

机器学习笔记(三)——多元线性回归(梯度下降法)
本博客仅用于个人学习,不用于传播教学,主要是记自己能够看得懂的笔记(
学习知识、资源和数据来自:机器学习算法基础-覃秉丰_哔哩哔哩_bilibili
因为自己基础不厚,对Python的运用不太熟,因此在画3D图的时候有亿点点问题。相关博客我会在底下列出。所用数据也会在底下列出,可自己保存为csv文件。
多元线性回归的梯度下降法与一元线性回归没有什么特别大的差别,只是多了点x参数而已。原理就不多说了,直接上代码:
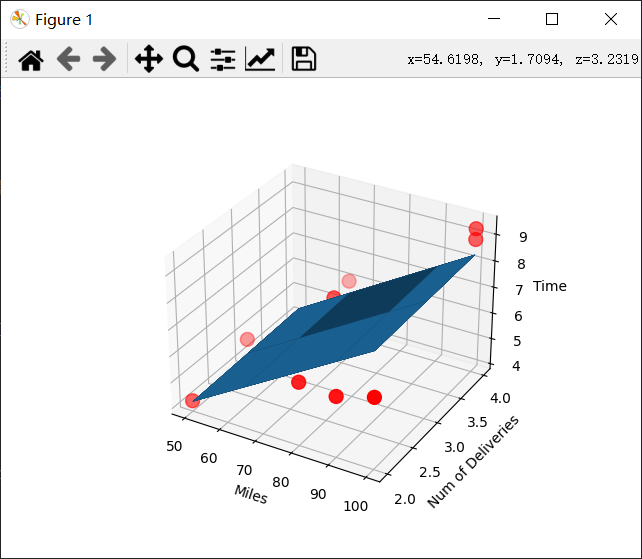
import numpy as np import matplotlib.pyplot as plt from mpl_toolkits.mplot3d import Axes3D # Loss函数 def cal_error(a,b,c,x_data,y_data): sum=0 for i in range(len(y_data)): sum+=(a+b*x_data[i,0]+c*x_data[i,1]-y_data[i])**2 return sum/float(len(y_data))/2.0 #载入数据 data=np.genfromtxt('C:/Users/Lenovo/Desktop/学习/机器学习资料/线性回归以及非线性回归/Delivery.csv',delimiter=',') x_data=data[:,:-1] y_data=data[:,-1] a,b,c=0,0,0 m=float(len(y_data)) lr=0.0001 print("a={0},b={1},c={2},error={3}".format(a,b,c,cal_error(a,b,c,x_data,y_data))) #梯度下降法 for i in range(1000): #梯度下降1000次 a_,b_,c_=0,0,0 for j in range(len(y_data)): a_+=(1/m)*(a+b*x_data[j,0]+c*x_data[j,1]-y_data[j]) b_+=(1/m)*x_data[j,0]*(a+b*x_data[j,0]+c*x_data[j,1]-y_data[j]) c_+=(1/m)*x_data[j,1]*(a+b*x_data[j,0]+c*x_data[j,1]-y_data[j]) a-=lr*a_ b-=lr*b_ c-=lr*c_ #输出结果 print("a={0},b={1},c={2},error={3}".format(a,b,c,cal_error(a,b,c,x_data,y_data))) #输出 #3D画图 fig=plt.figure() #创建一个图 ax=fig.add_subplot(111,projection='3d') #创建一个3D图 ax.scatter(x_data[:,0],x_data[:,1],y_data,c='r',marker='o',s=100) #绘制3D散点图 x0=x_data[:,0] x1=x_data[:,1] x0,x1=np.meshgrid(x0,x1) #生成网格点坐标矩阵 z=a+b*x0+c*x1 ax.plot_surface(x0,x1,z) ax.set_xlabel('Miles') ax.set_ylabel('Num of Deliveries') ax.set_zlabel('Time') plt.show()
所得结果:
a=0,b=0,c=0,error=23.639999999999997
a=0.006971416196678631,b=0.08021042690771771,c=0.07611036240566814,error=0.3865635716109059
所用数据:
100,4,9.3
50,3,4.8
100,4,8.9
100,2,6.5
50,2,4.2
80,2,6.2
75,3,7.4
65,4,6
90,3,7.6
90,2,6.1
参考资料与参考博客:
Matplotlib 教程 | 菜鸟教程 (runoob.com)
【python图像处理】python绘制3D图形_guduruyu的专栏-CSDN博客
matplotlib.pyplot中add_subplot方法参数111的含义_S201402023的博客-CSDN博客
numpy.meshgrid()理解_lllxxq141592654的博客-CSDN博客
Python Matplotlib scatter函数:绘制散点图_fei347795790的博客-CSDN博客_matplotlib scatter
关于numpy.meshgrid()的最直观的解释:
3分钟理解np.meshgrid()_littlehaes的博客-CSDN博客
没办法,我太菜了。

