出当状态state固定的Q值最大的动作a。
DQN算法有两个特点:
1.经验回放
每一次的样本都放到样本池中,所以可以多次反复的使用一个样本,重复利用。训练时一次随机抽取多个数据样本来进行训练。
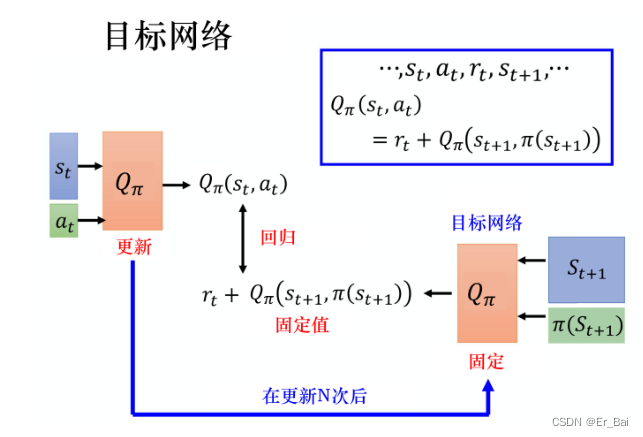
2.目标网络
DQN算法的更新目标时让逼近, 但是如果两个Q使用一个网络计算,那么Q的目标值也在不断改变, 容易造成神经网络训练的不稳定。DQN使用目标网络,训练时目标值Q使用目标网络来计算,目标网络的参数定时和训练网络的参数同步。
五、使用pytorch实现DQN算法
import time
import random
import torch
from torch import nn
from torch import optim
import gym
import numpy as np
import matplotlib.pyplot as plt
from collections import deque, namedtuple # 队列类型
from tqdm import tqdm # 绘制进度条用
device = torch. Device("cuda" if torch.cuda.is_available() else "cpu")
Transition = namedtuple('Transition', ('state', 'action', 'reward', 'next_state', 'done'))
1.replay memory
class ReplayMemory(object):
def __init__(self, memory_size):
self.memory = deque([], maxlen=memory_size)
def sample(self, batch_size):
batch_data = random.sample(self.memory, batch_size)
state, action, reward, next_state, done = zip(*batch_data)
return state, action, reward, next_state, done
def push(self, *args):
# *args: 把传进来的所有参数都打包起来生成元组形式
# self.push(1, 2, 3, 4, 5)
# args = (1, 2, 3, 4, 5)
self.memory.append(Transition(*args))
def __len__(self):
return len(self. Memory)
2.神经网络部分
这一部分就是使用了torch的nn.Module模块,创建了属于自己的module,我写了另外一篇文章讲解了Pytorch中如何创建自己的module:Pytorch创建module的几种方式
class Qnet(nn.Module):
def __init__(self, n_observations, n_actions):
super(Qnet, self).__init__()
self.model = nn.Sequential(
nn.Linear(n_observations, 128),
nn.ReLU(),
nn.Linear(128, n_actions)
)
def forward(self, state):
return self. Model(state)
3.Agent
class Agent(object):
def __init__(self, observation_dim, action_dim, gamma, lr, epsilon, target_update):
self.action_dim = action_dim
self.q_net = Qnet(observation_dim, action_dim).to(device)
self.target_q_net = Qnet(observation_dim, action_dim).to(device)
self.gamma = gamma
self.lr = lr
self.epsilon = epsilon
self.target_update = target_update
self.count = 0
self.optimizer = optim.Adam(params=self.q_net.parameters(), lr=lr)
self.loss = nn.MSELoss()
def take_action(self, state):
if np.random.uniform(0, 1) < 1 - self.epsilon:
state = torch.tensor(state, dtype=torch.float).to(device)
action = torch.argmax(self.q_net(state)).item()
else:
action = np.random.choice(self.action_dim)
return action
def update(self, transition_dict):
states = transition_dict.state
actions = np.expand_dims(transition_dict.action, axis=-1) # 扩充维度
rewards = np.expand_dims(transition_dict.reward, axis=-1) # 扩充维度
next_states = transition_dict.next_state
dones = np.expand_dims(transition_dict.done, axis=-1) # 扩充维度
states = torch.tensor(states, dtype=torch.float).to(device)
actions = torch.tensor(actions, dtype=torch.int64).to(device)
rewards = torch.tensor(rewards, dtype=torch.float).to(device)
next_states = torch.tensor(next_states, dtype=torch.float).to(device)
dones = torch.tensor(dones, dtype=torch.float).to(device)
# update q_values
# gather(1, acitons)意思是dim=1按行号索引, index=actions
# actions=[[1, 2], [0, 1]] 意思是索引出[[第一行第2个元素, 第1行第3个元素],[第2行第1个元素, 第2行第2个元素]]
# 相反,如果是这样
# gather(0, acitons)意思是dim=0按列号索引, index=actions
# actions=[[1, 2], [0, 1]] 意思是索引出[[第一列第2个元素, 第2列第3个元素],[第1列第1个元素, 第2列第2个元素]]
# states.shape(64, 4) actions.shape(64, 1), 每一行是一个样本,所以这里用dim=1很合适
predict_q_values = self.q_net(states).gather(1, actions)
with torch.no_grad():
# max(1) 即 max(dim=1)在行向找最大值,这样的话shape(64, ), 所以再加一个view(-1, 1)扩增至(64, 1)
max_next_q_values = self.target_q_net(next_states).max(1)[0].view(-1, 1)
q_targets = rewards + self.gamma * max_next_q_values * (1 - dones)
l = self.loss(predict_q_values, q_targets)
self.optimizer.zero_grad()
l.backward()
self.optimizer.step()
if self.count % self.target_update == 0:
# copy model parameters
self.target_q_net.load_state_dict(self.q_net.state_dict())
self. Count += 1
4.模型训练函数
def run_episode(env, agent, repalymemory, batch_size):
state = env.reset()
reward_total = 0
while True:
action = agent.take_action(state)
next_state, reward, done, _ = env.step(action)
# print(reward)
repalymemory.push(state, action, reward, next_state, done)
reward_total += reward
if len(repalymemory) > batch_size:
state_batch, action_batch, reward_batch, next_state_batch, done_batch = repalymemory.sample(batch_size)
T_data = Transition(state_batch, action_batch, reward_batch, next_state_batch, done_batch)
# print(T_data)
agent.update(T_data)
state = next_state
if done:
break
return reward_total
def episode_evaluate(env, agent, render):
reward_list = []
for i in range(5):
state = env.reset()
reward_episode = 0
while True:
action = agent.take_action(state)
next_state, reward, done, _ = env.step(action)
reward_episode += reward
state = next_state
if done:
break
if render:
env.render()
reward_list.append(reward_episode)
return np.mean(reward_list).item()
def test(env, agent, delay_time):
state = env.reset()
reward_episode = 0
while True:
action = agent.take_action(state)
next_state, reward, done, _ = env.step(action)
reward_episode += reward
state = next_state
if done:
break
env.render()
time. Sleep(delay_time)
5.训练模型
模型训练使用到的环境时gym提供的CartPole游戏(具体可以看这里:Cart Pole - Gym Documentation (gymlibrary.dev)),这个环境比较经典,小车运行结束的要求有三个:
(1)杆子的角度超过度
(2)小车位置大于 ±2.4(小车中心到达显示屏边缘)
(3)小车移动步数超过200(v1是500)
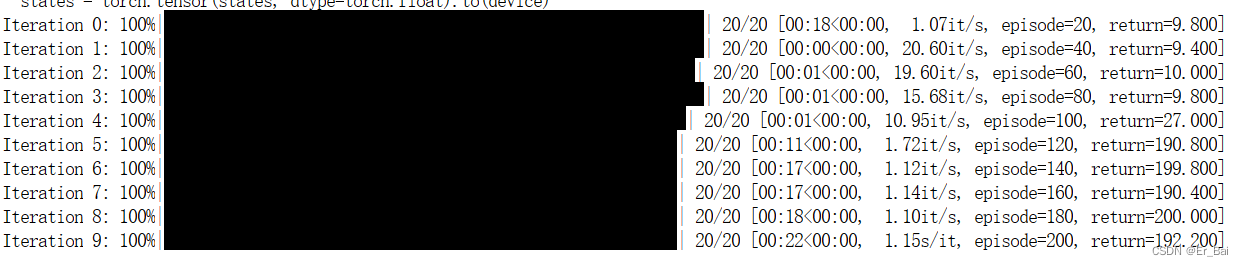
小车每走一步奖励就会+1,所以在v0版本环境中,小车一次episode的最大奖励为200。
【注:关于tqdm的使用解读,我在CSDN上发表了一篇文章(有时间的话我会把这篇文章转移到博客园):python编程之使用tqdm绘制进度条的三种使用方法,如果你不是很理解tdqm的使用,希望这篇文章可以帮助到你!】
if __name__ == "__main__":
# print("prepare for RL")
env = gym.make("CartPole-v0")
env_name = "CartPole-v0"
observation_n, action_n = env.observation_space.shape[0], env.action_space.n
# print(observation_n, action_n)
agent = Agent(observation_n, action_n, gamma=0.98, lr=2e-3, epsilon=0.01, target_update=10)
replaymemory = ReplayMemory(memory_size=10000)
batch_size = 64
num_episodes = 200
reward_list = []
# print("start to train model")
# 显示10个进度条
for i in range(10):
with tqdm(total=int(num_episodes/10), desc="Iteration %d" % i) as pbar:
for episode in range(int(num_episodes / 10)):
reward_episode = run_episode(env, agent, replaymemory, batch_size)
reward_list.append(reward_episode)
if (episode+1) % 10 == 0:
test_reward = episode_evaluate(env, agent, False)
# print("Episode %d, total reward: %.3f" % (episode, test_reward))
pbar.set_postfix({
'episode': '%d' % (num_episodes / 10 * i + episode + 1),
'return' : '%.3f' % (test_reward)
})
pbar.update(1) # 更新进度条
test(env, agent, 0.5) # 最后用动画观看一下效果
episodes_list = list(range(len(reward_list)))
plt.plot(episodes_list, reward_list)
plt.xlabel('Episodes')
plt.ylabel('Returns')
plt.title('Double DQN on {}'.format(env_name))
plt.show()
训练结果如图所示:
参考资料:
蘑菇书EasyRL (datawhalechina.github.io)
DQN 算法 (boyuai.com)
最后,感谢您的观看,您的支持就是对我最大的鼓励!
【注:文章为本人原创,代码是RL有关书籍中的,CSDN上有一篇同样的文章为本人所写(名为:洛洛er),并非复制抄袭】

 浙公网安备 33010602011771号
浙公网安备 33010602011771号